基于无人机贴近摄影的高陡边坡结构面识别
2022-10-09 06:36陈昌富何旷宇余加勇毛凤山薛现凯李锋
湖南大学学报(自然科学版) 2022年1期
陈昌富,何旷宇,余加勇†,毛凤山,薛现凯,李锋
(1.建筑安全与节能教育部重点实验室(湖南大学),湖南长沙 410082;2.湖南大学土木工程学院,湖南长沙 410082)
丘陵、山地区域在我国分布广泛,大量的天然或人工高陡边坡受到气候、地质构造活动影响,极易造成严重的地质灾害,因此,对高陡边坡的勘察是监测和预警地质灾害的关键[1].结构面是岩体中强度较低的不连续面,是控制岩质边坡稳定性的重要因素,因此,结构面参数的获取是岩质边坡稳定性分析及后续工程支护方案设计的先行条件.然而,大部分的高陡边坡受复杂地形因素的制约,限制了接触式地质调查工作的开展.为满足高效精细化地质编录的需求,目前迫切需要新型的岩质边坡调查方法.
非接触式调查方法如干涉雷达(Synthetic Aperture Radar Interferometry,InSAR)[2]、摄影测量[3-4]、三维激光扫描[5-6]成为了广大地质工作者大力推崇的调查手段.地面三维激光扫描技术凭借其高精度、高信息量、高效率等优势,在岩土工程领域得到了较为广泛的应用,比如Riquelme 等[7]基于前人三维激光扫描的数据,提出岩体结构面半自动识别算法,并成功获取到了岩体中的产状信息.但三维激光扫描技术设备成本高昂,仪器架设地点需无遮挡,对于复杂地形容易产生扫描死角,不同站位的点云数据拼接也会影响模型的整体精度[8].
近年来,国内外研究者将无人机贴近摄影技术引入到边坡勘察调查工作中.Fernández 等[9]使用无人机获取了橄榄林的高分辨率影像,并建立数字表面模型(Digital Surface Model,DSM)以此进行滑坡监测,监测精度达到10~15 cm.许强等[10]结合无人机和地面雷达监测技术获取了滑坡区域的地质信息,初步分析出该区域灾害的成因机制和运动过程.Hu等[11]通过无人机对黄土高原滑坡的调查,观测了黄土滑坡的几何参数和表面细节,推测出其原始结构特征和滑坡诱发机制.Xiang等[12]通过无人机摄影构建露天矿的数字高程模型(Digital Elevation Model,DEM)计算了矿区的土方体积变化和可探测范围,实现了动态实时监测.贾曙光等[13]总结出无人机摄影测量应用于高陡边坡地质调查的方法,并基于此方法手动测量出边坡的岩体产状.
基于无人机倾斜摄影的边坡调查方法,是通过无人机搭载高清相机来获取边坡图像信息,进而生成边坡的三维实景模型,在此基础上进行结构面识别、稳定性分析及支护方案设计.其优势在于不受限于复杂的环境条件,能够快速机动地接近目标,高效率、非侵入式地实现图像数据采集.因此,无人机贴近摄影技术结合边坡结构面的自动识别算法能够开展高效率的地质勘探工作,极大节省人力物力成本.
目前,基于三维点云的结构面信息提取方法在国内外也有较多研究.Riquelme 等[14]基于Knn 算法对带有噪声的三维激光点云数据进行识别,得到了表面不同平面的代数方程.王培涛等[15]探讨了Knn算法其敏感性参数近邻点个数k,夹角阈值j在不同结构面识别中的应用效果,并以过滤因子f对点云中的噪声进行了优化.Chen 等[16]以K-means 聚类算法对点云分组,进一步通过点集的分割和优化,以RANSAC 方法对结构面进行拟合,在提取结构面产状上取得了较好的效果.陈娜等[17]通过改进RACSAC 方法和GrahamScan 算法研发了结构面产状识别程序,产状的误差达到了工程应用要求.Zheng等[18]对Fisher 分布描述结构面产状方法提出了修正算法,提高了结构面分布模拟的正确性.这些研究成果促进了结构面信息提取自动化的发展和创新.
为此,本文提出了基于无人机贴近摄影的高陡边坡勘测的方法,该方法能够获取高分辨率的边坡数字表面图像信息,建立误差极小的三维实景模型.在识别方法上,基于DSE(Discontinuities Semiautomatic Estimation)软件[14],以Knn 聚类算法及PCA 主成分分析法为主要结构,能够半自动地识别出边坡中的结构面信息.通过验证实验,证实了本文方法所构建的三维模型精度及结构面产状识别精度都较高.最后本方法成果应用于长沙市丁字镇某高陡岩质边坡的结构面识别中,并分析了优势结构面对边坡稳定性的影响.
1 无人机边坡结构面识别方法
无人机边坡结构面识别方法主要包含前期准备、数据获取、模型构建、模型修饰、产状提取等步骤,如图1所示.

图1 结构面识别流程图Fig.1 Flowchart of discontinuities identification
1.1 边坡三维模型重建
在常规倾斜摄影测量方法中,无人机的飞行高度为固定值,在拍摄地面高度有起伏的目标时,其图像分辨率不均匀,导致三维模型的精度和纹理细节不均匀.本文采用的贴近摄影测量方法,是为获取复杂地形的高分辨率、精度均匀图像而创立的新型无人机摄影方法[19].贴近摄影的特点在于经过粗略的地质勘察之后,设计出无人机三维航线,使无人机在拍摄过程中与边坡面的最短距离在30 m 之内且基本保持恒定,同时镜头的光轴与坡面保持垂直,如图2 所示.此方法获取的高分辨率目标图像,各个区域分辨率较均匀,避免了模型重构过程中因局部分辨率不同而导致数字模型出现分层的问题.

图2 无人机三维航线示意图Fig.2 UAV 3D route diagram
基于运动恢复结构(Structure From Motion,SFM)算法重构出三维数字模型是进行结构面识别的前提,无人机的飞行高度、相机倾斜角度、地形、地面控制点的数量、图像重叠率是影响精度的重要参数[20-21].无人机飞行参数的设置以上述研究得到的最佳参数为基础,根据现场的情况进行适当调整.由于贴近摄影测量在飞行高度上是不断变化的,因此飞行高度在此等同于无人机与目标的垂直距离.同理,认为相机的光轴与坡面垂直时,角度为0°.基于上述方法,边坡三维模型重建主要步骤如下:
1)试验前期准备.前期准备的重点在于地面控制点的布置.地面控制点应提前用全站仪精确测量,用于在空中三角测量的过程中提供强制的坐标矫正和后期的精度验证,使得空中三角测量的坐标匹配于真实的坐标上,提高内业成图的精度.其设置原则应尽量分布均匀,且应在区域的边缘处有所布置.
2)数字图像获取.无人机的航迹规划是获取高质量数字图像的重点.以国内外研究的成果为参考,贴近摄影无人机参数设置应满足与目标的距离基本保持在30 m 之内,图像重叠率达到80%以上以及相机倾斜角度为30°左右.
3)图像匹配与特征提取.相机从不同的角度获取的数字图像存在着畸变、几何变形等问题,基于尺度不变特征变换(Scale invariant feature transform,SIFT)算法将图片中局部灰度的极值点作为特征点提取出来,建立该点与景物之间的对应关系,从而避免了空间尺度中方向、旋转、亮度等因素的影响.
4)空中三角测量.解算特征点的三维坐标是建立三维模型的重要步骤,基于光束法区域网平差原理,以下视图像的精确POS 数据、相机外方位元素和相对姿态等参数,通过共线方程即可解算出特征点的三维坐标.少量的地面控制点作为平差条件通过最小二乘法调整出精确的三维坐标.通过大量特征点的计算即可建立三维点云模型.
5)实景模型生成.三维点云进一步计算和连结即可构建出三维三角网格表面模型,将图像中纹理像素映射到三维网格中,可得到高精度且细节丰富的三维表面模型.
1.2 边坡坡面结构识别与实现
以Knn 聚类算法核心搜索某个点的候选结构面点集,以主成分分析法(Principal Component Analysis,PCA)对候选点集测试,判断其是否满足构成同一平面的要求,之后基于最小二乘法原理拟合出点集的最佳平面并计算其法向量作为该点的属性,属性相同的点不断加入以确定该结构面的边界范围,最终确定结构面的位置和产状参数[7,14].算法的实现主要基于Matlab平台,主要步骤如下:
1)最近邻点搜索.如图3(a)所示,对于三维点云中的任意的原始点pi,需要找到其附近的点共同结合形成点云集{P}={p1,p2,…,pi,…,pn},并以{P}的所可能形成的平面法向量作为原始点Pi的法向量.搜索邻点的方式主要分为以距离搜索及以点个数搜索这两种,距离搜索在结构面边界的确定上会引起边界的收缩,因此往往以点的个数来进行搜索.为了实现此功能,目前Knn(K-Nearest Neighbor)算法是在三维点云的邻点搜索中较为常见的算法之一,它将搜索到用户指定的K-1 个与原始点pi最相近的邻点共同构成点云集{P}.在本文中,K表示包含原始点pi在内所搜索到的邻近点个数.
2)共面检验.如图3(b)所示,点云集{P}在计算其法向量之前,需要确定其是否属于同一个平面内,Matlab 平台的PCA 主成分分析法能够很好地实现这一功能.在点云所处的三维空间中,基于Matlab平台的PCA 算法可以计算出点云集中各点的3 个特征值λ1、λ2、λ3,此时λ3解释了数据中存在的误差,偏离参数可以用式(1)进行计算:

图3 结构面识别与提取算法计算流程Fig.3 Discontinuities identification and extraction algorithm calculation flow

点云中每个点都可以得到其偏差值ηi,当P所有的点其偏离参数都小于用户确定的阈值ηmax时,点云集P被认为处于同一个平面内,一般而言ηmax可取20%.
3)最佳平面拟合及法向量计算.当点云集P被认为是一个平面之后,则需要进一步拟合出最适合的平面方程及其法向量.标准平面方程如式(2)所示,其中A、B和C分别为该平面单位法向量在各个方向上的分量,满足A2+B2+C2=1,D为原点到平面的距离.

在计算中主要利用最小二乘法拟合最佳平面参数,当{P}中各点到平面的距离的方差最小时,此时的平面为最佳拟合平面,向量n(A,B,C)即为平面的单位法向量.
4)确定结构面边界.如图3(c)所示,通过计算每一个pi的法向量,以点之间的相连性、法向量之间的最大夹角、点到平面的最大距离为限制[15,22],将满足条件的点归为同一结构面内.且当有候选点加入时,应当及时修正平面的参数以进行下一次迭代,当没有更多的候选点即结构面边界描绘完成.需注意的是,当原始点pi处于结构面边界处时可能无法被认定为候选点致使结构面缩小,当点云密度足够大时,这种误差可忽略不计.
5)产状计算.产状的三要素为倾角、倾向和走向,以得到的平面方程参数可求得走向及倾角,走向角度为走向线与正北方向(N 轴)所成夹角,如式(3)~(5)所示:

走向的计算中还需依据式(4)来判断走向所处的范围.当A为0时,走向为正东方向或正西方向,也就是90°或270°,当C为0时,倾角为90°.
倾向与走向相互垂直,但由于倾向表示岩层下倾的方向,不能仅由走向确定,还需结合结构面的实际位置和形态,因此本文后续的结构面产状都将以倾向和倾角来表示.当三维点云建立的局部坐标系与大地坐标系方位具有α的夹角时,此时所计算出来的走向和倾向都要改变相应的角度α.
2 验证实验
2.1 实验区域与设备
验证实验目的在于验证模型的精度及结构面识别的有效性,实验地点为长沙市超级计算机中心的框架梁边坡.边坡如图4 所示,边坡全长约为60 m,坡高约为15 m,坡角约为70°.

图4 区域边坡Fig.4 The slope in the experimental area
如图5 所示,试验采用大疆M210-RTK 无人机,其续航时间为30 min,最大抗风风速10 m/s.无人机定位采用实时动态差分模式(Real-time Kinematic,RTK),其定位精度为平面1 cm、高程2 cm.相机采用大疆ZENMUSE X5S,镜头焦距为15 mm,像元大小为3.3 μm,分辨率为5 280×3 956.

图5 大疆M210-RTK无人机Fig.5 M210-RTK UAV
试验采用瑞士Leica T30 型号全站仪进行控制点三维坐标的测量,其中全站仪测距标称精度为0.6 mm+10-6×S,免棱镜测距标称精度为2 mm+10-6×S,其中S为测距.框架梁产状的测量采用哈尔滨DQY-1 型罗盘仪,地质罗盘仪磁针指示误差小于0.5°.在测量过程中,应事先校准罗盘仪的磁偏角,实验区域为西偏3°56′.
本实验中无人机与目标距离H保持在20 m 左右,计算数字图像的地面采样间隔(Ground Sampling Distance,GSD)可按式(6)进行计算:

式中:a为像元大小;f为镜头焦距.计算的图像地面采样间隔为4.4 mm,满足高精度建模的需求.
2.2 边坡三维模型构建
边坡图像的采集共设计1 个正摄和4 个倾斜摄影航线,其中倾斜摄影中,镜头水平的倾斜角度为30°,竖直的倾斜角度为25°.无人机与边坡保持20 m间距,整个航线基本与坡面保持平行,航向重叠率和旁向重叠率都为90%.
坡面上预先设置了控制点和检查点,点位的绝对坐标已提前用全站仪测得并视为准确值,点位的样式及分布如图6所示.其中框型标记的6个控制点被应用在建模过程中充当平差依据,其余圆圈标记的检查点被用作模型的精度验证.坡面上梁的产状也提前用罗盘仪测出,用作结构面提取算法结果的验证.
2.3 三维模型精度分析
基于SFM 算法所重构出的边坡模型如图6 所示.通过对比模型中28 个检查点的坐标值与实际全站仪测得的值来评估模型的精度,精度评估的主要指标为均方根误差(Root-mean-square error,RMSE),可用式(7)计算:

图6 三维重构模型及控制点分布Fig.6 Digital surface model and control points distribution

式中:n为检查点个数;Xi为模型中测量值;Yi为全站仪测量值.各方向及空间的均方根误差为RMSEX=0.51 cm,RMSEY=0.57 cm,RMSEZ=0.57 cm,RMSE全=0.95 cm.可以得到,模型的三维精度优于2 cm,此精度足以满足大部分的工程需求,也保证了下一步产状提取结果的可靠性.
2.4 结构面产状自动识别
为实现对边坡中结构面的识别和提取,需要对边坡的三维点云进行降采样和去植被处理.当从倾斜摄影中生成的点云数据过于稠密时,不仅影响了算法的运行速率,并且可能由于最近邻点算法的K值(即Knn 算法中需要搜索的邻近点个数)过小而产生不必要的误差.Knn 算法中K值的选取应与点云密度、结构面的粗糙度、三维点云的精度相关,本文点云经降采样后间隔为0.5~5 cm,结构面较为光滑,经多次实验,取K=20,算法的运行效率和准确度都较好.模型中覆盖的植被在算法中也会被认定为结构面的一种,因此需要提前对点云进行修饰、删除,将3 个产状研究区域中点云提取经修饰后如图7所示.

图7 点云修饰前后对比Fig.7 Point cloud modifies contrast
如图8所示,选取了边坡不同位置的3个框架梁部分进行产状计算,不同的结构面以不同的灰度显示出来.每个框架梁分别选取了两个结构面进行验证,并与罗盘仪的测量结果对比见表1.由表1 可知,三维点云对结构面的识别结果与罗盘仪对结构面的实地测量结果倾向最大误差为2.8°,倾角最大识别误差为1.5°.罗盘测量倾向、倾角的标准差为4°和3°[23],以此为标准,本文方法对结构面产状的提取结果误差较小,满足工程中的精度需求.

表1 罗盘和无人机产状结果对比Tab.1 Results comparison between compass and UAV


图8 框架梁结构面识别结果Fig.8 Discontinuities identification results of frame beam
3 工程应用
3.1 实验概况
实验边坡位于长沙市望城区丁字镇采石场附近,研究区域边坡长约150 m,坡高约为50 m,坡角为77.7°,如图9所示.由于其显著的块体裸露特征及较高的坡角,因此极易发生崩塌和滑坡灾害.通过对边坡的工程勘察,可以判定边坡的优势结构面,并进一步为该边坡的岩体等级划分及稳定性评价提供理论参考,为边坡的支护设计提供技术依据.

图9 丁字镇边坡全貌Fig.9 Slope of Dingzi town
该边坡的条件不利于地质人员对边坡进行实地勘察,非接触式的无人机成为了一个有效的调查方式.考虑到研究区域在各方向上均有较大起伏,无人机与边坡的距离设置在25~30 m,相机倾斜角度同样采用水平30°,竖直25°,重叠率控制在90%.
3.2 三维模型重建与结构面识别
采用前述方法重构边坡三维模型,如图10 所示.若单一结构面点云占识别区域点云比重大于10%,则在本文中判定此结构面为该区域的优势结构面,对每个区域结构面的优势结构面进行提取,识别其形状、位置、面积、产状等要素,结果如图11~图13所示.
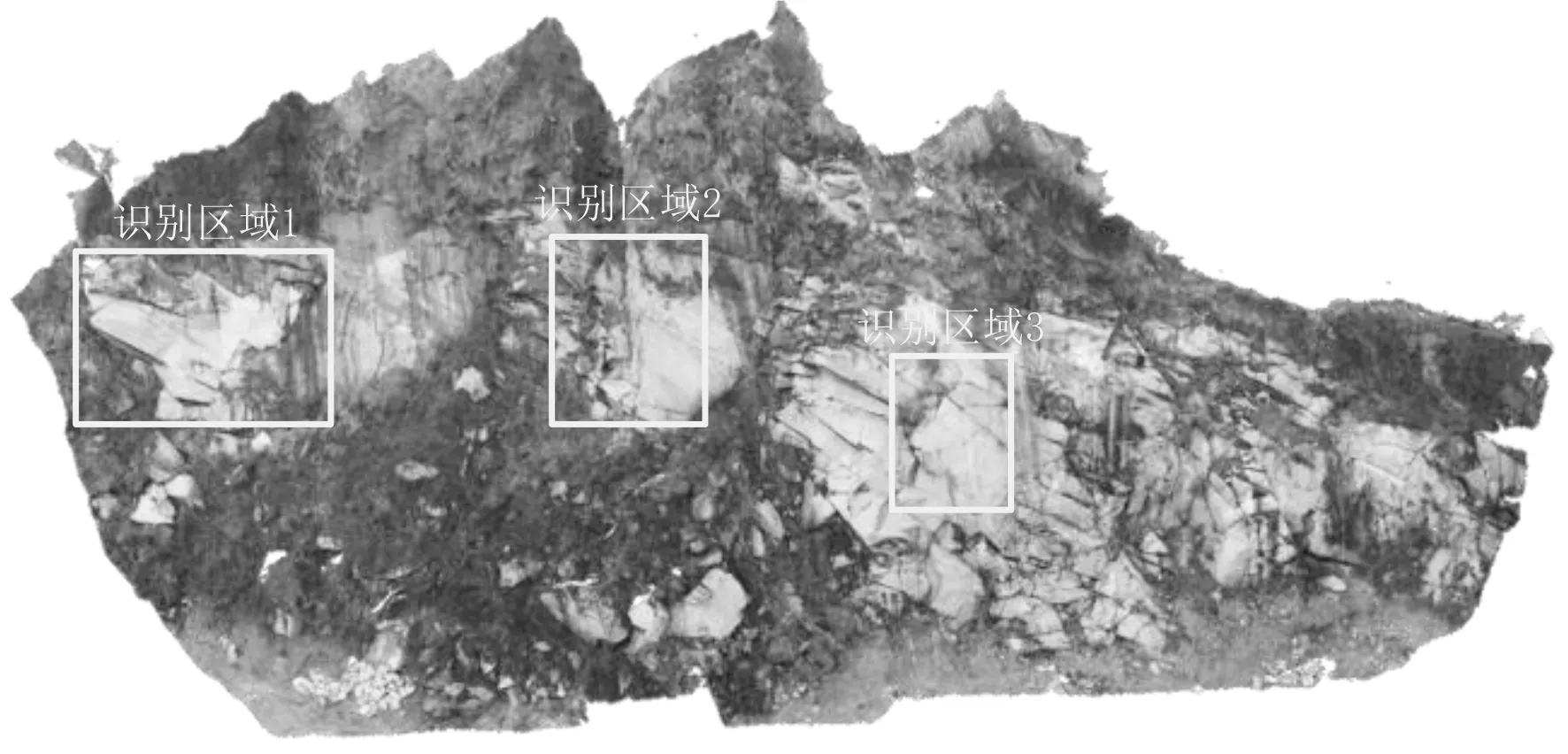
图10 丁字镇三维边坡模型Fig.10 Slope 3D model of Dingzi town

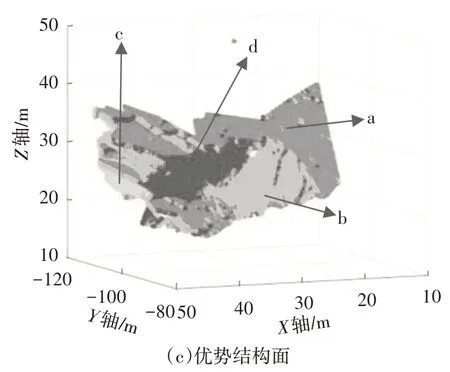
图11 区域1Fig.11 Area 1
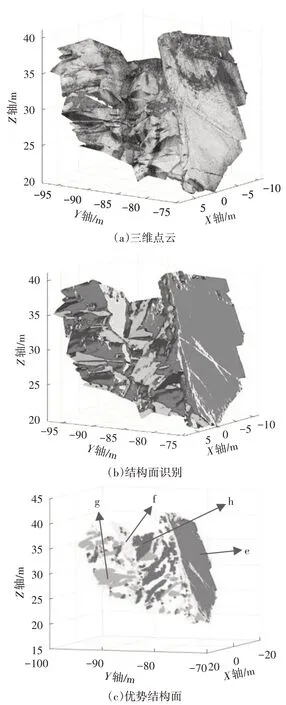
图12 区域2Fig.12 Area 2

图13 区域3Fig.13 Area 3
3.3 优势结构面判识及其对边坡稳定性影响分析
对以上3 个重点区域的优势结构面进行编录,其中结构面a的产状为108.5°∠68.2°,结构面f的产状为108.4°∠68.3°,产状基本一致,因此应当划分为同一组优势结构面,编录结果如表2 所示.将区域1 内结构面的产状绘制于赤平投影极点图中,如图14 所示.图14(a)中展示了区域1 的三维点云中各点所具有的产状的分布,分布密集之处即为优势结构面的产状.图14(b)中将点云划分成了有限个区域,且每个区域内的所有点认定属于同一个结构面.以不同区域内极点的集中程度可构建类似于等高线的势图,以势图中的各位置的高度可直观地判断发育最为良好的优势结构面所在及其产状,如图14(c)所示.

表2 优势结构面编录结果Tab.2 Preferred plane information statistics
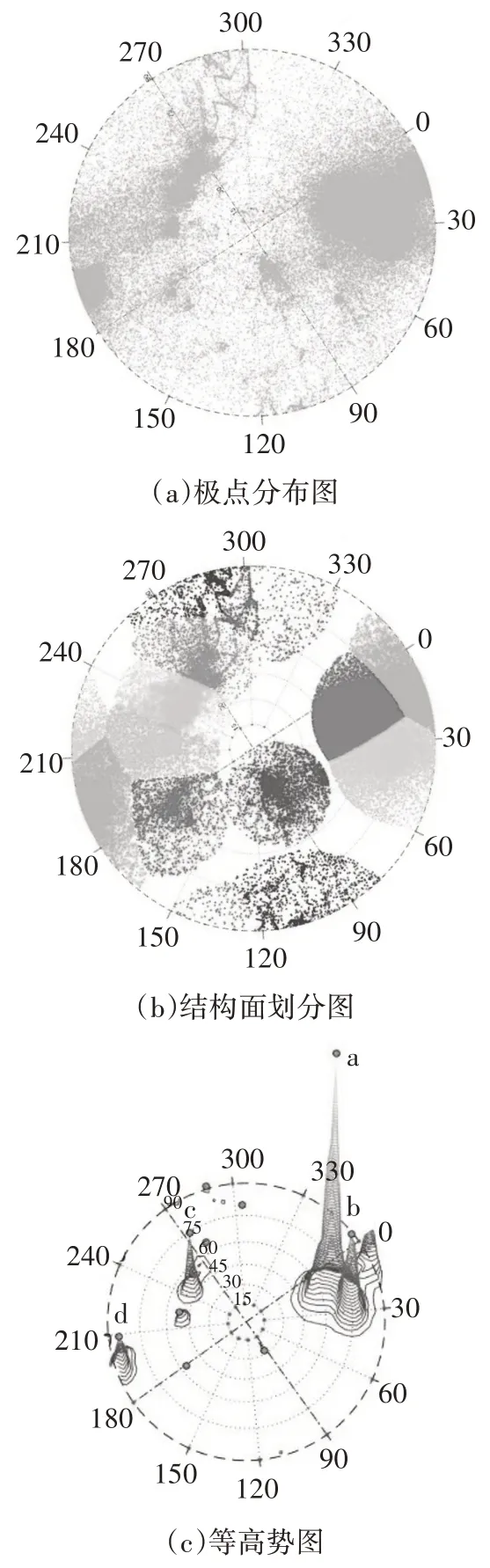
图14 区域1赤平投影极点图Fig.14 The structural plane stereographic projection of area 1
在边坡工程中,基于结构面产状可对边坡的稳定性进行定性分析,顺坡往往容易产生崩塌、落石,逆坡较为稳定.就该研究区域而言,边坡整体走向为38.6°,倾向为128.6°,坡角为77.7°.如图11(c)、图12和图13(c)所示,根据优势结构面编录结果,结构面c与结构面h 的倾向与边坡倾向分别具有203.4°及93.0°的夹角,可判定为此边坡的内倾结构面,对边坡的稳定性影响不大.内倾结构面一般不应出现在坡面上,由于该区域此前为废弃采矿场,因此在结构面c 及结构面h 处应产生过崩塌或落石,导致岩石块体松动脱落,应密切注意附近是否存在其他危岩.h 结构面倾向与边坡倾向具有87°夹角,可判定为逆倾结构面,对边坡的稳定性影响不大,同理c 结构面也为逆倾结构面.由点云的密度分布结合模型图像,可认为a、e、i结构面是边坡内发育最为良好的结构面,且其倾向均接近于边坡,可判定为顺坡,其倾角均超过65°且小于坡角,因此仅在自重的荷载下理论上存在着崩塌倾倒的风险,应重点进行监测和支护.b、f、g、j结构面从出露面的角度观察发育并不是十分良好,但其倾向均与边坡接近,存在着一定的风险.
结合以上分析及边坡结构面编录结果,本研究区域内存在7 组有风险的结构面,其在恶劣气候下极易引发山体滑坡等灾害,在工程支护中需要重点进行加固与防范.
4 结论
本文利用无人机贴近摄影测量技术获取到高分辨率的边坡图像,并以此构建了精细化的三维模型,结合Knn 聚类算法及PCA 主成分分析算法实现了边坡结构面半自动识别和分析,并应用到实际工程中.主要结论如下:
1)无人机贴近摄影及SFM 算法能够获取高陡边坡高分辨率图像及三维模型和三维点云,其三维模型精度优于2 cm.
2)基于Knn 聚类算法及PCA 算法的边坡结构面识别方法,能够精确提取高陡边坡的结构面,识别结构面形状、位置、产状等要素,其倾向及倾角的识别误差分别小于3°和2°.
3)此方法可以有效地对高陡边坡进行产状识别与测量,将其绘制成赤平投影极点图以分析边坡重点区域的优势结构面,编录边坡的结构面识别结果可应用于定性的边坡稳定性分析及支护方案设计.
猜你喜欢
建材发展导向(2022年20期)2022-11-03
导航定位学报(2022年5期)2022-10-13
建材发展导向(2022年4期)2022-03-16
建材发展导向(2021年22期)2022-01-18
科学与财富(2021年36期)2021-05-10
中学生数理化·高三版(2019年1期)2019-07-03
中学生数理化·高三版(2019年1期)2019-07-03
华东师范大学学报(自然科学版)(2018年3期)2018-05-14
电子技术与软件工程(2016年24期)2017-02-23
试题与研究·高考数学(2016年1期)2016-10-13