
行业应用场景下无人机无人值守自动起降机场的设计
2022-10-09 08:37宋晨晖程子啸
机电工程技术 2022年9期
宋晨晖,程子啸
(广州亿航智能技术有限公司技术部,广州 510663)
0 引言
随着无人机行业电池、通讯、挂载等技术的快速发展,无人机以其位于高空中的灵活视野和不受地形限制的机动性,已经成为行业巡检与日常巡逻领域的重要工具。在电力、能源、工业园区等行业中利用无人机对特定区域或固定线路的目标进行快捷巡查,采集数据,为行业决策管理提供更多的依据,提高决策管理的效率和准确性[1-3]。
虽然无人机在行业应用的场景中优势明显,但在实际使用过程中仍然存在人员操作水平参差不齐、临时起降场地环境变化大、通讯状况受地形限制、作业现场充电难等问题[4]。例如在远郊进行巡检作业时,每次飞行均需专业飞手到达现场进行环境勘察及作业路径规划,同时还需携带大量飞行动力电池甚至临时搭建充电环境以支撑完整的作业流程。在实际应用过程中人力与资源的投入相较传统人工巡检模式而言性价比并不凸显。
为应对行业应用场景中存在的痛点,耿寒等[5]于2018 年开始探讨电力巡检行业中巡检起降平台的设计。受无人机应用方式所限,起降平台的设计仍旧基于人员携带装备现场作业的形式,鲜有人提及远程无人机搭配定点自动机场的应用形式。当下通过4G/5G 通信能力已可实现无人机的全自动化作业,再结合分布式部署的远程无人值守型自动起降机场,根据不同的应用场景实现无人机自主作业-自动回收-可靠存储-数据回传的全自动化流程,将会大大提升无人机应用能力的上限。本文主要研讨分布式部署情况下远程无人值守自动起降机场的构成与设计[2]。
1 无人值守自动起降机场构成
无人值守自动起降机场是一个系统工程,该系统由场景要素和功能要素组成[7]。
1.1 场景要素
无人值守型自动起降机场在行业应用场景中承担了无人机的远端存储、简单维护、实时状态监视、辅助自动起降等职责,是实现无人值守前提下进行分布式部署的必备条件。
远端存储:在分布式部署的前提下,无人值守型自动起降机场的部署方位将会远离维护人员或控制中心,自动起降机场需要具备安全保管无人机的能力。包括应对一日内不同的气象条件、随季节更迭的气温与湿度变化、防护蚊虫或野外小动物的侵入、阻止人为恶意破坏等。
简单维护:由于自动起降机场多会部署于远离控制中心的方位且无人值守,其需要自行完成对无人机的充电维护、休眠保存、远程唤醒、实时状态监视等必要活动,用以替代正常使用过程中维护人员所进行的基本操作。
实时状态监视:为了能让控制中心的工作人员及时了解到远端设备的实时状态,自动起降机场需要具备内环境与外环境的状态监视能力。对于内环境而言,除了依托网络通信能力监视自动起降机场自身的运行状态以外,还需要监视无人机的实时数据状态、电池维护状态、存储舱内的视频状态等。对外环境需要监视自动起降机场外部的实际气象条件、光照条件、周边场地环境等。
辅助自动起降:由于无人值守的需求,自动起降机场需要通过程序化指令安全地与无人机配合,完成进行起飞前准备、辅助降落、回收存储的活动。
1.2 功能要素
1.2.1 起降场地选址
在远端部署需求下,对起降场地选址及环境产生了一定要求。自动起降机场的选址首先需要具备良好的卫星定位条件,一般来说选址区域足够开阔,远离树木或高大建筑群可有效降低卫星定位的多路径效应干扰[8]。其次对于旋翼机或具有垂直起降功能的复合翼机型而言,需要在起降场地半径30 m 内的筒形区域内垂直方向无障碍物。场地应尽可能位于地势相对较高之处,以免遭受水淹或受周边树木、围墙倒塌等不可抗力因素的影响。同时应尽可能远离与无关人员频繁接触的区域,减少人为破坏可能性。
1.2.2 规范航线设计
对于固定区域的巡检场景,为了确保每次作业过程中信息采集的一致性,需要对该自动起降机场所使用的无人机执飞航线进行完整设计并进行规范化存储管理,以减少人为操作的误差影响。具体执飞时机由人工触发或系统自动远程激活。
1.2.3 通讯链路保障
在航线设计的论证过程中,需要对典型的作业区域及起降场地的空域进行通讯链路保障。
1.2.4 装备功能保障
自动起降机场需要具备保障无人机设备的能力,包括:保障无人机存储环境的稳定、对无人机进行充电的配套功能、对无人机进行收纳放置、具备内部系统的监视功能、具备外部环境的监视功能、提供长时间联网通讯功能、机械执行机构的备份、稳定的能源接入能力与备份能力、设备自身防护能力[9]。
2 无人值守自动起降机场设计
无人值守自动起降机场由硬件平台和软件系统构成。
2.1 硬件平台
硬件平台包含以下构成:舱门闭合装置、停机坪装置、自动归中装置、充电供电模块、环境监测模块、远程通信模块。通过对系统外环境的监测与内环境的控制,将为远程工作人员提供作业依据、延长无人机的使用寿命、减少外界对无人机的损害,同时在稳定的内部环境中完成无人机的设备维护活动。
2.1.1 舱门闭合装置
舱门闭合方式选择顶部对开门方式。顶部可将舱门导轨向两侧延伸,确保对开门能够完全打开并露出停机坪装置。双对开门同时能够保证两侧导轨的负载处于合理的范围,承受顶部积雪和冰冻带来的不利影响。对开门接口处需采用电热方式进行加热,主要为应对冰雪天气所使用,以防止舱门冻结无法开启。同时需在对开门接缝处使用加硅橡胶进行密封防水处理(图1)。

图1 舱门闭合方式
2.1.2 停机坪装置
停机坪装置是为无人机起降及存储提供必要功能的装置。考虑无人机在停机坪起降时的卫星定位效果以及近地时的控制精度,一般来说停机坪装置的对角线长度应约等于2.5~3.0 倍无人机轴距为佳(图2)。过大的面积会增加自动起降机场其它部件的安装难度,增加机场整体占地面积,降低部署时的灵活性。而过小的面积则无法在无人机自主降落的过程中提供足够的安全冗余,等于变相提高无人机自主降落的控制精度要求。同时,停机坪表面设置了引导无人机降落定位的视觉识别图形符号。当无人机返航下降至停机坪上方约30 m 左右时机上携带的下置式微型摄像头可捕捉到此视觉识别图形符号,该符号用于辅助修正下降阶段的飞行控制姿态以确保无人机顺利降至停机坪上方。

图2 停机坪布局
2.1.3 自动归中装置
自动归中装置是为了修正无人机自主降落时所产生的精度误差,将落至停机坪范围内的无人机通过自动归中装置推至停机坪中央位置,为充电维护活动及下一次起飞作业做准备。当舱门开启等待无人机起飞或降落时,自动归中装置将退至停机坪边缘以留出足够的起降空间。其使用2×2 对中夹杆及同步夹紧形式,确保无人机在推中的过程中受力均匀,不会导致脚架偏斜侧翻(图3)。

图3 自动归中装置
2.1.4 充电供电模块
充电模块使用触针式充电方式,当自动归中装置将无人机推至停机坪中央位置时,无人机脚架上预留的充电触针将对准平台中央预留好的探针接口。当充电模块检测到动力电池接入后将自动进行充电操作。待动力电池电量充满,充电模块通过探针接口与电池通信,将电池转入休眠模式以更好地延长电池使用寿命。此设计的优点可解决自动机械臂或人工装卸电池的成本问题,缺点则是每次作业后均需要一定的充电时间,会对连续作业场景产生一定限制。
2.1.5 环境监测
由于充电活动位于舱内,通过设置自动恒温空调确保舱内环境处于良好状态以提高充电效率,降低锂离子电池热失控风险[3];舱外则布置立式支架并安装风速仪、温度湿度传感器以监测外部气象信息,为远程工作人员提供是否执行任务的决策依据;设置对内/对外视频监控摄像头,确保远程工作人员掌握舱内舱外的实时情况(图4)。
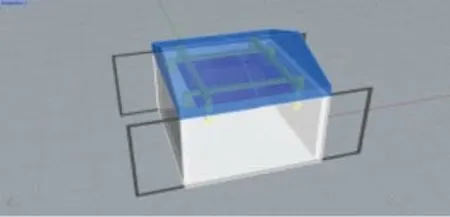
图4 整体状态示意图
2.1.6 远程通信模块
自动起降机场并非信息的孤岛,需通过远程通信模块与控制中心建立数据连接,所有实时数据反馈、状态监视功能及程序化指令的接收均依赖于此。远程通信模块具有以太网接入功能,在条件允许的环境下通过网络布线的形式接入网络环境。在不具备网络布线的环境中,使用4G/5G 模组以无线通信模式接入网络环境。
2.2 自动控制系统
自动控制系统是为了实现无人值守情况下无人机能自动起降的一种软件控制系统。在无人值守起降机场设计中,无人机降落引导程序最为关键,其决定了整体系统的安全性与可用性[4]。
2.2.1 无人机与起降装置互联互通
在整体系统构建中需要配置一远端服务器,无人机通过机载远程通信模块将自身实时工作状态上报至远端服务器,自动起降机场同理。远端服务器通过网络通信连接综合判断两方的工作状态:当远程工作人员需要无人机执行巡检任务时,通过网络获取无人机维护状态信息以及自动起降机场附近的环境信息,以为是否执行任务提供决策依据;当任务执行完毕回收无人机时,通过服务器判断无人机实时状态并为自动起降机场发送程序化指令,开闭舱门为降落引导程序提供必要的准备。
2.2.2 视觉识别降落引导
无人机在外部正常作业时舱门为关闭状态。当无人机返航至自动起降机场经纬度附近30 m 的空中时,服务器根据无人机实时状态发送开启舱门指令至自动起降机场。舱门开启后,自动归中装置退至边缘,即露出停机坪上布置的大型视觉识别符号A,至此由远端服务器控制的降落引导程序准备工作即已完成。正式引导程序分为以下3步。
第一步:当无人机返航至预定降落区域后,在某高度(30 m)开始识别停机坪视觉识别符号(图5)。

图5 无人机捕获停机坪识别符号
由于停机坪视觉识别符号与起降装置周边结构件的距离相对固定,则当无人机在预设高度识别到停机坪视觉识别符号时(白色中心点),机载飞行控制系统将无人机当前位置调整至其正上方(图6)。
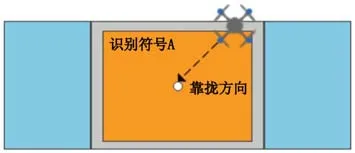
图6 无人机调整靠拢方向
第二步:当无人机位置朝停机坪视觉识别符号A中心点的位置靠拢后,无人机将开始执行降低高度动作。在此过程中飞行控制系统持续修正无人机与视觉识别符号的相对位置,并尽可能靠拢中心点。
第三步:无人机高度下降至近地区间后(10 m 以下),无人机视觉识别模块可能会丢失一部分大型视觉识别符号A的图像信息,此时无人机调整位置以停机坪大型视觉识别符号A 内部嵌套的小型视觉识别符号B1、B2、B3 等信息作为定位参照物(图7)。由于小型视觉识别符号距离中心点的位置相对固定,同理飞行控制系统可调整无人机位置直至成功触地。

图7 识别符号内嵌套信息
2.2.3 降落引导程序的搜寻模式
在上述视觉识别降落引导程序正常运行的前提下,额外增加降落引导程序的搜寻模式。无人机返航至目标经纬度并降落至某预定高度(25 m)时,若仍无法成功进入降落引导程序,则停留在当前高度并进入搜寻模式。搜寻模式为:以大地坐标系为基准,无人机当前经纬度坐标位置为中心,朝正北方向移动至边长为6 m 的方形轨道上。并沿此轨道进行一圈移动以搜寻可能存在的大型视觉识别符号A(图8)。

图8 降落引导搜寻模式
若无人机成功搜寻到停机坪大型视觉识别符号A,则转入降落引导程序。若搜寻失败,则令无人机悬停在原地并主动向远端服务器报出无人机当前所处状态,等待人工操作调整[5]。
3 结束语
本文在梳理无人机自动巡检场景下的问题与痛点基础上,通过分析无人机自动起降机场的场景要素与功能要素,提出一种无人机无人值守自动起降机场设计。
在硬件平台的设计中舱门闭合方式使用顶部双对开门形式以应对合理负载,停机坪布局尺寸约2.5~3.0 倍无人机轴距以提供起降安全冗余,自动归中装置使用2×2 对中夹杆及同步夹紧形式以确保无人机脚架受力均匀,充电供电方式使用触针方式以降低整体成本,配置恒温空调、风速计、温度湿度传感器、内外摄像头以实现环境监测与控制,配置远程通信模块实现与服务器的数据交互能力。
在自动控制系统中配置远程服务器以实现互联互通,在无人机飞控系统中设计视觉识别降落引导程序及搜寻模式,实现其精准的自动降落。
通过以上综合设计,可有效解决无人机续航时间短、需人工现场操作等应用问题,进而帮助提升无人机应用的能力上限。但该设计方案在分布式部署的情况下需要通过数据与视频回传的方式实时监控各设备运行状态,且需在降落引导程序失败的情况下及时进行人工远程介入,故对网络通讯质量极度依赖。
猜你喜欢
现代妇女(2022年5期)2022-05-25
小作家报·教研博览(2022年12期)2022-04-02
英语文摘(2021年11期)2021-12-31
航空世界(2021年4期)2021-06-29
舰船科学技术(2021年4期)2021-05-17
民用飞机设计与研究(2020年4期)2021-01-21
科技创新导报(2019年22期)2019-12-19
民用飞机设计与研究(2019年2期)2019-08-05
民用飞机设计与研究(2019年4期)2019-05-21
学生天地(2018年19期)2018-09-07
