
基于遗传模拟退火算法的逆变器谐波消除技术研究
2022-10-09 08:37:52王英林付佳宇
机电工程技术 2022年9期
陶 蕾,王英林,付佳宇
(中国电力工程顾问集团华北电力设计院有限公司,北京 100120)
0 引言
随着半导体加工技术的快速发展,电力电子技术得到了迅速进步,各种新型电力器件的研发也层出不穷,从而使得多电平逆变器的应用越来越多,覆盖面积越来越广[1]。多电平逆变器由于存在输出容量大、输出波形质量好和开关频率低等优点,在中高压电力系统和大功率电力设备的电机调速控制中,受到了研究人员的广泛关注[2]。
变频设备的使用,逐渐进入到人们的生活,变频设备带来的谐波污染则受到了广泛的重视[3]。谐波污染能够降低电能使用效率,在电气设备的应用中,谐波也会造成断路器的误动作,引起经济损失;谐波同样会使得电气设备在使用过程中产生过热现象,降低设备使用年限;谐波会对通信设备产生严重的信号干扰,影响其正常使用[4]。这些状况的出现,使得对于谐波的抑制成为电力电子领域需要迫切解决的技术难题[5]。对于逆变器的特定谐波消除控制技术,主要在于对于器件开关时机的选择和把握,如何实现对于逆变器非线性方程的求解,且能够保证求解速率和求解精度,成为限制该技术发展的瓶颈[6]。传统的计算方法,主要通过对方程组提供一个初值来实现对于方程解的计算。但是该方法的效率不高,不能保证其收敛性[7]。
本文利用算法的改变,在特定谐波消除技术的非线性方程组求解中引入了遗传算法和模拟退火算法,针对算法中的缺陷,对其进行相应地改进,以提高算法求解的精确性和收敛性。最终通过实验仿真,证明本文方法的有效性。
1 逆变器谐波消除技术
1.1 多电平逆变器
逆变器一般用于对直流电流进行改变,将其变成定频定压或者调频调压的交流电流,通常用于光伏并网系统[8]。多电平逆变器是在逆变器的基础上的发展,多电平逆变器能够根据正弦波的幅值情况,利用阶梯波形来近似,阶梯的级数越多,对于正弦波就越接近[9]。根据阶梯的数量,可以将多电平逆变器分成3电平、5电平、7电平等[10]。
多电平逆变器的优点在于可以使功率器件、电力器件、光伏系统等元件工作在低频状态下,降低器件的损耗,对于信号的电磁干扰等也很小,具有较高的逆变器效率[11]。其主要的缺点在于需要的功率元件数量较大,器件成本较高[12]。
多电平逆变器的拓扑结构有很多种,但是主要以3 种结构为主,分别为级联型、钳位二极管型和飞跨电容型[13]。这3种逆变器具有开关损耗功率小、开关频率不高、输出电压谐波含有量与电平数呈反比的特点。
以钳位二极管型器件为例,该多电平逆变器主要是在逆变器的中性点上增加半导体电力开关的基础上发展起来,实现了3电平逆变器的功能[14]。对其拓扑结构的进行改进,可以利用多个开关实现不同组合,进而实现更多电平数的逆变器拓扑结构。钳位二极管型多电平逆变器的拓扑结构如图1 所示。由图可知,该逆变器分布利用4个反向并联的二极管结合4 个有源开关形成逆变器的单相桥臂电路。

图1 钳位二极管型逆变器结构
如果逆变器电路中电容的参数相同,且工作状态为理想状态,则该两个电容具有相同的充放电时间。因此整个电路的电压Ud被两个电容分成了3 个电平状态,分别为+Ud/2 电平、0电平和-Ud/2电平。
以三相电中的任意相A相为例,通过控制电路中的开关通断,能够有效实现对于其电位的改变。当图1 中的上半部分的两个开关闭合,而下半部分的两个开关断开时,相对于O 点,A相的输出为+Ud/2 电平;反之,当上半部分的两个开关断开,而下半部分的两个开关闭合情况下,此时,相对于O 点,A相的输出为-Ud/2 电平;当图中位于两侧的开关T1、T4 断开,而内侧两个开关T2、T3闭合情况下,此时,相对于O点,A相的输出为0 电平。由于所有的开关中T1 和T3、T2 和T4都是工作在互补状态下,即二者不能同时闭合或者同时断开,因此电路的输出只能维持在上述3种电平状态下。
如果对于相同的逆变器电路中,将其串联多个电容,则对于单相电路的电压输出来说,就可以实现多个电平状态,从而实现多电平的逆变器输出控制。
钳位二极管型逆变器,利用钳位结构有效解决了整个逆变器中功率器件的电位平均分配问题。由于开关之间的互补性,使得所有开关不能全部闭合或者断开,必然维持一半开关处于闭合状态,从而使得半导体开关受到的应力作用较小,对于器件的动态性能影响不大,使得系统的工作可靠性大幅提高。逆变器中的电位控制更近灵活,电平波动梯度小,使得由于电压波动产生的谐波畸变概率大大降低,减少了对于电压负载的冲击,提高了系统的稳定性。
该种类型的逆变器尽管控制效果好,但是整个电路中的器件数量过多,使得逆变器的成本上升。而且由于在实际控制中很难达到所有电容的理想状态,容易造成输出电位状态的不稳定问题。
1.2 特定谐波消除技术
电力电子技术的快速发展,使得电力电子设备的效率得到快速的提升,但是伴随着效率的提高,谐波含量也逐渐成为了衡量该设备优劣的一个重要指标[15]。
在逆变器尤其是多电平逆变器的脉宽调制过程中,利用特定谐波消除的方式能够有效提高其性能,从而被大量应用于电力电子设备的无功补偿以及变频调速之中。
特定谐波消除技术的核心问题在于对电力电子设备的开关时间进行控制,尤其是对于其中的半导体开关器件来说,开关时间的精确程度决定了其谐波消除的效果。根据非线性方程约束条件的特异性,特定谐波消除技术可以分成3 个类型,即无对称型、1/4对称型和1/2 对称型。对于逆变器的谐波消除来说,一般认为其输出的电压波形是关于1/4 对称型的,通过傅里叶变换可以有效改变输出波形的形态,从而可以进行展开分析和求取其数值解。
特定谐波消除法是通过对逆变器的输出电压波形进行傅立叶级数分析,通过对开关器件的开关时刻进行优化选择,令某些不需要的低次谐波为零,得到一组非线性方程组,对方程组进行求解,即可得到相应的控制开关角度,使输出电压不存在待消除的谐波。
由于逆变器输出电压的函数波形具有1/4 周期对称性,根据Dirichlet定理,对输出波形进行傅里叶技术变化,得到结果为:

输出电压函数具有奇函数特性,因此对于其傅里叶变换中,余弦函数对应的系数均为0,即a0=a1=……=an=0。
由于波形需要满足整个函数范围内的1/4 周期对称性,因此其正弦函数对应的系数bn满足以下关系。


上述式中,N为整个输出波形的1/4 周期内的开关角度个数,开关角的范围在0~π/2 之间,且开关角之间的关系为依次增大。
通过对系数bn进行变换,可以得到该逆变器输出函数中的谐波含量,以及各开关角度的表达式。

对于谐波消除,通常需要消除掉的谐波为次数较低部分。如需要在整个波形中消除3次谐波和5 次谐波,需要使其对应的系数b3和b5为0,进行求解。对于基波,其幅值系数b1一般为定值。从而形成一个对应的非线性方程组。求解对应的方程组,从而可以解得对应的开关控制角。
2 遗传退火算法
随着智能技术的快速进步,通过智能算法来完成对于特定谐波消除非线性方程组的求解受到了研究人员的关注。目前关于特定谐波消除技术的算法主要包括遗传算法、蚁群算法、粒子群算法、神经网络算法等。基于对于自然生物的模拟,这些算法都可以通过计算机程序来完成对于方程最优解的搜寻工作。一般来说,智能算法均含有主动学习、内部优化等特点,因此使用十分广泛。
2.1 遗传算法
遗传算法来自与计算机对于生物遗传特性的模拟,利用生物进化的机制,形成的一种自适应的最优解搜索算法。该算法是一种并行高效率的全局搜索算法,通过对于初始函数求得原始解,利用其算法中的交叉、选择和变异等变换,以适应度作为其函数评价指标,最终选择适应度函数最大的个体节点向下一代传递,直至寻找出最优解。
该算法包括的主要操作包括以下几个部分。
(1)编码。利用二进制或者其他实数形式等对于待搜索的数据解进行编码,以获得满足条件的数据结构。
(2)种群创建。确定好数据的编码后,随机创建出一定量的原始数据,以这些原始数据作为种群来进行操作。
(3)适应度函数。适应度函数的目的在于评价种群中各个个体的表现情况,对其按照评价情况进行排序。表现好的个体可以进行繁殖,产生下一代,表现不好的个体则会进行淘汰。
(4)选择。按照适者生存的原则,对于在适应度函数排序中表现好的个体,以其作为种群繁殖的父代,产生新的种群。一般来说,某个个体适应度函数的数值越高,其作为父代的概率也就越大。
(5)交叉。交叉的意义类似与自然界中的基因重组,通过父代结构与其他父代结构之间的基因交换,产生新的子代个体。新的子代结构中含有父代个体中的综合特性,体现出遗传的特性。
(6)变异。变异是种群进化的一种方式,通过变异的形式,使得种群变成一个新的群体。避免遗传算法陷入死循环,只能搜索到局部最优而得不到全局最优的情况。
2.2 模拟退火算法
模拟退火算法是一种基于组合优化的最优解搜寻方法,该方法的原理类似于固体物质的热退火处理,利用加热将固体升温至熔点,融化后的晶体会由于热运动实现晶格从组,从而在冷却的过程中,修复原先固体中的晶体缺陷。
模拟退火算法由Metropolis 提出,该算法也是一种自适应的最优解搜索算法。利用给数据设定一个初始温度,实现数据的加温过程,利用抽样对数据进行恒温操作,通过控制参数的设定,最终实现降温,从而完成整个数据的模拟退火过程。
在非线性方程组的求解中,同样可以利用模拟退火算法进行最优解的搜索,该算法收敛能力强,具有较好的鲁棒性。模拟退火算法的重要特征在于其Metropolis 准则,该准则能有效保证在数据最优解的求取过程中,可以允许一部分适应度函数较低的数据解被算法接收,从而有效避免算法陷入局部最优解的循环之中。
Metropolis准则的定义为对于上一代个体x1和下一代个体x2,其对应适应度函数为f(x1)和f(x2),适应度函数的差为df =f(x1)-f(x2)。则Metropolis准则可以表示为:

如果适应度函数的差df 小于0,则接受该函数的新解x2;其他情况下,则该函数接受新解x2的概率为exp(-df/T)。
2.3 遗传退火算法
将遗传算法与模拟退火算法结合,利用遗传算法的全局寻优能力和模拟退火算法的跳出机制,能够有效避免算法陷入局部最优的情况,提高最优解的寻找效率。将两种算法的优势结合,可以用于处理逆变器中的的谐波消除非线性方程的求解之中。
遗传退火算法对逆变器输出波形中的开关角度进行数据编码,并设计出相应的适应度函数,结合退火算法来完成求解过程中的个体寻优,使得最优解求取过程中收敛速度更快,计算效率更高。
遗传退火算法的流程如下。
(1)参数初始化:对于算法的计算来说,参数的选择意义重大,遗传退火算法中涉及的参数主要包括遗传算法中的种群大小、交叉变异操作的概率、退火算法中的温度、降温速率等。
(2)种群初始化:利用遗传算法中的创建函数建立合适的种群,并设定函数的适应度数值。
(3)设定算法中的循环代数为0。
(4)根据遗传算法的规则进行数据的交叉、变异和选择的操作。
(5)计算选择个体的适应度函数,利根据模拟退火算法的Metropolis准则对个体进行操作和数据更替。
(6)若算法代数gen 低于代数最大值,则gen =gen +1,算法跳到步骤4。其他情况则跳到步骤7。
(7)若温度低于终止温度则算法结束,否则继续降温,直至温度达到终止温度。
3 实验结果与数据分析
3.1 算法对比
为了验证遗传退火算法在逆变器谐波消除中的作用,将遗传退火算法与遗传算法进行对比。算法的参数设置如下:迭代次数设置为200,种群大小为50,设定发生交叉的概率为0.7,发生变异的概率为0.4,退火算法中的初始温度为100,截止温度为20,设定冷却速率为0.07。
根据不同的调制度,对该钳制二极管型逆变器进行计算,运用两种算法的次数均为50 次,对计算结果进行统计,比较两种算法得到开关角度值和谐波总畸变量THD 值。计算结果如表1~4所示。

表1 遗传算法求得的开关角度解
对比表1和表2的情况可以知道,采用不同的算法计算结果还是有明显差别的,利用遗传退火算法的适应度函数可以取得更高,而得到THD 值相比遗传算法更低,说明利用遗传退火算法,可以得到的开关角度值更优,算法的谐波消除效果更好。

表2 遗传退火算法求得的开关角度第1 组解
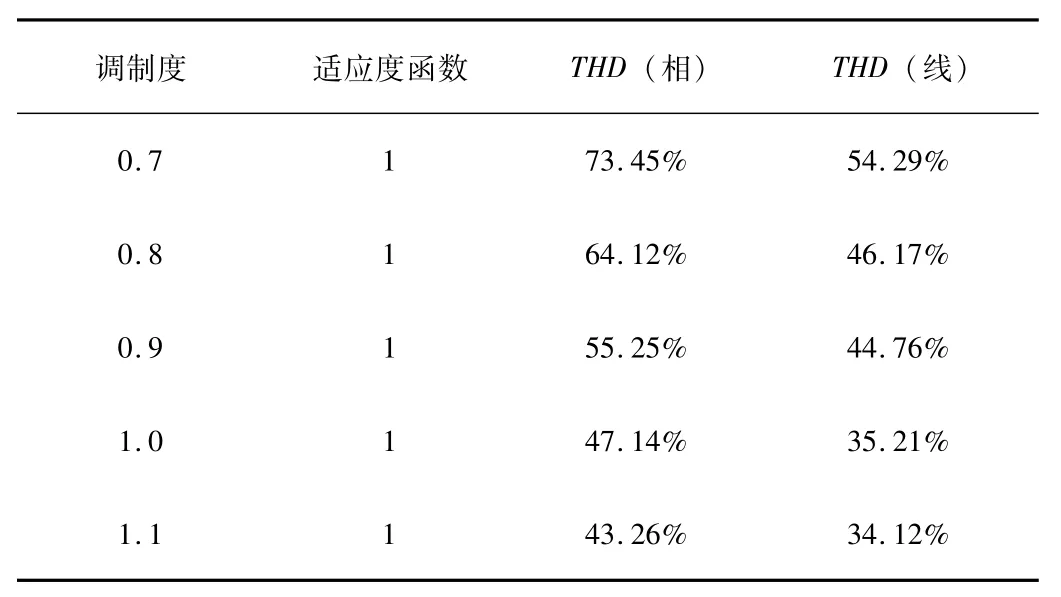
表3 遗传退火算法求得的开关角度第2 组解
在高的调制度情况下,遗传退火算法可以获得3 组解,解的情况如表2~表4,说明该算法的解具有多样性,更容易得到全局最优解。

表4 遗传退火算法求得的开关角度第3 组解
3.2 仿真验证
为了证明本文算法求得结果的正确性,以及验证该结果的谐波消除效果,利用Simulink对于本文研究的钳位二极管式逆变器进行建模和仿真。
根据算法的计算结果对电路中控制开关的开关时间进行优化,从而实现特定谐波消除,选择直流电源的电压值为50 V。在调制度为0.9 时,得到3 组解在不同开关角度下的频谱图,如图2~4 所示,并求得不同解情况下谐波总畸变THD值。由图可知,对于仿真结果的频谱图,相电压和线电压对应的谐波如5、7、11、13 次等均被消除,从而证明本文算法的有效性。

图2 调制度0.9 时第一组解对应的频谱图

图3 调制度0.9 时第二组解对应的频谱图

图4 调制度0.9 时第三组解对应的频谱图
3组解均能实现谐波消除的效果,证明本算法的多样选择性。所有解中,第2组解的效果最好,THD含量也是最低,为所有解中的最优解。
所有解的调制比范围和THD 含量均不相同,可以使得在实际的电路应用中选择的余地更大,可以根据情况选择合适的开关角。
4 结束语
针对逆变器的谐波消除问题,本文研究了利用遗传退火算法来完成最优解寻找的工作。逆变器谐波的消除方法,主要是通过对逆变器的开关时间进行精确控制,从而实现对于谐波的消除效果。通过构建逆变器的非线性方程,发挥遗传算法和退火算法各自的优势,将两者有机结合。通过仿真实验,证明本文算法在逆变器的谐波消除中是有效的,相比于遗传算法效果更好,可以提供的解的方案有多组,表明本文算法的多样性,可以根据实际情况选择不同的开关角,来满足谐波消除的要求。通过仿真结果的频谱图,本文成功实现了相电压和线电压对应的谐波如5、7、11、13 次等的消除,从而证明本文算法的有效性。
猜你喜欢
计算机仿真(2022年8期)2022-09-28 09:53:02
测控技术(2018年3期)2018-11-25 09:45:08
中国塑料(2016年11期)2016-04-16 05:26:02
电测与仪表(2016年22期)2016-04-12 00:19:58
电测与仪表(2016年17期)2016-04-11 12:38:44
电源技术(2015年5期)2015-08-22 11:18:24
电子工业专用设备(2015年4期)2015-05-26 09:10:33
电测与仪表(2015年2期)2015-04-09 11:28:58
城市轨道交通研究(2015年3期)2015-02-27 11:01:36
电测与仪表(2014年7期)2014-04-04 12:09:32
