基于多样性特征协同技术的飓风前后森林破坏遥感监测
2022-10-15 06:22:34钟娴冯伟张亚丽全英汇黄文江邢孟道
遥感学报 2022年9期
钟娴,冯伟,张亚丽,全英汇,黄文江,邢孟道,3
1.西安电子科技大学 电子工程学院,西安710071;
2.中国科学院空天信息创新研究院,北京100094;
3.西安电子科技大学 前沿交叉研究院,西安710071
1 引言
作为自然生态系统的组成部分,森林在减缓大气碳浓度和控制全球变暖方面发挥着重要作用。森林植被遭受破坏会对生态系统产生诸多不利的影响(郑粉莉等,1993)。飓风是破坏森林生态系统的主要自然干扰因素(Christopoulou等,2019);它通过广泛地干预森林的组成结构和演替,来影响陆地碳汇(Boutet和Weishampel,2003)。从森林火灾管理的角度来看,飓风最直接的影响是将大量的树木吹倒,使之成为死燃料,增加火灾发生风险(Myers等,1998)。据粮农组织统计,由于受到各种因素的影响,全球森林面积持续减少,年净损失率为0.14%,损失面积高达占55810 km2(FAO和UNEP,2020)。因此,实时地监测森林的变化与受损情况,高效地获取森林受灾区域的信息,可以为森林资源管理部门的应急决策提供重要的参考数据。目前,传统的实地调查方法在监测森林工作中面临巨大挑战。例如,森林的覆盖面积广,传统方法不仅费时费力,而且监测区域有限,无法达到高效率森林监测任务需求;另外,暴风席卷森林后,大量树木被吹倒,交通受阻严重,无法进入森林深处进行勘查(Camarretta等,
2020)。
基于遥感技术的森林变化检测是指利用同一地区不同时间获取的遥感影像来提取森林的变化信息。目前,遥感变化检测的主要任务包括3类:确定是否发生变化、判断变化区域的位置以及地物的变化过程(孙晓霞等,2011),本文主要研究森林遥感影像中的地物变化情况。变化特征信息的提取是遥感变化检测算法的关键步骤,基于像素的变化特征提取方法简单易行,因此广泛应用于森林变化检测中(杨强等,2015;颜伟等,2019)。该方法是在遥感影像的像素基础上直接提取地物变化信息,主要包括光谱变化向量分析法和植被指数差异法等;其中,植被指数差异法是一种分析土地表面植被覆盖变化情况的检测方法,由于植被指数对植被的生长状态、类型等参数的变化情况十分敏感,因此利用这种方法来检测森林的变化情况可以取得较好的效果(Nelson,1982)。Lyon等(1998)利 用归 一化 植被 指数(NDVI)的差值分析了不同地区的森林植被覆盖变化情况,取得了不错的监测性能(黄春波等,2015)。然而,随着遥感影像空间分辨率的提升,基于像素的变化检测缺乏邻近像元的空间特征,难以全面反映高分辨率影像上地物的信息(沈文娟等,2018)。此外,由于影像的空间分辨率提高,地物目标的细节信息更加丰富,导致同谱异物和同物异谱现象普遍存在(陈珂等,2013),这会直接影响地物目标分类识别及其变化信息提取的性能。
由于基于像素的变化特征提取同物异谱现象严重,因此仅利用光谱信息进行森林变化监测难以满足对目标变化检测准确性的需求;而空间信息,例如纹理特征在区分具有相似光谱特征的不同地物类别以及具有不同光谱特征的同一类地物过程中存在明显优势(Zhang等,2017)。因此,目前对象多特征协同的变化检测算法成为基于遥感影像的变化检测领域的热点(Du等,2013)。例如,庄会富等(2016)提出了基于纹理特征的影像变化检测算法,通过多方向、多个纹理特征构建差异影像提高变化检测的精度;李亮等(2014)将光谱信息与纹理信息结合提出多特征融合的变化检测算法;Rich等(2010)融合纹理特征和光谱特征构建多元回归模型来分析森林受灾后的变化情况。
然而,当前的纹理特征的获取算法依旧保留着传统的固定式计算模式,未充分地考虑到地物空间分布的多样性。传统的纹理特征是以光谱特征为基础,然后设置单一的滑动窗口进行对输入图像的像素进行纹理信息计算(Puig和García,2001)。基于单一窗口的方法提取纹理信息的准确性取决于各种参数的选择,研究表明,窗口大小是影响纹理特征准确性最关键的参数(Murray等2010;Garcıˊa-Sevilla和Petrou,2001)。然而,窗口大小和空间信息含量一直是个难以平衡的问题(Murray等,2010)。窗口太小,会导致同一种纹理的内部出现误分割;窗口太大,则会在纹理的边界区域出现空间信息噪声,影响遥感图像分类的准确性(Puissant等,2005)。因此,如何获得准确的纹理信息是特征提取的重要研究方向之一。
森林变化检测方法在提取出变化特征信息之后,第二步是通过阈值分割法或机器学习分类算法进行变化检测(佟国峰等,2015;邵亚奎等,2020)。集成学习算法是常用的机器学习分类算法之一,它通常比单个基分类器更准确(Feng和Bao,2017;Feng等,2019a和2019b)。然而,大多数集成模型在面对高维度数据时仍然束手无策,还会产生过拟合现象,导致分类精度降低。目前,学者们通过优化集成的生成过程,提出了改进算法,如旋转森林算法;旋转森林算法利用主成分分析(PCA)对原始特征空间进行旋转,生成每个基分类器的训练集,增强了集成模型的性能(Rodriguez等,2006)。
为了进一步提高森林变化监测性能,本文提出了基于多样性特征协同技术的飓风前后森林破坏遥感监测算法。针对单一窗口大小造成纹理特征提取不够准确的问题,提出了基于复合窗口的纹理特征提取方法,并计算出森林变化前后遥感影像归一化植被指数(NDVI)的差值和增强植被指数EVI(Enhanced Vegetation Index)的差值,并建立了多样性特征集合协同模型,融合NDVI差值、RVI差值和纹理特征,增加了特征的丰富性;针对维度诅咒与过拟合问题,本文提出了基于特征分离的旋转森林改进方法。
2 多样性特征协同算法
本文算法主要包括3个步骤:(1)变化特征提取,(2)多样性特征融合,(3)集成分类模型训练,具体实现步骤如下。
2.1 变化特征提取
2.1.1 植被指数差值计算
利用遥感影像的植被指数差异进行森林变化监测的核心是对变化前后的遥感影像NDVI值和EVI值进行计算。NDVI可以反映土地覆盖植被状况(Gong等,2006),而EVI是植被生长状态及植被覆盖度的指示因子(Lin,2012),其时序数据也已成为监测土地覆盖变化的基本手段(Wang等,2019)。NDVI(Wang等,2019)和EVI(Lin,2012)的计算公式分别为
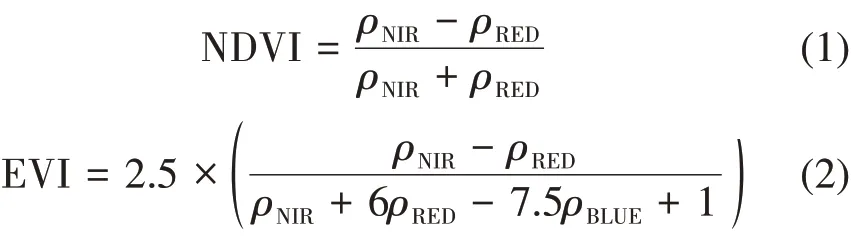
式中,ρNIR、ρRED和ρBLUE表示遥感影像的近红外光谱波段反射率、红光谱波段反射率和蓝光谱波段反射率,通过以上公式计算得到风暴前后森林遥感影像的植被指数NDVI1和NDVI2,以及EVI1和EVI2,并计算变化前后的植被指数差值:

获得遥感影像变化特征Xspe={ΔNDVI;ΔEVI}。
2.1.2 基于复合窗口的纹理特征提取
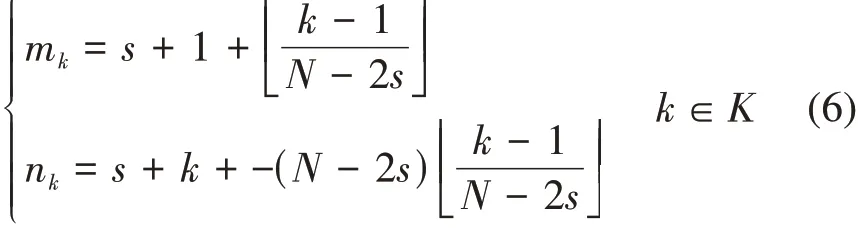
本文提出了一种基于复合窗口的纹理特征提取方法,假定两个正方形窗口w1和窗口w2的大小分别为(2s+1)×(2s+1),s≥0和,(2t+1)×(2t+1),t≥0,且w1的尺寸大于w2。假设多光谱遥感图像的大小为M×N,包含D个波段,利用复合窗口对该图像以步距为1进行滑动扫描。当两个窗口同时移动时,窗口所处位置共有K种可能:

因此,它们的共同的中心点坐标可以表示为
w1代表大窗口,w2表示小窗口,令I(m,n,d)表示图像第d个波段中位于坐标(m,n)的像素点,从第k个窗口提取的值可以表示为
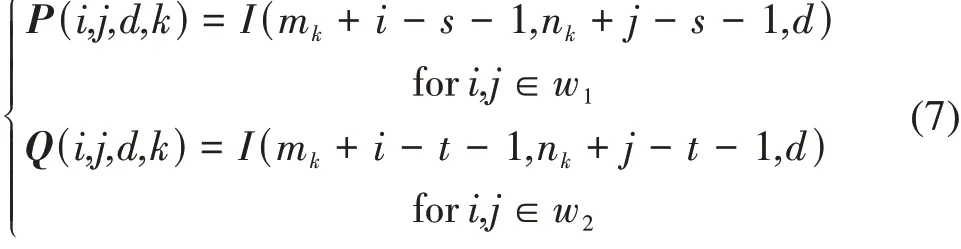
令fr,d,k表示大窗口提取的纹理特征,hr,d,k表示小窗口提取的纹理特征,共计算了5种类型的纹理特征。
其中,f1,d,k和h1,d,k表示数据范围:
f2,d,k和h2,d,k代表均值:
f3,d,k和h3,d,k表示方差:

f4,d,k和h4,d,k表示熵:
f5,d,k和h5,d,k表示偏斜:
2.2 多样性特征融合
设纹理特征表示:

式 中,xspa(i,d,w1)和xspa(i,d,w2)分 别表 示窗 口w1和w2提取的遥感影像第d个波段的第i个纹理特征。
将遥感影像植被指数变化信息和纹理信息进行结合,构成多样性融合特征,先对Xspe和Xspa进行如下变换:
式中,Xˉspe(i)和Xˉspa(i)分别代表列均值,σspe(i)和σspa(i)分别表示列方差,下标(j)代表按列操作。多样性特征结合方式可以表示为

2.3 集成分类模型训练
针对维度诅咒与过拟合问题,本文提出了基于特征分离的旋转森林改进方法,通过使用具有低维度旋转特征的数据集来训练多个独立的分类器,并利用包外估计精度选择高质量的基分类器来构建最终的集成模型,从而进一步提高遥感影像的分类精度。设数据集为S=[X,Y],假定X=[x1,x2,…,xL]T为训练样本集,其中每个样本xl含H个特征数,Y=[y1,y2,…,yL]T表示样本集所对应的类标签,yl∈{1,2,…,C},C为类别总数。假设T1,T2,…,TI代表I个基分类器,则基于特征分离的旋转森林(Feng等,2020)改进算法的分类步骤如下:
(1)将包含H个特征的训练集随机划分为G个子特征集,则每个子特征集包含个特征,特征子集St,g由U个特征构成。如果T是G的整数倍,则直接进行进入一个步骤;否则,令T=T+T%G,转到步骤(2)。
(2)对St,g中的样本进行75%的重采样,产生一个样本子集S′t,g,利用主成分分析(PCA)计算出S′t,g的主成分系数at,g,令用新的训练样本集S′′t,g训练基分类器ςi,g。
(3)计算基分类器包外估计的精度(Feng等,2020):

式中,SOOB表示在构建样本子集时未被抽取的样本数据,L′表示SOOB中的样本数量,当OOB(ςi,g)大于50%时,将基分类器ςi,g加入集成E中。
(4)重复以上3个步骤T次,得到最终的集成分类模型ς。
(5)设Pi,g(xl)表示基分类器ςi,g预测样本xl属于c类别的概率,则样本xl属于c类别的置信度(Feng等,2020)为:

用最大置信度来预测样本xl所属类别。
3 实验数据与参数设置
3.1 实验数据
本文选择的研究区域为法国内泽尔森林,其占地约81 km2,种植了大量的松树,位于法国西南部的大西洋海岸附近。2009年1月24日,Klaus风暴席卷法国西南部造成了严重危害(National Inventaire Forestier National,2009),图1是风暴前后的Formosat-2卫星遥感图像,其分别拍摄于2008年12月22日和2009年2月4日。图像的分辨率为8 m,包含4个光谱波段(红、绿、蓝、近红外),图像经过了正射校正和地理校正。该数据集的样本来源于实地调查,实验时使用到的训练样本与测试样本数目如表1所示。

表1 样本数目Table 1 The number of sample

图1 法国内泽尔森林Fig.1 Nezer forest
3.2 实验设置
本实验所用到的分类方法在MATLAB平台上实现,所用的电脑处理器为Inter(R)Core(TM)i5-10200HCPU,主频2.4 GGHz,16 GB内存。设本文所提的基于特征分离的旋转森林改进方法包含10个基分类器,每个基分类器表示一棵决策树。选择的分类对比方法为旋转森林算法,设该算法决策树的个数为10,为了体现所提算法的优越性,本文设置了如下对比方法:
(1)F1表示用旋转森林算法对遥感森林影像的4个光谱特征进行分类;
(2)F2,F3,F4分别表示用旋转森林算法对单一窗口大小为5×5、7×7、9×9提取的纹理特征进行分类;
(3)F5表示用旋转森林算法对2.1中的复合窗口技术提取的纹理特征进行分类,其中复合窗口的大小设置为7×7和9×9;
(4)F6表示利用所提出的基于特征分离的旋转森林改进方法对数据的4个光谱特征、ΔNDVI与ΔEVI组合的特征进行分类。
(5)F7表示利用所提出的基于特征分离的旋转森林改进方法对2.2中计算得到的多样性融合特征进行分类,其中多样性融合特征由遥感影像的纹理特征与森林植被指数变化特征ΔNDVI与ΔEVI构成,纹理特征通过2.1.1中的复合窗口技术提取,且窗口大小为7×7和9×9。
3.3 评价标准
本文使用4个常用的评价指标对分类器的性能进行评估,将测试集xk在分类模型T上进行测试,且其真实标签为yk,分类模型T表示训练好的旋转森林模型或训练好的基于特征分离的旋转森林改进模型。
(1)总 体 分 类 精 度OA(Overall Accuracy)(Tarabalka等,2010)为

式中,L表示训练集的样本数目。
(2)Kappa系数(Tarabalka等,2010)表示为:

(3)每 一 类 地 物 的 分 类 精 度(pcA(c))(Tarabalka等,2010)为:

式中,Lc={k∈L|yk=c}。
(4)平 均 分 类 精 度AA(Average Accuracy)(Tarabalka等,2010)表示成:

4 实验结果与分析
本实验分别运用了不同方法F1、F2、F3、F4、F5、F6、F7对内泽尔森林的变化情况进行监测。首先,利用了表1中的训练与测试样本数目对以上7种方法的分类性能进行评估,在4.1节中展示了不同方法的总体分类精度、Kappa系数、单类精度以及分类结果图;另外,本实验还测试了各类方法所提取的特征对训练样本数的敏感性,在4.2节中展示了其结果。
4.1 算法性能对比
表2展示了在内泽尔森林数据集上不同方法提取特征对森林变化检测的总体精度(OA)和Kappa系数。当使用了纹理特征时,可以从表2中观察到其整体性能的提高:F2、F3、F4、F5、F7的性能均优于F1和F6;与F1相比,F7总体精度提高了3.68%,Kappa系数提高了5.82%;对于单窗口,分类性能随着窗口的增大而先增后减,在F3(7×7窗口)性能达到单窗口特征提取方法的最优值;与F3相比,使用了本文设计的复合窗口(F5)后,总体精度提高了0.72%,Kappa系数提高了1.58%;当运用了多样性特征集合协同模型(F6),相比于单一窗口(F3),总体精度提高了1.04%,Kappa系数增加了2.09%;F6在光谱特征的基础上加上森林植被指数变化信息即ΔNDVI与ΔEVI后,其总体分类精度与Kappa系数比只使用光谱特征的F1高;与F5相比,引入了森林植被指数变化信息即ΔNDVI与ΔEVI后,多样性特征F7的总体精度提高了0.43%,Kappa系数提升了0.51%。实验结果表明,通过引入森林植被指数的变化特征以及基于复合窗口计算的纹理特征,本文所提出变化检测方法可以获取更高的分类精度,能够增强对森林变化的监测能力。

表2 整体分类性能Table 2 Overall classification performance
表3分别显示了7种方法的对森林变化与未变化区域的监测性能,由于本文重点研究森林的变化情况,因此该表中主要展示了变化和未变化区域的检测精度及所占面积。当使用了纹理特征(F2,F3,F4,F5,F7)时,对森林变化区域的检测精度比仅使用光谱特征(F1和F6)要高;当窗口大小增加到为7×7时(即F3)达到单窗口特征提取方法的阈值;与F3相比,使用7×7和9×9的协同窗口提取的纹理特征(F5)分类,对变化地物的检测精度提高了0.83%,对未变化地物的精度提高了0.13%;相比于F3,本文的基于多样性特征协同算法(F7)对变化地物检测精度提升了1.12%,对未变化地物的检测精度提升了0.6%。相比与F1,本文的基于多样性特征协同算法(F7)对变化地物检测精度提升了6.53%,对未变化地物的检测精度提升了3.46%。法国内泽尔森林的总面积约为81 km2,根据本文所提算法所计算出来的未变化面积仅为17.10 km2,而因风暴灾害而受损变化的面积高达42.89 km2。实验计算结果表明内泽尔森林在遭受风暴袭击后,一半以上的森林区域遭受破坏。图2展示了内泽尔森林对上述7种方法对内泽尔森林监测结果,其中,变化区域和未变化区域分别以蓝色和绿色显示。从图2中可以看出,随着所运用的特征越丰富,方法的性能不断提高,结果图的噪声点随之减少,对森林变化的监测能力也随之增强。
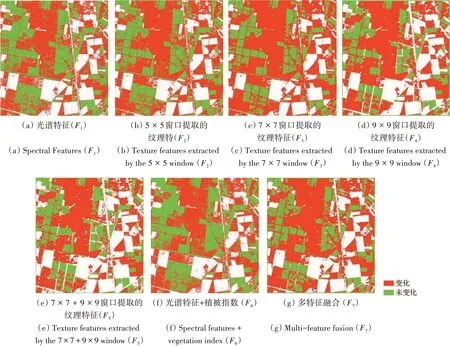
图2 分类结果图Fig.2 Classification results
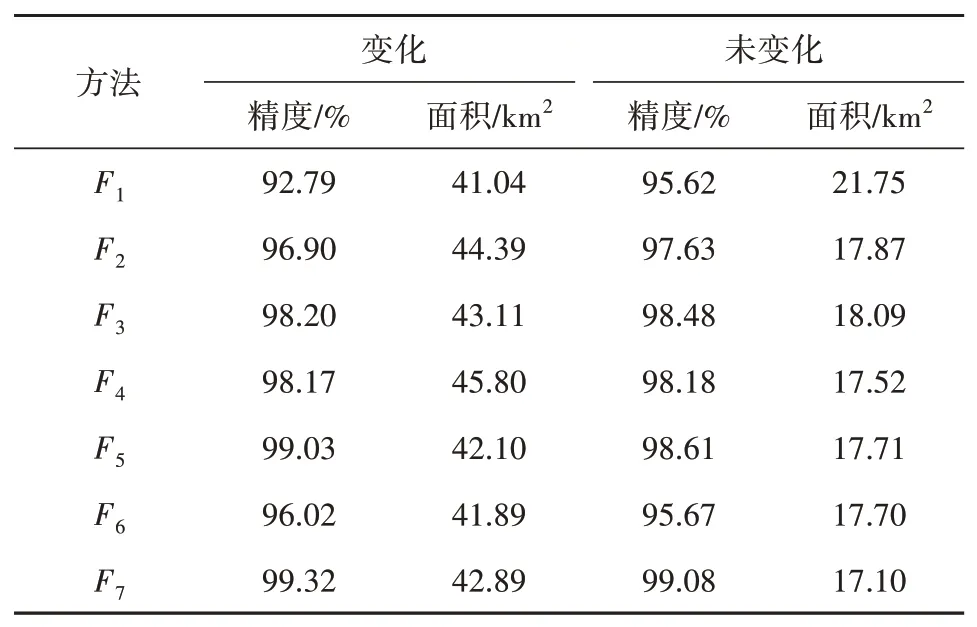
表3 算法单类别精度对比Table 3 Algorithm single-class precision comparison
4.2 算法对训练样本数目的敏感性测试
本文测试了不同方法提取的特征在内泽尔森数据中对训练样本数目的敏感度,图3中分别展示了整体分类精度(OA)、Kappa系数和平均分类精度(AA)随训练样本数目的变化趋势。从图3中可以看出,在不同的训练样本之下,基于多样性特征协同技术(F7)的整体分类精度、Kappa系数和平均分类精度等性能指标均优于其他方法,在训练样本数目达到50之后,精度变化趋于平缓。本文方法通过多样性特征集合协同模型进行特征融合,并使用新的旋转森林改进方法,使得新方法在不同的训练样本数,仍然保持较高的分类精度。
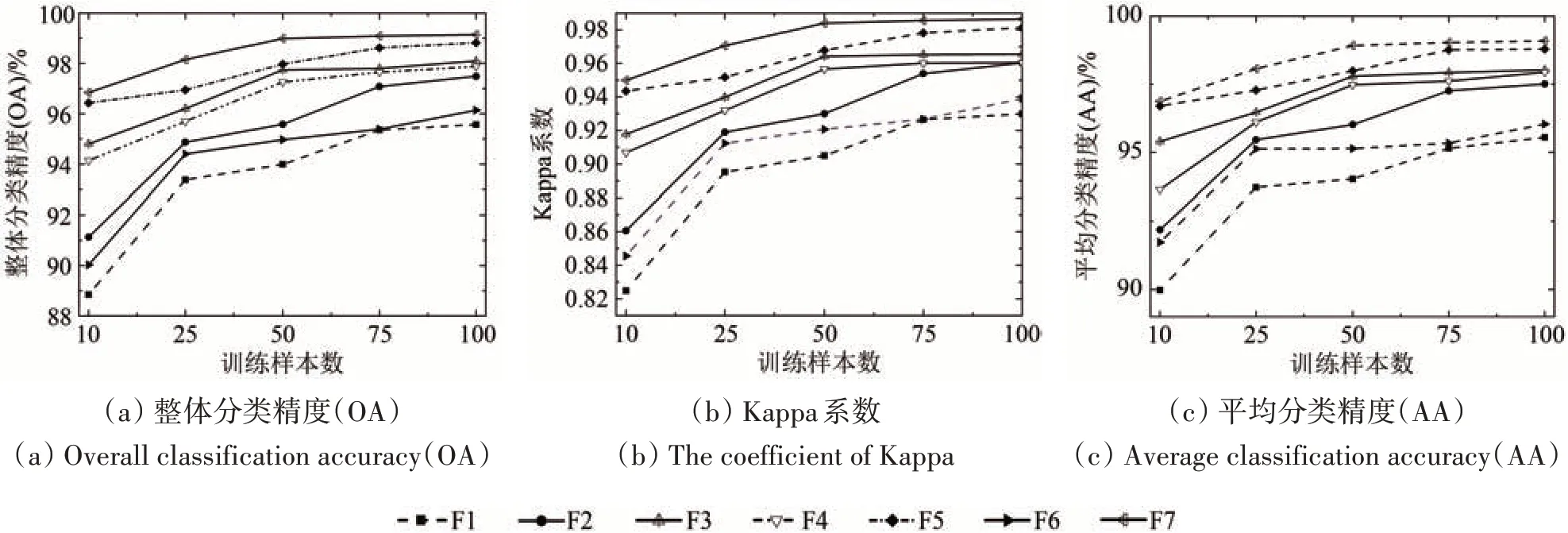
图3 不同方法对训练样本数目的敏感度Fig.3 Sensitivity of different methods to the number of training samples
5 讨论
在本文中,提出了一种新的基于多样性特征协同技术的飓风前后森林变化遥感监测方法,在内泽尔森林数据集上的结果证明了该方法的有效性。
(1)根据不同的窗口大小计算了四种纹理特征。表2的结果表明,与光谱特征相比,纹理信息有助于提高对森林变化区域监测的准确率。这是因为图像的纹理特征包含了关于地物的空间信息。在传统的基于像素的森林变化检测方法中,是根据其像素值分别进行分类,不包含空间信息。例如,Zarco-Tejada等(2018)利用高分辨率高光谱图像和Sentinel-2A影像检测森林衰退情况;Bar等(2020)利用中分辨率光学卫星数据检测北阿坎德邦喜马拉雅地区森林因火灾而发生的变化情况。当只利用遥感影像的光谱信息进行变化检测时,错误率通常较高原因是:(1)某些类的光谱特征相似,(2)类之间边界处可能存在多类地物的像素(Peña-Barragán等,2011);而现有研究表明,纹理特征在森林变化监测具有重要作用(Wu等,2011;Kulkarni,2004)。
(2)窗口的大小对于纹理特征的提取是至关重要(Franklin等,2000;Garcıˊa-Sevilla和Petrou,2001)。为了找到最优的单一窗口大小,使用不同的窗口大小计算纹理特征,包括5×5、7×7、9×9。应用旋转森林分类算法对不同窗口提取的纹理特征进行分类,从表2中可以看出,当纹理窗口大小为7×7(F3)时,Kappa值和整体精度最高。这是因为窗口太小,例如5×5,会导致在同一种纹理的内部出现误分割,影响纹理提取的准确性;窗口太大,则会在纹理的边界区域出现空间信息噪声,导致边缘效应,影响遥感图像分类的准确性(Puissant等,2005)。最优窗口大小是保证总体精度不下降和使用足够小的窗口尺寸来减少边缘效应这两者的折衷,当实验所使用的窗口大于7×7时,分类精度开始下降,因此7×7为 最 优 窗 口。Murray等(2010)和Puissant等(2005)也使用了7×7的窗口大小来提取纹理特征,证明了该窗口大小对于纹理信息的准确提取具有优势。
(3)虽然相比于光谱特征,单一窗口提取的纹理特征有助于提高性能,但窗口大小和空间信息含量难以平衡,该方法没有充分考虑不同对象的尺度。本研究将性能最优的两个窗口(7×7和9×9)组合在成为复合窗口时,整体分类精度、Kappa系数和单类别分类精度均有显著改善。这是因为复合窗口不仅包含了更多的信息,而且可以精确地找到相邻区域之间的边界位置。
(4)本研究将复合窗口(7×7和9×9)提取的纹理特征与森林遥感影像的植被指数变化信息结合,构成多样性融合特征,并利用基于特征分离的旋转森林改进方法对其进行分类,获取森林的变化情况,该方法得到的监测精度比其余6个对比方法有明显提高。这是因为所使用的多样性融合特征包含了遥感影像的空间信息与植被指数变化信息,能够获取影像更丰富的细节信息,可以有效提高对变化区域的检测能力(万亮等,2020)。例如,董丽萍等(2017)提出了基于光谱特征和纹理特征相结合的变化检测方法,并选取优化土壤调节植被指数进行建设用地信息提取,实现了土地变化高精度检测,证明了多特征融合在变化检测中的性能。此外,使用所提的基于特征分离的旋转森林改进方法能够避免维度诅咒与过拟合,进一步提高对森林变化的监测性能。
6 结论
本文基于Formosat-2卫星遥感影像,以法国内泽尔森林为研究区域,针对基于遥感技术的森林变化监测进行研究。本文提出了基于多样性特征协同技术的飓风前后森林破坏遥感监测方法,该方法首先计算出森林遥感影像变化前后的归一化植被指数差值和增强植被指数差值,并提出了基于复合窗口技术的来提取纹理特征,然后建立了多样性特性结合模型,并提出了一种基于特征分离的旋转森林改进算法来提高分类性能。实验结果表明,相比于传统方法,本文算法在该研究区域的整体精度、对变化区域和未变化区域的检测精度至多分别提高了3.68%、6.53%和3.46%。
相对传统的基于光谱特征和单纯的纹理特征的变化监测方法,本文所提出的复合窗口技术在提取纹理特征时,可以兼顾空间信息含量与纹理边界的准确性,从而提取遥感影像更丰富的空间信息,此外本研究所提出的多样性特征结合模型有效地融合了影像的光谱与空间特征,通过增加特征的多样性实现了森林变化检测性能的提升。因此,本研究工作可以应用于森林变化监测与森林灾害评估中,有效提高森林变化监测的能力,具有较高的实用价值。
本研究区数据选取基本无云,由于森林变化区域的识别会受影像分辨率与天气等因素的制约,因此本方法在多云天气下森林变化监测应用效果还有待进一步验证。
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31 08:58:30
河北地质(2021年1期)2021-07-21 08:16:12
软件(2020年3期)2020-04-20 01:45:18
中国生物医学工程学报(2019年5期)2019-07-16 07:56:46
摄影之友(影像视觉)(2018年12期)2019-01-28 09:01:00
电子制作(2018年11期)2018-08-04 03:25:38
中南林业科技大学学报(2017年12期)2017-12-19 06:32:55
Coco薇(2017年8期)2017-08-03 15:23:38
测绘科学与工程(2016年5期)2016-04-17 06:51:15
Coco薇(2015年5期)2016-03-29 23:22:15