长距离调水管网在线调度系统设计
2022-10-16 08:44陈云鹏青岛研博电子有限公司
珠江水运 2022年18期
陈云鹏 青岛研博电子有限公司
面对逐年增加的调度任务,传统的调度系统虽然可以满足日常的供水、调度需求,但是由于管道老化、控制结构单一,系统固定等因素,不仅无法达到预期的处理效果,反而形成了不同的问题和缺陷,严重的甚至会对管道造成危害,阻碍水资源日常的调度工作。因此,对长距离调水管网在线调度系统进行设计。考虑到最终测试结果的稳定性与可靠性,本文会选择较为真实的调度系统进行研究,以青岛市的调水管网作为分析背景,结合实际的调度需求以及标准,从智能化、网络化的角度,对系统的各个调度模块进行阶段性的调整,设定动态的调度目标,构建更为灵活、多元化的水资源调度结构,为区域性水资源调度工作提供更大的便利条件。
1.系统硬件设计
1.1 限幅电路
将初始的线路设定为单相接地,设定电压为220V,额定电流为1600A。在电路的侧向位置安装一个定向的控制端口,与数据采集装置相关联,避免调水管网调度应用过程中,受到冲击电压的威胁。在限制端口处接入一个互感器,标定母线位置,并在终端加入一个限幅电源,适时过滤掉冲击电压,形成一个循环的闭合电路,具体如图1所示。
根据图1,可以完成对限幅电路的设计。为了增加系统的调度速度,可以在限幅电路内侧R1-R6之间增设三个二极管,调整电路的增幅频率,此时,限幅电路的功率误差约为0.05瓦,根据电路的运行范围,调节其中2个电阻的阻值,将互感器标定的感应电压范围提升至+5V~-5V,在线路正常运行时增设一个监测装置,一旦电路发生故障,可以最大程度避免故障信息被滤掉,确保限幅电路的稳定运行。
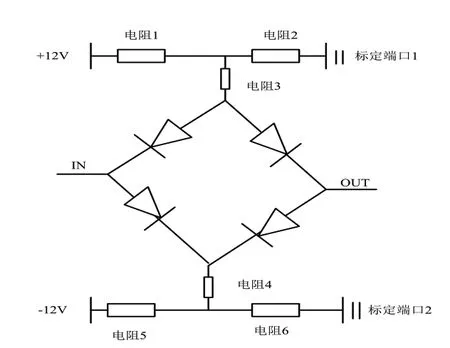
图1 限幅电路图示
1.2 嵌入式调度传感器设计
电路边缘端口接入S3C44B0X型号的ARM芯片,在限幅电路上安装一个ARM微处理器,形成一个小型的微控制程序,综合控制元件板上设定一个TAG调试接口,同时与LCD接口、键盘以及RS485端口相关联,营造嵌入式的控制环境。ARM芯片侧上方需要接入一个同向调度的传感器,与系统硬件中的各个调度监测节点纵向连接。构建感应调度框架,具体如图2所示。
根据图2,可以完成对嵌入式传感器感应框架的设计。随后,系统对于线上的调度目标相对较多,需要有针对性地作出调整,以传感器作为识别的引导,终端信号执行。此时,调节不同位置上的电阻,分别是电阻2和电阻4,分化电路中的电流,缓解此时嵌入传感器自身的压力,在确定相关装置的运行趋于稳定后,调节系统的总电压,控制ADC引脚的电压在0~3.5V之间,电路中接入稳压二极管,营造安全、稳定的系统控制环境,与嵌入式调度传感器形成串联的关系,通过流量传感器、压力传感器产生频率信号,传输信号至调度传感器之中,执行预设的指令,再由于放大器扩大信号的覆盖范围,确保传感器的应用效果,实现嵌入式调度传感器的设计。
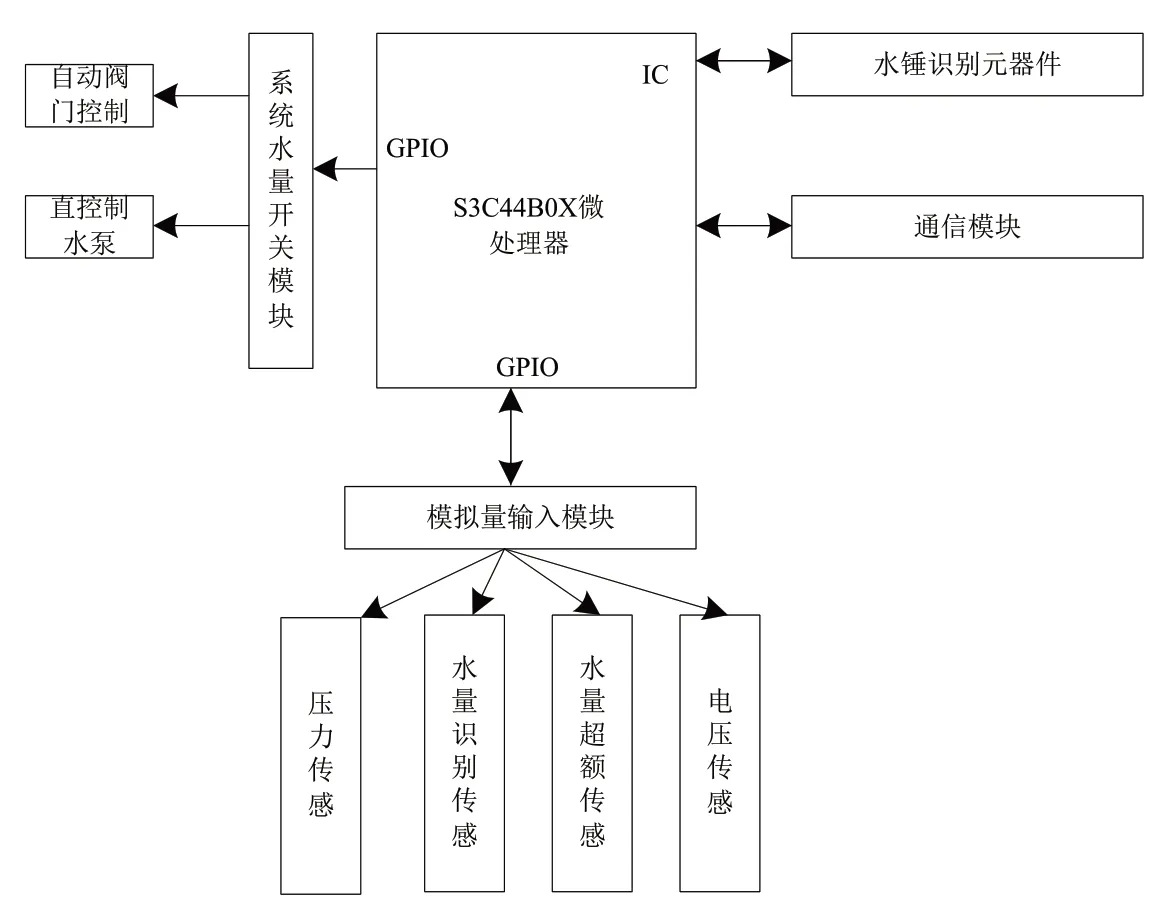
图2 嵌入式传感器感应框架图示
2.系统软件设计
2.1 水锤风险监控的软件程序设计思路
在软件设计中,当输入调度方案后,需要模拟调度过程,水锤态势应急监测,是系统选取调度方案中,非常重要的约束条件。当系统模拟调度原理的过程中,通过采集到的风险值、流量疏散能力与正常情况下能力值、流量值信号进行对比,判断是否可能发生水锤事故,并进行提前预警,提醒系统放弃该方案或者优化该方案。
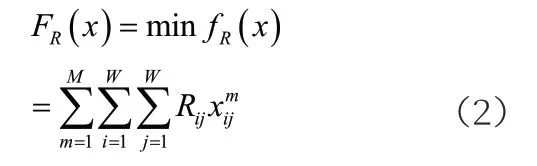
水锤事故的发生受到不确定因素影响,以风险最低、时间最短和容量最大为指标,构建调度方法中水锤风险判断模型F(X),用f表示水锤风险R的目标函数,f表示水流疏散时间T的目标函数,f表示容量C的目标函数,则F(X)如下所示:

用R表示调度方案e上的水锤风险值,x表示时刻t由任意地区加入e的风险约束条件,M表示总疏散条件值,水锤风险的评估条件函数为F(x),如下所示:
用v(t)表示调度方案影响下,时刻t调度方案e上的水流速度,则水流疏散时间最短模型F(x)如下所示:
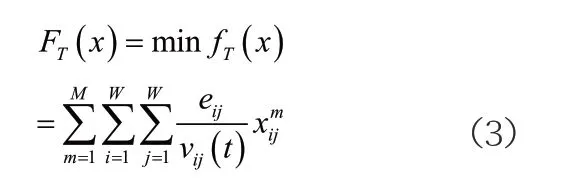
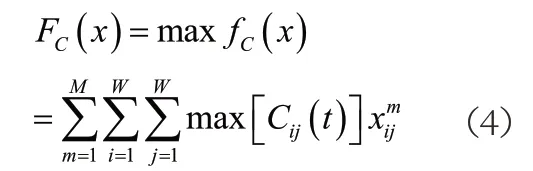
用C(t)表示时刻t方案e的管道容量,C表示时刻t方案e最大通行容量,则疏散容量风险估计模型F(x)如下所示:
通过对三个条件的判断,可以评估出发生水锤的实际风险,通过设定阈值,完成调度方案与水锤风险的关系,对方案及时调整,避免水锤事故的发生。
2.2 充放水调度程序设计
在完成对水锤风险识别模块的设计之后,接下来,需要构建充放水调度程序。通常情况下,调度系统对于水资源的调控,是需要指令和定向程序进行引导的,调度范围相对固定。可以根据日常模拟推演的调度方案,计算出充放水的单元调度流量,具体如下公式5所示:
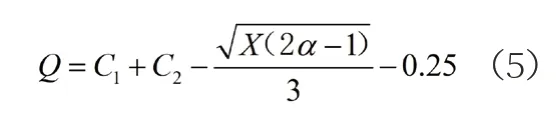
公式(1)中:Q表示单元调度流量,C、C为正反方向的流量,X表示充水速度,α表示单元调度距离。通过上述计算,最终可以得出实际的单元调度流量。
通过充放水程序的控制,推演青岛市不同区域调水管道的流量、压力、管内空气等运行状态,以此来判断时间、空气阀状态是否合理,完成充放水调度程序的设计。
2.3 GIS数据库设计
在完成对充放水调度程序的设计之后,接下来,针对泵站的调度需求,定位调度区域,设计GIS数据库。将功能模块与充放水调度程序关联,营造稳定的调度环境。设定切换指令,设定在数据库之中,在实际应用的过程中,先对供水用户识别定位,根据供水需求,利用数据库采集基础调度数据,并构建数据库协调调度流程,具体如图3所示。
根据图3,可以完成对数据库协调调度流程的构建,配合系统的充放水程序,形成动态多方向的调度数据库,利用GIS定位技术,实现在线实时调度,完成对系统软件的设计。
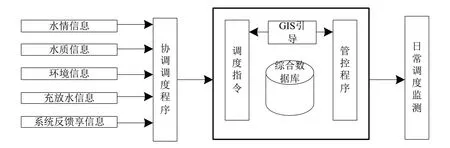
图3 数据库协调调度流程图示
3.系统测试
3.1 测试准备
先依据水资源的调度要求,结合Agent协调机制,构建系统初始调度逻辑,设定单元调度目标。此时,计算出系统覆盖范围之内,可供调控的水资源总量,如下公式6所示:
公式2中:H表示水资源总量,m表示标定水量,e表示水源调度距离,v表示调度时限差异。通过上述计算,最终可以得出实际的水资源总量。需要注意的是,系统必须完成对92%水资源的监控。
随后,针对于区域内用户水压、水量、供水方向等设定,预设系统的标定指标参数。根据调水管网的分布区域,布设对应数量的调度监测节点。每一个节点均是独立的,且在实际应用时可以关联使用,获取数据。以此为基础,在基础的调度系统之中,接入SCADA分流调度程序,以指令引导的方式对各个区域的水流量监控,形成对应的调度关系。核定测试的设置以及装备是否处于稳定的运行状态,并确保不存在影响最终测试结果的外部因素,核定无误后,开始具体测定。
3.2 测试过程及结果分析
在上述搭建的测试环境之中,结合长距离调水管网的应用需求以及标准,进行测试。首先,利用IT和OT技术根据实时工况与调度需求,构建初始的水力调度模型。系统中设定调度周期,一般为7天一个周期,共设定20个周期。关联各个调度检测节点,获取调水管网的基础性数据信息,根据日常的调度需求,建立动态的调度环节。具体如图4所示。
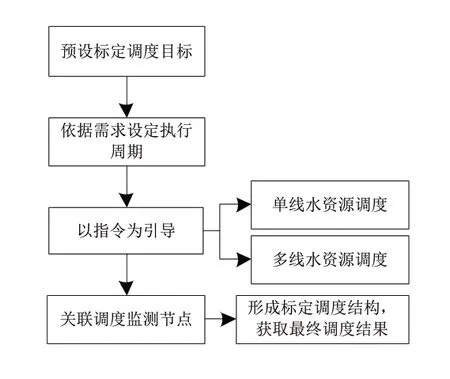
图4 系统动态调度环节图示
根据图4,可以完成对系统动态调度环节的构建与调整。随后,在青岛市的调水管网中,针对于5条不同的管道,测定其调度速度。利用指令编制平台,将测定的目标编制成对应的指令,采用BIM+GIS+IOT技术,测定水域中的水锤对调度工作的大范围影响概率,确保其在15%以下,即不影响测定结果的准确度。在系统中加入调度指令,将100名用户划分为三个小组,分别是20人、30人以及50人,分区域对各个位置的用户进行水资源的调度,测定系统对不同测试小组的调度时间,具体如表1所示。

表1 测试结果分析表
根据表2,可以完成对测试结果的分析与研究:通过三个小组的测试,可以得知本文所设计的系统,针对于多用户的水资源调度时间相对较短,能够更为精准地定位、描述出水锤现象的延伸位置,降低调度误差,对泵站水资源进行更为高效的调度处理,具有实际的应用价值。
4.结束语
综上所述,便是对长距离调水管网在线调度系统的设计以及应用分析。对比于初始的调度系统,本文所设计的多方向、多目标的线上调度系统更为灵活、多变,在复杂的水资源调度环境之中,可以同时对多条管线进行控制和调度,以指令引导的方式,增加调度系统的应用效率以及质量,从根源上降低日常调度工作出现的误差,以此来达到大范围引水的目的,增强长距离调水管网在线调度系统的实际应用效果和能力。
猜你喜欢
湖南水利水电(2021年6期)2022-01-18
系统工程与电子技术(2021年8期)2021-07-27
当代水产(2019年10期)2019-12-18
水利规划与设计(2017年8期)2017-12-20
水利科技与经济(2016年7期)2016-04-25
物理化学学报(2015年7期)2015-12-30
新疆农垦科技(2014年7期)2014-02-28
天津大学学报(社会科学版)(2012年5期)2012-03-25
上海理工大学学报(2012年1期)2012-03-20
水下无人系统学报(2011年6期)2011-09-19