汽车操纵稳定性的研究
2022-10-14 08:53莫小琴叶家明
现代信息科技 2022年16期
莫小琴,叶家明
(三亚学院,海南 三亚 572022)
0 引 言
20世纪以前,关于汽车的操纵稳定性,工程师很少对其进行深入的研究。20世纪30年代是汽车研究历史上一个重要的分水岭,其后开始对汽车操纵稳定性进行深入研究,并从中得到了许多成果,使得后来的汽车发展进步如有神助,其发展过程主要可分为四个阶段:
第一阶段:早于20世纪30年代。20世纪初,专家们专门研究了汽车车轮与路面接触的悬架设计。该设计的初衷是确保行车中底盘与路面的直接接触。使得悬架的设计符合转向控制的需求。20世纪30年代,出现了汽车研究历史上的一个重要分水岭,人们对车辆控制研究的重视程度无可比拟,其中包含静态悬架的重新解构设计,并于1925年对动力学的原理做出大胆假设。这一时期,Broulheit对轮胎角度偏转的设定提出了自己的质疑和观念。
第二阶段:20世纪50年代之前。这一阶段中,英国的Lancheste和美国的Olley开发出单独可拆卸的车辆悬架,优化了汽车的乘坐体验且维修成本下降,使得人们对汽车结构的认知有了新的突破。这一时期多个学者对轮胎横向力学有了许多新的观点,20世纪30年代后,Becker,From和Maruhn针对轮胎在转弯过程中发生的特殊形变刊登文章,引起了多方的思考性。1934年,奥利首次提出速度作为衡量汽车的一个重要指标,并基于现有的研究成果对汽车轮胎材质的特性进行了研究。
第三阶段:从20世纪50年代初期到70年代。1956年,William通过研究对汽车稳定做了进一步的研究和设计,他的研究结果为车辆的理论基础提供了支撑,时至今日这一理论仍是汽车研究的根本。这一时期Milliken指出现有的结果仍需大量的实验检验其正确性,然而当时由于实验条件的受限人们无法做出更进一步的突破。随后在Whitcomb的研究下,从自由度的研究出发首次引入了多自由度底盘设计的概念。
第四阶段:20世纪70年代以后。自20世纪中期,随着网络的快速发展,在软件中可以更好地整合操作系统安全数据。在车辆中发展“动画”的游戏越来越复杂,也越来越现实。这一阶段中,开发工程师有了人与汽车进行互通的想法和观念,编译代码使得汽车上有了简易的智能助手端,为汽车的操作提供更多可能性。
在中国,对车辆可操纵稳定性的研究直到20世纪70年代才开始。清华大学首先开始了这一领域的研究。许多生产工厂也面向产品的需求。在各个方面对车辆的稳定性进行了试验和研究。
自1981年以来,郭孔辉教授针对汽车不相关的特性进行了深入的研究,在多种影响因素的测定下对汽车的综合性能做出评估,作为一辆优秀的汽车,其规定综合指标的系数值应大于0.99。20世纪90年代,郭孔辉教授发表了明确的指标,对各术语的总体方差进行了评价,并通过频率统计分析,对闭环系统的主动安全设计进行了综合评价和优化。
1 悬架系统动力学仿真理论
多体系统动力学是研究多体系统运动规律的一门专业学科,包括两种动力学:刚性多体系统动力学和柔性多体系统动力学。多个系统通常由几个灵活和刚性的对象连接在一起,在其成长阶段,多方助力使得其能够持续见涨,充分利用了生物、机械、空间等知识体系,使得其底蕴越发壮大,系统动力学有了更多地涉足领域,以下介绍几种主要的研究方法。
1.1 牛顿-欧拉方程
当牛顿-欧拉方程用于描述单个刚体为隔振器时,由于铰链厚度的增加,未知变量的数量明显增加;由此,开发一种计算机识别刚体连接和铰链的程序化方法,并自动消除铰链的约束。这种方法的特点是,将非独立的笛卡尔广义坐标在列举完整系统中的牛顿-欧拉方程后转化为自变量,并通过使用有限元法消除完整系统的限制性反应原则;以及利用Jordan原理消除非完整系统的约束反作用,得到了具有相同自由度的动力学方程自由。
1.2 拉格朗日法
由于多层体系统的复杂性,用系统的拉格朗日法坐标建立系统的难度是非常大的。使用系统的一般笛卡尔坐标更合适。基于现有的二维或三维空间体系,乘子拉格朗日方程不同于原先的拉格朗日方程,引入乘子这一变量,其代表的是微分方程。导出的动力学方程给出了相同的结果。它们必须由一般的闭坐标、代数方程来完成。1973年,美国密歇根大学等多所研究机构使用集耳非柔性积分算法,对其求解效率进行了拔高,亚达算法初具模型;戴马斯算法诞生于1977年,Edward等人基于坐标的细化提出设想,在该算法的基础上诞生了现有的应用最为广泛的动力学软件——ADAMS动力学自动化软件。
1.3 图论(R-W)方法
在小罗伯森和比尔格的奇思妙想下,首次将建筑系的知识与动力学结合,以及用一些基础概念和数学工具来叙述系统中刚体之间的关系。RW这种方法需要一个非常优美的正方形边缘。多阶段木质车身系统提案结构用于无木体系,应采用吊线或刚体截面将其转换为木体系,R-W法的与众不同之处在于其以相对位移为核心变量设计整体的数学框架,运动方程迅速兴起。
1.4 变分法
经典力学是对现有事物抽象的描述,原先科学技术的落后导致人们无法对较大的数据进行计算,导致存在一定的思维漏洞,但科学技术的进步使得原先不可能实现的变分法变为现实,数据计算不再是阻拦力学发展的拦路虎,这是解决动态规律的有效途径。在工业生产中,动态分析是检验合格化的标准之一,控制系统的设计更为细致,由于变分法与铰链的个数无关,因此它特别适用于多锁环复合物系统。原理高斯最小极限是不同方法的基本原理。采用最优化理论,运动数据可以直接从功能端得到。在此理论研究下,微分方程被忽略不计,减少了求解所需的计算量,并且可以与最优控制理论完美相叠加。
2 多体系统动力学建模与求解过程
多体系统动力学的流程主要包含两部分:建模设计与仿真分析,其中建模设计利用物理和数学的思维逻辑进行研究,物理模型是根据几何模型设计模型,数学模型是在物理知识的基础上衍生出模型。利用简单的几何原理即可推导出系统整体的动态特性,在动态特性研究中或从一般几何模型中导入。物理模型元素,例如:运动限制、驾驶限制,在几何模型中加入动力元件和外力或外力矩,形成物理模型来表达系统的力学性能。物理模型利用笛卡尔坐标系或Josephlouis-Lagrange坐标系。基于系统运动方程的系数矩阵自动生成系统数学模型;系统的数学模型应分为动力学模型和动力学模型。静态平衡法或求解能力动态分析的逆求解对问题的结果进行逼近,再一次次逆求解,结合结果对设计目标进行对比验证,并回馈给物理模型或几何模型的选择,最终得到最完美的设计结果。
2.1 基于ADAMS悬架系统建模
研究目的在于整改车辆参数标准值,不同于固有的开发过程,需要进行数以万计的整改和测验。利用ADAMS软件建模是为了方便参数的整改,减少开发周期,控制成本,提高质量,得到最优的方案。动态仿真与实验研究相结合,深入研究ADAMS动态模拟系统,结合汽车产品开发项目进行动态模拟,进行汽车动态稳定试验。麦弗逊式悬架是独立悬架中的一种,车辆的前桥多数用的是麦弗逊式悬架。简单来说,麦弗逊式悬架的组成有螺旋弹簧、减振器和控制臂,减震器的作用是限制弹簧,使弹簧只能根据指令的方向运动。麦弗逊式悬架和别的悬架系统相比较有以下优点:结构简单、紧凑、体积小,其性能指标数值达到最高,故多在前驱式的汽车上见有麦弗逊式悬架的身影。虽然麦弗逊式悬架的优点多,但也有缺点,缺点是左右冲击缺乏阻挡力,制动阻力不足。
为确保系统的减震器增加使用寿命,中部位置的中心减振器和弹簧中心不会在同一条线上,这种结构导致麦克弗森式悬架系统和其他悬架系统的运动规律完全不同。对mcferson型单一前悬架进行系统原理验证,在舍去不必要的外部影响因素后得到的动力学模型如图1所示。
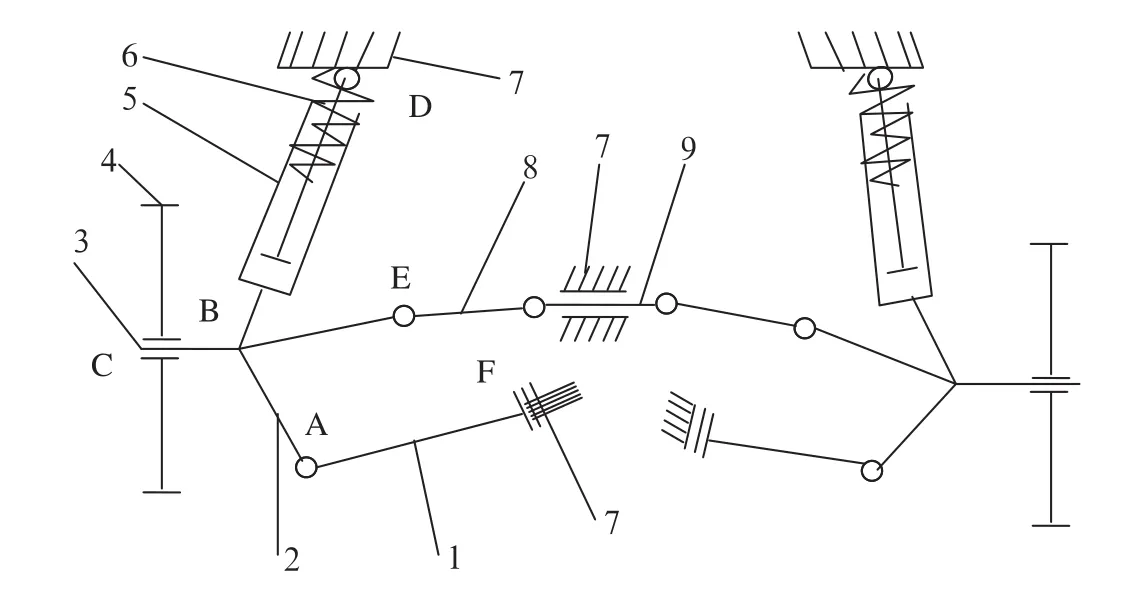
图1 麦弗逊前悬架结构简图
通过空间坐标系内的落座点即可进行前轮的位置确定,如式(1)至(4):
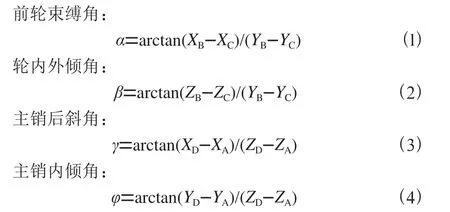
式中:A为操作臂与各个连接控制点;D为减振器与车体的铰接点;B、C分别是轮轴内外端点。
2.2 悬架模型自由度分析
通过对设计模型进行简化设计,悬挂系统比以往更轻,性能更好。具体如表1所示。
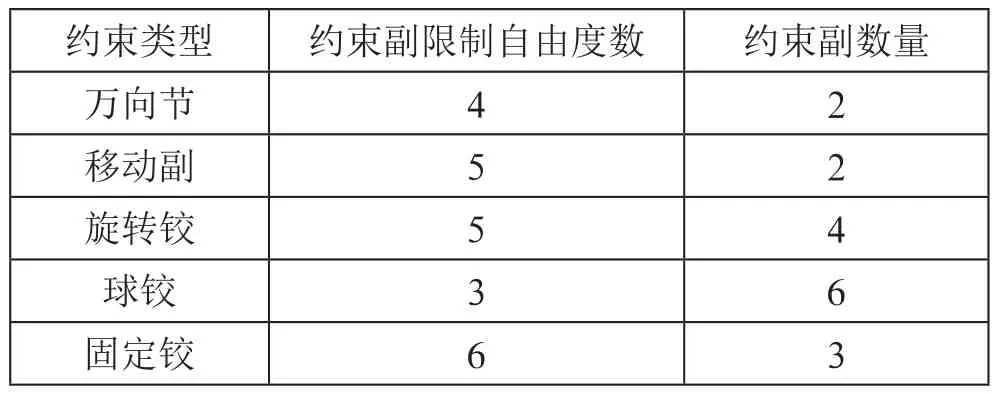
表1 前悬架各约束副类型和数目
由式(5)可得整体的自由度:

式中:为活动构件总量;p,为约束边界及运动下限制;R为其他约束边界。
在此基础上获得的整体自由度计算为:

通过计算本文设计的悬挂系统的自由度为4,四个车轮和主梁可以进行转动。
3 基于ADAMS的动力学仿真
3.1 车轮同向激振仿真
3.1.1 车轮外倾角
为了防止车轮过多转动或旋转,一般轮胎在50 mm的范围内工作,外倾角的变化小于1°。当悬挂系统模型在静力平衡时,外倾角为-0.333 3°,图2表示的是车轮在行驶进程中转角变化的角度分布。在本文设计的悬挂系统下,车前轮转角的值在-1.37°~1.21°之间。在行车遇到坑洼地面的情况下,车轮前外倾角会变得更加合理。
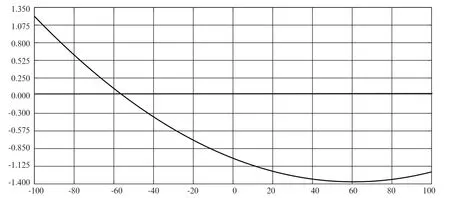
图2 同向跳动前轮外倾角变化曲线
3.1.2 车轮前束角
在汽车运动进行时,前束角并非保持恒定不变,每次的转换都会对来复式的运动造成影响,轮胎受到的来自地面的摩擦阻力逐渐增加,轮胎磨损程度加剧。针对这一现象,应在合理范围内保证前束角数值的最小化。这个模型的VMS的静力平衡时,夹角为0°。图3中前轮前束角变化率为-4.2°至0.33°,和理想的数值存在较大程度的偏差。

图3 同向跳动前轮前束角变化曲线
3.2 车轮弹塑性运动仿真
3.2.1 车轮外倾角
与同步车轮受迫模拟原理类似,结合工程质量标准将实验初始激励保持在100 mm。运动学分析模式切换到时尚,符合更换轴箱的刚性约束机制、橡皮筋和所有其他条件和参
图4显示了外部倾角作为车轮均匀运动函数的变化规律曲线。根据输出模拟结果,可以看出,倾角的变化范围为-124°~120°,在车轮运动时,外倾角的变化略高于期望值。数保持不变,车轮定位参数的分析及其他特点,暂停了后轮的视运动期间,向上和向下移动悬架系统。
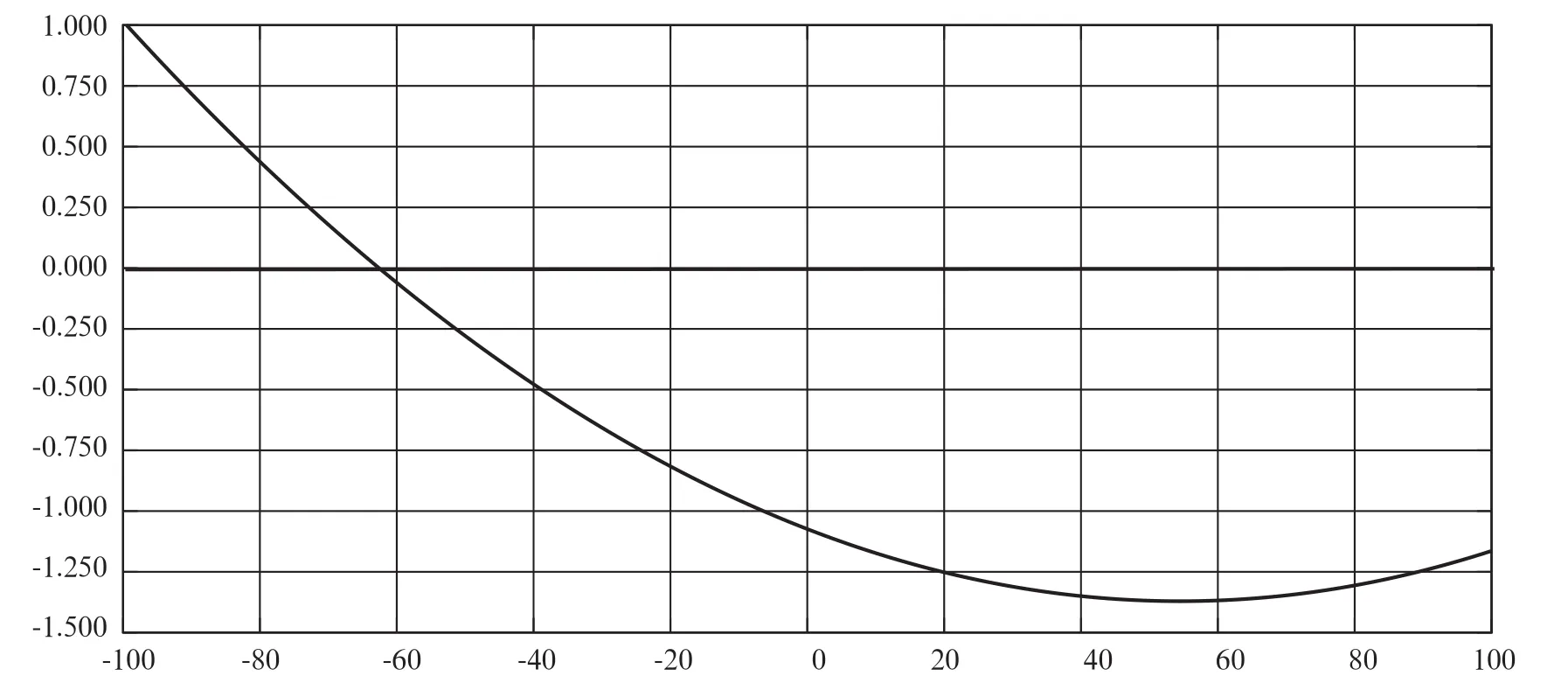
图4 同向跳动前轮外倾角变化曲线
3.2.2 车轮前束角
图5为前轮前梁角度作为车轮位移函数的曲线。前束的角度在4.15和0.62之间变化。当车轮运动时,前照角度的参数值变化区间高于理论的参数值。
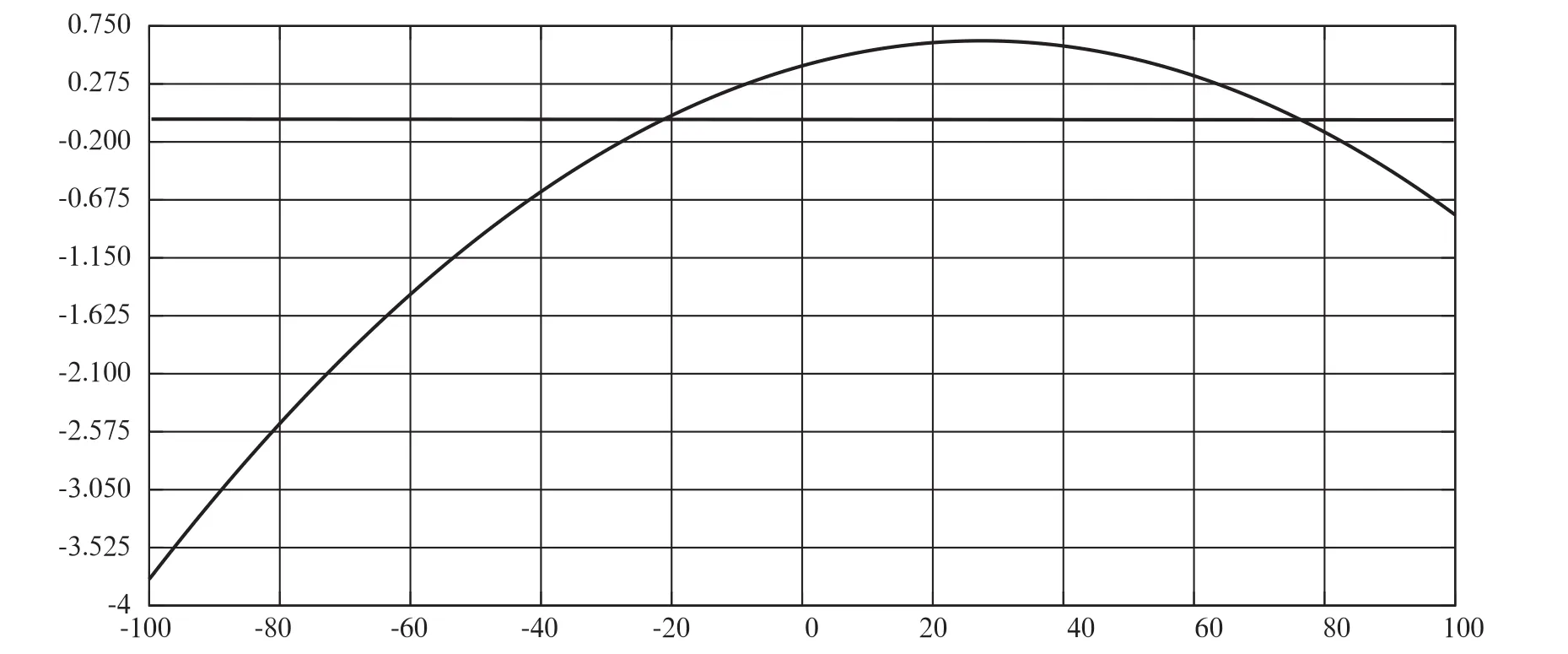
图5 同向跳动前轮前束角变化曲线
4 结 论
根据ADAMS-虚拟样品技术,对Macpherson型前独立悬吊系统的性能指标进行衡量,使得汽车开发周期缩短的同时更能保证产品效果,实现双重的便捷性。使用ADAMS设计和分析了前独立的麦弗逊虚拟挂车的悬挂结构。对设计的汽车悬架结构进行了软件的仿真和模拟,并在不同条件下进行了相应的测试。仿真表明,在弹性塑性限制下,主销内倾角、车轮束前角大于固体运动时的倾角。
猜你喜欢
时代汽车(2022年14期)2022-07-06
汽车实用技术(2022年12期)2022-07-05
汽车实用技术(2022年10期)2022-06-09
时代汽车(2021年1期)2021-03-03
科学大众·小诺贝尔(2021年10期)2021-01-22
智富时代(2018年1期)2018-03-26
智富时代(2018年1期)2018-03-26
中学生理科应试(2017年7期)2017-08-09
中学物理·高中(2016年8期)2016-08-08
速读·中旬(2015年10期)2015-10-21