多光谱领域技术在架空输电线路中的应用系统设计实例
2022-10-17 10:32陈隽苏奕辉许国伟廖静丽林来鑫
电子测试 2022年16期
陈隽,苏奕辉,许国伟,廖静丽,林来鑫
(广东电网有限责任公司汕头供电局,广东汕头,515000)
0 引言
输电线路的正常运作,是保证稳定供电的前提。在输电线路走廊内,树木于输电线路间的距离如果过近,则会产生安全隐患甚至直接影响输电线路的稳定性[1]。处于输电线路走廊内的树木会由于生长会周期性地靠近导线,如果小于运维要求的安全距离,就会导致电线对树木放电引发线路故障停运和山火,因而对走廊内树木进行定期测距、修剪是运维工作的重点之一。对走廊内树木安排周期性修剪砍伐将导致每年的输电线路运维涉及大量的树木修剪砍伐工程量计算[2]。按传统修剪砍伐办法,费时费力效率低下。提高测距精度,提升判断效率,可大大降低人工测距的工作量,节约能力成本。本文基于多光谱领域技术,设计了一套领域识别应用系统,以解决人工丈量树障砍伐区域效率低下的问题,实现了树障砍伐区域的自动获取和自动测距,为树木砍伐工作提供准确信息,可大大提高运维效率。
1 领域识别方案设计
1.1 领域识别流程
(1)分别获取树障砍伐前后完整的待识别线路通道的RGB图像和多光谱图像。
(2)根据树障砍伐前完整的待识别线路通道的RGB图像和树障砍伐前完整的待识别线路通道的多光谱图像得到砍伐前的树障区域图像。
(3)根据树障砍伐后完整的待识别线路通道的RGB图像和树障砍伐后完整的待识别线路通道的多光谱图像得到砍伐后的树障区域图像。
(4)将砍伐前的树障区域图像和砍伐后的树障区域图像输入至训练好的区域识别模型中得到树障砍伐区域图像。
1.2 领域识别用装置
该装置主要由图像获取模块组成,用于分别获取树障砍伐前后完整的待识别线路通道的RGB图像和多光谱图像,包括砍伐前树障区域图像获取模块、砍伐后树障区域图像获取模块、树障砍伐区域图像获取模块。
砍伐前树障区域图像获取模块,用于根据树障砍伐前完整的待识别线路通道的RGB图像和树障砍伐前完整的待识别线路通道的多光谱图像得到砍伐前的树障区域图像。
砍伐后树障区域图像获取模块,用于根据树障砍伐后完整的待识别线路通道的RGB图像和树障砍伐后完整的待识别线路通道的多光谱图像得到砍伐后 的树障区域图像。
树障砍伐区域图像获取模块,用于将砍伐前的树障区域图像和砍伐后的树障区域图像输入至训练好的区域识别模型中得到树障砍伐区域图像[3]。
1.3 领域识别用电子设备
本方案需要使用一种图像处理用电子设备,该电子设备核心部件是一个或多个处理器、存储装置,其结构如图1所示。存储装置用于存储一个或多个程序。一个或多个处理器执行一个或多个程序,处理器可实现本方案任意实施例所提供的区域识别方法。
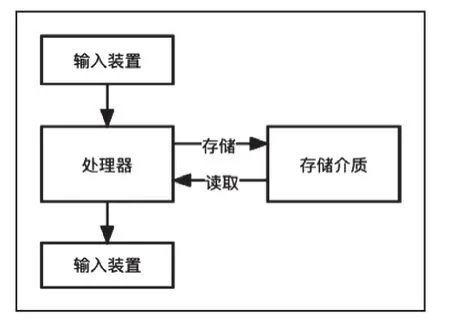
图1 电子设备的结构示意图
1.4 存储介质
本方案需要使用一种计算机可读存储介质,其上存储有计算机程序。其中,该程序被处理器执行时实现具体的区域识别方法。另外,进行砍伐前、砍伐后的RGB图像和多光谱图像处理时,临时结果也需要利用该介质进行保存,直到计算程序当前的计算任务结束,程序将最终计算结果从该存储介质中读出,用于展示或存储到数据库中备用。
2 方案实施
2.1 获取RGB图像和多光谱图像
分别获取树障砍伐前后完整的待识别线路通道的RGB图像和多光谱图像。
通过无人机搭载相机拍摄待识别线路通道树障砍伐修剪前和修剪后的RGB图像和多光谱图像。多光谱指的是由于太阳光是一种不同波长的连续光谱,其波长分布由短到长。不同颜色的可见光就是因波长差异而呈现出色彩变化。由于不同物体属性的区别,在接受到太阳光照射时,物体表面吸收与反射太阳光的比例也不尽相同。多光谱图像更有利于对感兴趣区域进行分割。
获取树障砍伐前后完整的待识别线路通道的RGB图像和多光谱图像包括:分别获取树障砍伐前后待识别线路通道的RGB图像和多光谱图像;分别对RGB图像和多光谱图像进行剪裁和拼接得到完整的待识别线路通道的RGB图像和完整的待识别线路通道的多光谱图像。通过无人机搭载的相机拍摄的待识别线路通道树障砍伐修剪前和修剪后的RGB图像和多光谱图像并不是一张能够反映完整的待识别线路通道的图像,而是对待识别线路通道进行了多张图像的拍摄,需要对拍摄的图像进行剪裁和拼接,从而获得树障砍伐修剪前和修剪后完整的待识别线路通道的图像,以便后续对树障砍伐区域进行识别。
2.2 RGB图像和多光谱图像处理
分别对RGB图像和多光谱图像进行剪裁和拼接得到完整的待识别线路通道的RGB图像和完整的待识别线路通道的多光谱图像,包括:根据拍摄得到的RGB图像生成RGB图像的正射影像;根据拍摄得到的多光谱图像生成多光谱图像的正射影像;将RGB图像的正射影像进行剪裁和拼接得到完整的待识别线路通道的RGB图像;将多光谱图像的正射影像进行剪裁和拼接得到完整的待识别线路通道的多光谱图像。
正射影像是具有正射投影性质的遥感影像。原始遥感影像因成像时受传感器内部状态变化、外部状态及地表状况的影响,均有程度不同的畸变和失真。对遥感影像的几何处理,不仅提取空间信息,如绘制等高线,也可按正确的几何关系对影像灰度进行重新采样,形成新的正射影像。将拍摄得到的RGB图像和多光谱图像生成对应的正射影像,对正射影像进行剪裁和拼接得到完整的待识别线路通道的RGB图像和多光谱图像。正射影像可以提高图像的精度,更有利于砍伐区域的识别。
2.3 获取砍伐前树障区域
根据树障砍伐前完整的待识别线路通道的RGB图像和树障砍伐前完整的待识别线路通道的多光谱图像得到砍伐前的树障区域图像。
根据树障砍伐前完整的待识别线路通道的多光谱图像进行树障区域提取[4],得到砍伐前的树障区域的多光谱图像,再结合树障砍伐前完整的待识别线路通道的RGB图像,得到砍伐前的树障区域图像。
根据树障砍伐前完整的待识别线路通道的RGB图像和树障砍伐前完整的待识别线路通道的多光谱图像得到砍伐前的树障区域图像包括:根据树障砍伐前的待识别线路通道的多光谱图像得到砍伐前的树障区域多光谱图像;根据砍伐前的树障区域多光谱图像和树障砍伐前的待识别线路通道的RGB图像得到砍伐前的树障区域的RGB图像。对树障砍伐前的待识别线路通道的多光谱图像进行感兴趣区域提取,得到砍伐前的树障区域多光谱图像。根据砍伐前的树障区域多光谱图像对树障砍伐前的待识别线路通道的RGB图像进行图像分割,得到砍伐前的树障区域的RGB图像。先对多光谱图像进行感兴趣区域提取,得到砍伐前的树障区域多光谱图像,再对RGB图像进行分割,使得到的砍伐前的树障区域的RGB图像更加精确。
2.4 获取砍伐后的树障区域
根据树障砍伐后完整的待识别线路通道的RGB图像和树障砍伐后完整的待识别线路通道的多光谱图像得到砍伐后的树障区域图像。
根据树障砍伐后完整的待识别线路通道的多光谱图像进行树障区域提取,得到砍伐后的树障区域的多光谱图像,再结合树障砍伐后完整的待识别线路通道的RGB图像,得到砍伐后的树障区域图像。
根据树障砍伐后完整的待识别线路通道的RGB图像和树障砍伐后完整的待识别线路通道的多光谱图像得到砍伐后的树障区域图像包括:根据树障砍伐后的待识别线路通道的多光谱图像得到砍伐后的树障区域多光谱图像;根据砍伐后的树障区域多光谱图像和砍伐后的待识别线路通道的RGB图像得到砍伐后的树障区域的RGB图像。对树障砍伐后的待识别线路通道的多光谱图像进行感兴趣区域提取,将无用的干扰区域过滤掉,得到砍伐后的树障区域多光谱图像。根据砍伐后的树障区域多光谱图像对砍伐后的待识别线路通道的RGB图像进行图像分割,在砍伐后的待识别线路通道的RGB图像中提取与砍伐后的树障区域多光谱图像相同的区域,得到砍伐后的树障区域多光谱图像。
2.5 输入区域识别模型获得树障砍伐区域图像
将砍伐前的树障区域图像和砍伐后的树障区域图像输入至训练好的区域识别模型中得到树障砍伐区域图像。
将分割得到的砍伐前的树障区域图像和砍伐后的树障区域图像输入至训练好的区域识别模型中,进行线路通道树障砍伐前和砍伐后的识别,得到树障砍伐区域图像。
区域识别模型为DeepLabv3+模型。DeepLabv3+模型训练时使用的图片格式与待识别线路通道的图片格式一致。可以通过迁移学习对DeepLabv3+模型进行训练,还可以基于深度学习进行训练。示例性的,基于地物分类遥感影像对DeepLabv3+模型进行训练,拿到特征提取层的训练参数,迁移到砍伐倒伏数据集训练中,得到区域识别模型。将砍伐前的树障区域图像和砍伐后的树障区域图像输入至训练好的DeepLabv3+模型中进行树障砍伐区域识别[5],得到精准的树障砍伐区域。
3 总结
本文所提出的树障区域识别方案,通过分别获取树障砍伐前后完整的待识别线路通道的RGB图像和多光谱图像,根据树障砍伐前的RGB图像和多光谱图像得到砍伐前的树障区域图像,根据树障砍伐后的RGB图像和多光谱图像得到砍伐后的树障区域图像,并去除RGB图像和多光谱图像中的多余的区域,避免其它区域对识别树障砍伐区域的影响,最后将砍伐前和砍伐后树障区域图像输入至训练好的区域识别模型中得到树障砍伐区域图像。可解决人工丈量树障砍伐区域效率低下的问题,实现高精度的树障砍伐区域的自动提取,提高树木砍伐区域获取效率。
猜你喜欢
农业工程学报(2022年8期)2022-08-08
建材发展导向(2021年19期)2021-12-06
科学24小时(2019年6期)2019-09-05
中国国家旅游(2018年10期)2018-10-19
华东师范大学学报(自然科学版)(2018年3期)2018-05-14
西部论丛(2017年5期)2017-10-25
光学仪器(2016年6期)2017-04-24
中学数学杂志(高中版)(2016年4期)2016-07-27
科学启蒙(2015年6期)2015-08-04
中学数学杂志(高中版)(2008年5期)2008-11-24