
盆栽智能底座的设计与制作
2022-10-12 12:41刘云瑞郭德伟张文斌
红河学院学报 2022年5期
江 洁,张 森,刘云瑞,闵 洁,郭德伟,张文斌
(1.红河学院:a.工学院,b.云南省高校高原农机机电一体化技术研究与应用工程研究中心,云南蒙自 661199;2.昆明理工大学材料科学与工程学院,云南昆明 650031)
盆栽极大地丰富了人类的精神生活,在生活节奏飞快、人们压力激增的当下,盆栽越来越多地进入到人类日常生活中,成为生活的日常所需。目前盆栽培育优劣程度,过度依赖于栽种者的养殖护理经验和专业知识,特别是对于植物至关重要的光照因素,一旦掌握不好会造成植物死亡[1]。这些都给普通盆栽爱好者栽种盆栽带来了极大的不便。依靠智能化的手段辅助种好盆栽无疑成为研究的热点[2-4]。2015年,李武云等设计了一种能够适时检测土壤湿度、环境温度的智能花盆。2019年逯文杰等设计了一种基于STM32的智能花盆机器人,主要基于MDK5.25软件开发平台检测了寻光、避障、浇水、防跌落、蜂鸣提示等功能[5]。2017年,舒方强对智能家居中的盆景控制系统进行设计,采用Arduino单片机作为主控制器,将盆景的植物层和动物层有机结合在一起,并通过乐联网平台实现了远程监控。目前此类产品的研究多集中在控制算法的设计,花盆本身的智慧功能方面,存在多种盆栽适应性差,缺少实际样机试验等问题。
为此本文提出一种智能盆栽底座的设计方案,通过样机实验,能够解决阳台型绿植的养护问题。能够监测盆内的土壤湿度,环境温度,通过内部控制对比温湿度来提示人们是否浇水。检测光照强度实现追光运动。
1.设计方案的选择
根据全向轮的布局方式,本文初步拟定了两种方案,选择较为合理的方案运用在盆栽智能底座中。
1.1 三轮移动平台布局方案
三轮配置驱动机构[6],主要是一个全向轮和独立平行双轮驱动的三角布局方式,其转向原理是靠两个独立驱动电机的差速转动或者反向转动,但是这种方式只适用于平坦路面,因为全向轮自由度较多,所以运动方向不固定[7],转向不精确。采用三轮配置的移动平台对于地面有三个接触点,可以保障其约束在世界坐标系X-Y平面上无晃动。但在转向过程中,尤其考虑到本次设计盆栽底座的通用性,放置多个盆栽或盆栽放置不在底座质心时,更加容易侧翻。三轮布局如图1所示。
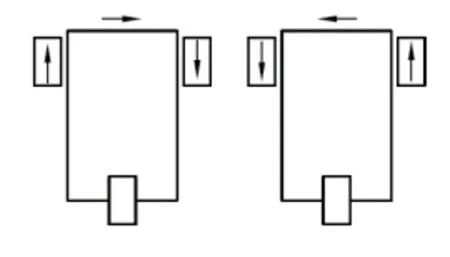
图1 三轮布局方案
三轮移动平台中,结构、控制动力简单。三点确定一个平面,即便在不平地面,也能够实时保持与地面的可靠接触。但通过差速实现转向,转向不精确,前进行程过大。并且在转向过程中,又因为三个支撑点造成的质心问题,容易发生侧翻。
1.2 全向四轮移动平台布局方案
在车轮布局上,常见的有车轮左右对称分布,交叉对称分布和十字对称分布;驱动方式有独立四轮驱动、两轮驱动。后两种车轮布局方式一般应用于全向轮四轮独立驱动方案,最终以实现全方位运动的能力。两者都可以实现原地转向的功能,且弥补普通移动平台转向前进行程过长长的缺陷。具体如表1所示。
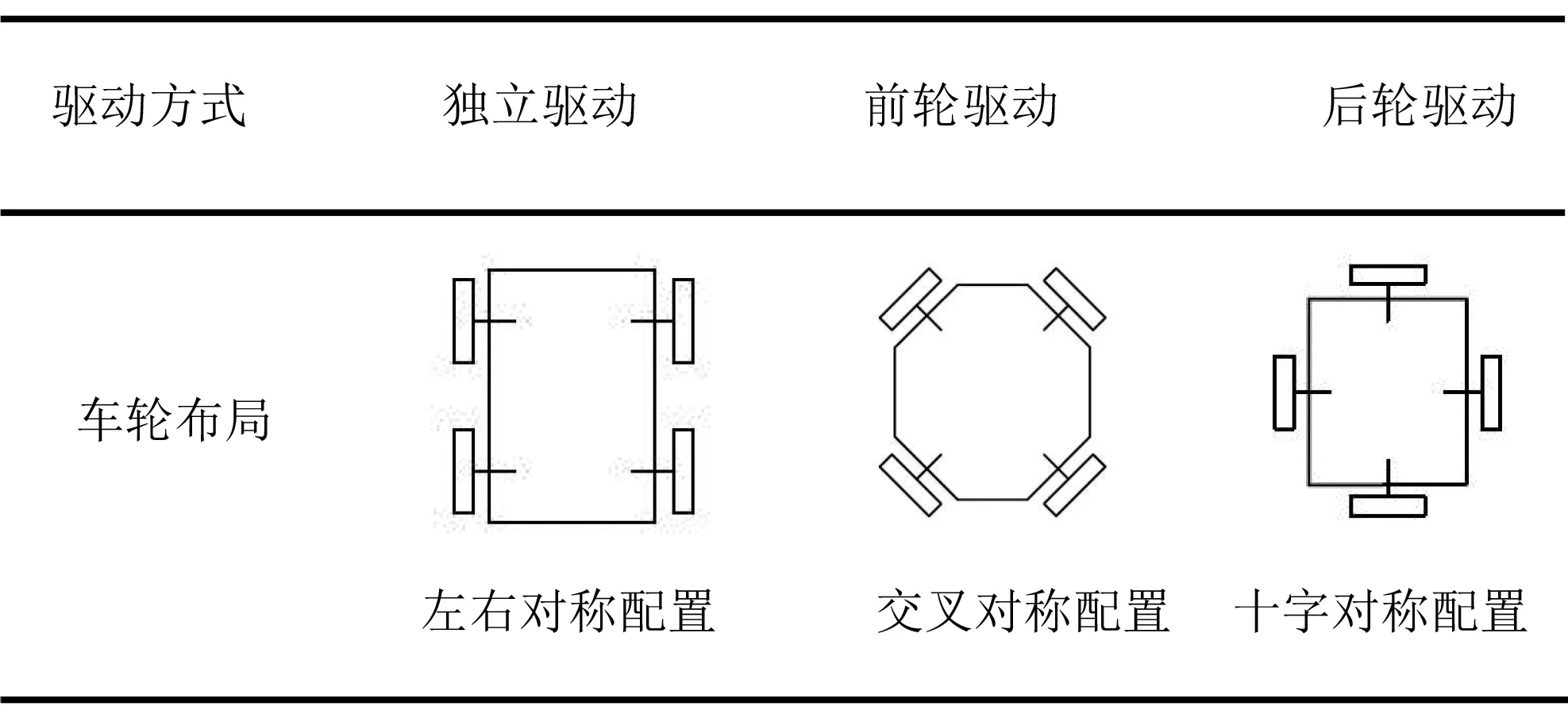
表1 全向四轮移动平台布局方案
综上分析,选择四轮交叉对称配置的四轮驱动方式,控制方法相对简单,不用速度合成矢量计算。由于应用环境地面的光滑,四轮机构能够均匀着地,不会出现晃动,移动过程能保证平稳性。即便搭载的盆栽偏质心放置也不会出现三轮平台所出现的侧翻状况。采用全向轮可实现原地转弯,弥补转向运动需要一定前进行程的缺点。由于本次设计对尺寸要求不高,在阳台平滑环境运动,载重不大,采用四轴直流电机传动,四轴十字对称分布配置结构方案。
2.系统关键零部件的设计
2.1 电机的选择
对于移动平台,其工作时的运动路径是不确定的,针对运动条件及环境,以锂电池来为其提供能源,是考虑到设计盆栽底座载重不大,运行要求不高。选用直流有刷电机。它的优点有结构简单,启动快、制动及时、控制电路相对简单;使用成本低等方面。电机参数如表2所示。
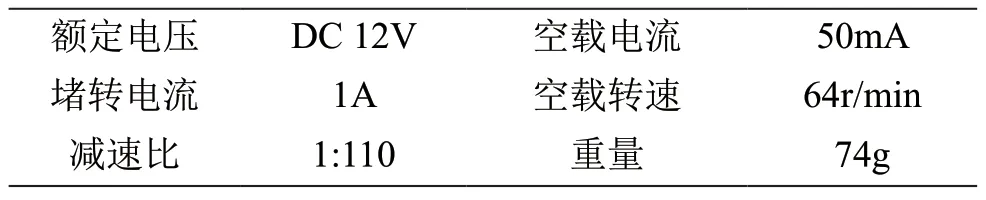
表2 电机参数
2.2 电机支座的设计
电机作为整个底座的传动部分,有一个稳固的支座是必须的,根据选择电机的具体尺寸和安装预留孔位置,设计的电机支座尺寸如图2所示:
2.3 底座机架的设计
底座根据需要搭载的托盘具体尺寸,电机支架预留孔位置,考虑到该机器于室外运动,不封装电子器件和电池会损害其使用寿命,所以直接选用市面上现有的花盆托盘作为底座基体,进行打孔加工制作。
2.4 全向轮的设计
建模设计出全向轮[8-9],在底座运动过程中,地面对全向轮的反作用力会施加于滚轮上,错开的轮毂[10]能保证每个全向轮在运动过程中都有一个滚轮支撑,具有足够的承载力。选用M2的螺栓作为每个滚子的支撑杆。
2.5 整机结构及工作原理
该盆栽智能底座主要由机架、托盘、全向轮和电机等组成,其结构如图2所示。
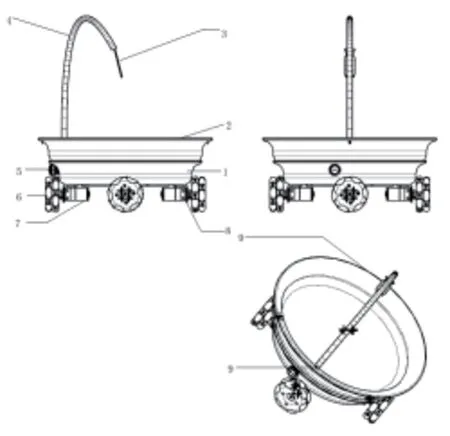
图2 盆栽智能底座结构图
3.实验及结果分析
按照上述理论,本研究设计的盆栽智能底座如图3所示。

图3 盆栽智能底座实物图
根据设计需求,对样机进行搭载盆栽追光实验,结果表明:采用全向四轮十字对称布局的智能底座进行工作,能够实现光照强度对比、实时检测温度湿度以及避障的要求。
4.结束语
本文完成了盆栽智能底座的设计,具有新颖性和移植互通性。结果表明:在其开机工作后,能够实现自动搭载二到三盆盆栽在阳台上自动追光。实时检测温度、湿度以及移动过程中避障。该盆栽底座具有如下特点:
(1)选择了全向轮移动平台盆栽底座的结合,控制相对简单的方案。
(2)相较智能花盆而言,智能底座可实现搭载多个花盆或多个盆栽,通用性较强。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
一重技术(2021年5期)2022-01-18
童话世界(2020年8期)2020-06-15
红领巾·探索(2020年3期)2020-05-19
小学生导刊(2018年1期)2018-08-15
小学阅读指南·低年级版(2015年2期)2015-03-17
汽车与新动力(2014年3期)2014-02-27
