船舶耐波性实时监测系统设计实验分析
2022-10-12 03:56徐茂胜杨旺林杨松林
交通科技与管理 2022年19期
徐茂胜,杨旺林,杨松林
(江苏海艺船舶科技有限公司,江苏 镇江 212009)
0 引言
一些船舶航行水域多变,对耐波性提出较高要求。目前建立船舶运动数学模型主要有机理建模法和辨识建模法。随着系统辨识的不断发展以及船舶模型试验数据采集方法的日益优化,系统辨识研究船舶性能已广泛应用[1-5]。船舶摇荡是耐波性的主要内容,耐波性所涉及的其他内容主要是由船舶摇荡引起的[6-7],因此预测船舶摇荡是耐波性评定的最基本条件[8-10]。
该文研究的核心内容是船舶耐波性实时监测系统的设计。建立船舶耐波性系统辨识模型,实时地对一艘滑行艇模型进行操纵性辨识。包括建立船载各传感器或艇载电脑与岸机之间数据的实时传输及相关显示或分析系统。通过对船模耐波性实时监测,验证所设计监测系统的可靠性。主要内容包括:船舶耐波性实时监测硬件系统、软件系统设计以及试验验证。
1 船舶耐波性实时监测系统搭建
1.1 实验模型
该次实验选用了江苏科技大学船模室的一艘无人滑行艇模型,其主要参数如下(见表1)。

表1 船模主要参数
1.2 硬件系统
要实现对船模耐波性实时监测,船模需包含核心控制系统、姿态测量系统、导航定位系统、数据传输系统、数据分析系统、能源系统,各系统有机结合,组成船舶耐波性实时监测的硬件系统(见图1)。

图1 硬件系统框架图
1.3 软件系统
实现船舶耐波性的实时监测,要结合相关软件系统与前文所述的硬件系统相辅相成。耐波性实时监测软件系统要建立耐波性数学模型,进而确定相关性能的监测方法。首先建立耐波性数学模型,然后运用系统辨识的方法对耐波性进行实时监测。对所需数据进行测量、传输,再由岸机电脑进行计算。软件监测系统框架图见图2。

图2 软件监测系统框架图
波浪引起船舶在水中摇荡,受力可表现为阻尼力矩的形式。该文主要构建船舶在规则波浪中的横摇运动数学模型。
根据动平衡原理,作用于横摇运动船上的总力矩等于零,则得到:

在某一特定周期下,波浪扰动力矩可视为波高的函数,这里假设波浪扰动力矩是波高的二次函数,当波高为零时波浪扰动力矩也为零,再将 离散化,即有对k+1下的角速度预报为:
2 船舶耐波性实时监测系统船模试验及分析
将前述各系统有机结合,通过模型试验进行验证。该试验着重验证所构建船舶耐波性实时监测系统的可行性、稳定性。
2.1 耐波性实时监测试验方案
结合上述船舶横摇运动数学模型及系统辨识数学模型,在试验中主要开展船舶横摇运动实时监测。方案一是通过控制短周期内舵角的正负变换使船模在运动中发生横摇,电机电压1.7 V,舵角30°,周期2 s;方案二为船模大角度(初始横摇角度为20°)横摇衰减试验,试验数据通过所建实时监测系统,传回岸机PC电脑进行系统辨识。试验在江苏科技大学室外游泳池进行。
2.2 耐波性实时监测试验情况与分析
实验时天气状况较好,水面微小波浪。对泳池中的波浪做出假设:波浪波幅为3 cm,周期为2 s,正弦规则波见图3、图4、图5、图6。
图3 耐波性实时监测试验
图4 横摇辨识程序界面
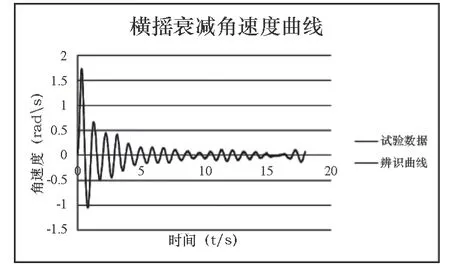
图5 20°横摇衰减时对角速度拟合曲线

图6 强迫横摇对角速度拟合曲线
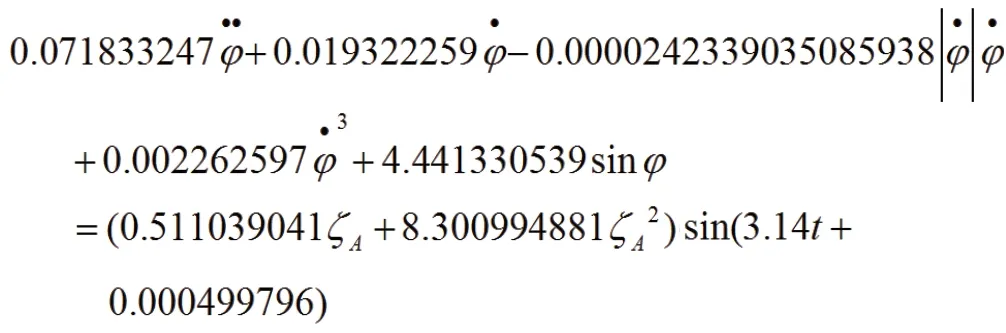
20°横摇衰减横摇运动方程为:
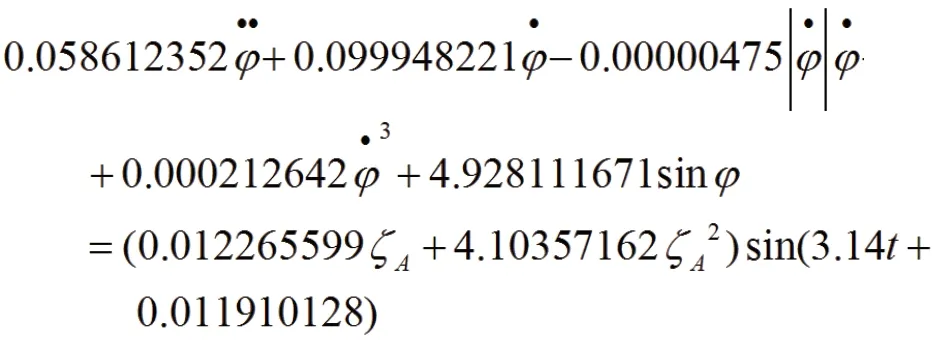
强迫横摇运动方程为:
试验过程中,船模在设定程序下进行了强迫横摇运动,用以模拟船模在运动过程中产生的横摇运动。MTi串口正常调用并采集数据,岸机正常接收MTi所采集的实时数据。试验结束后在PAC内部成功生成记录MTi数据的TXT文档。将横摇运动辨识所需相关数据带入到回转性能系统辨识程序中,系统辨识程序处理数据正常,对试验数据的拟合效果良好。通过横摇衰减系统辨识拟合图表,可得知所构建的横摇运动系统辨识数学模型能够用于研究该船模的横摇运动情况。
试验中,数据采集系统工作正常,数据传输系统工作正常,数据分析系统工作正常,且所构建的船舶横摇运动系统辨识数学模型可靠。
综上,判定船舶耐波性实时监测系统,对船模耐波性实时监测正常,船舶耐波性实时监测系统试验验证成功。
3 结论
该文构建了船舶耐波性实时监测硬件系统。以可编程自动控制器PAC作为核心控制器,导航系统由DGPS、三维电子罗盘组成,姿态测量系统由激光测距仪、MTi组成,数据传输系统采用数传电台,数据分析系统采用PC电脑。通过测试,该硬件监测系统符合该文所构建的船舶操纵性实时监测系统的要求。
同时,构建了船舶耐波性实时监测软件系统。建立了船舶耐波性数学模型,基于遗传算法确立了耐波性性能研究的系统辨识模型,并基于VB6.0改编了相应的系统辨识程序;编写了船模运动控制、数据传输程序以及各数据采集串口程序,设计了PAC执行程序界面。
对船舶耐波性实时监测系统成功进行了船模试验验证,该系统设计成功。
猜你喜欢
学苑创造·A版(2022年4期)2022-06-18
新高考·高二数学(2022年3期)2022-04-29
中学生学习报(2022年16期)2022-04-16
阅读与作文(小学高年级版)(2020年3期)2020-03-02
当代陕西(2020年24期)2020-02-01
中学数学杂志(初中版)(2016年5期)2016-11-01
中学数学杂志(初中版)(2016年5期)2016-11-01
小学生时代·大嘴英语(2014年6期)2014-11-04
航海(2014年4期)2014-08-28
中学科技(2009年5期)2009-12-17