船舶中压直流系统中模块化多电平变换器的并联拓扑与控制优化
2022-09-30 02:45:06郭燚郭明涵胡中柏
上海海事大学学报 2022年3期
郭燚,郭明涵,胡中柏
(上海海事大学物流工程学院, 上海 201306)
0 引 言
随着船舶电网电压等级不断提升,中压直流(medium voltage direct current,MVDC)电力系统成为舰船电力系统发展的热门研究方向。与传统中压交流电力系统相比,MVDC电力系统具有更高的能量传输效率。模块化多电平变换器(modular multilevel converter,MMC)具有直接控制直流电流的能力,而且可扩展性强、导通损耗低,在MVDC电力系统中得到了广泛应用。MMC还可以避免功率开关器件直接串联结构,增强MVDC电力系统的可靠性和恢复性,这使得MMC在MVDC电力系统中具有良好的应用前景。
MMC子模块的拓扑结构主要有半桥子模块、全桥子模块和箝位双子模块,其中全桥子模块和箝位双子模块具有直流故障穿越能力。船舶对电力系统安全要求较高,在大功率直流断路器大规模应用于MVDC系统之前,针对MMC运行过程中可能存在的直流故障问题,使用具有直流故障穿越能力的MMC子模块是一种可行的解决办法。从实际层面出发,全桥子模块在船舶MVDC领域具有更广泛的应用。对于全桥子模块的MMC调制策略主要有载波移相调制、最近电平逼近调制(nearest level modulation,NLM)等,其中:载波移相调制的优点为等效开关频率高、损耗分布均匀;NLM的优点为原理简单,不受子模块拓扑结构限制,因而多用于子模块数较多的高压型MMC。MMC调制策略会因拓扑结构和应用场景的不同而产生差异,在接入大功率负载时使用载波移相调制的全桥子模块的损耗比使用NLM的小,因此选取载波移相调制作为本文的MMC调制策略。
在MVDC电力系统中,输出的电压等级基本固定,在接入较大功率的负载时船舶发电机输出电流较大,因此在整流过程中每个子模块需要承担很大的桥臂电流。然而,受限于开关器件自身导通电流的能力,MMC有限的传输容量导致大功率传输不易实现。对此,本文优化了一种应用于船舶环形MVDC大功率电力系统的并联MMC结构,在满足稳定输出的同时使MMC各桥臂中开关元件承担的电流减小。首先,研究子模块数对系统的影响,为模型建立提供基础。其次,针对并联MMC结构提出一种结合内模控制的协调控制策略,进行MMC内部和MMC之间的环流抑制。最后,在MATLAB/Simulink中建立船舶并联MMC-MVDC电力整流系统模型,来验证基于内模控制的协调控制策略的有效性以及整流模型的动态性能。
1 船舶MVDC电力系统中并联MMC拓扑结构
1.1 船舶环形MVDC电力系统
船舶环形MVDC电力系统是一种新型的船舶电力系统(见图1),具有占用空间少、效率高的特点。该模型有2台额定功率为36 MW的主发电机和2台额定功率为4 MW的辅助发电机,这4台发电机发出的交流电经过MMC整流后为环形MVDC母线输送能量。其中环形母线电压可在1~35 kV范围内选择,本文主要针对5 kV的MVDC电力系统进行MMC拓扑优化和控制策略设计。

图1 船舶环形MVDC电力系统结构
1.2 MMC基本结构
MMC由三相六桥臂组成,每相都由上下2个桥臂共2个子模块与电感级联而成,因此具有良好的对称性,见图2。图2中:SM为子模块;表示直流母线电压;表示MMC第(∈{,,})相输入电流;p、n分别表示每相的上桥臂、下桥臂电流。由于三相桥臂的对称性,总直流电流在3个相单元之间平均分配,每个相单元中的直流电流为3。又因为上桥臂与下桥臂电抗器电感大小相等,所以交流电流在上桥臂与下桥臂间均分,这样每相上桥臂、下桥臂电流分别为

图2 并联MMC结构示意图

(1)

(2)
式中:为MMC交流相电流幅值;为功率因数角;为基波角频率。
当传输大功率时,为防止桥臂电流过高造成器件无法正常运行,需要将多个MMC并联进行分流。针对5 kV的应用场景,本文设计了使用2个MMC并联的模型,其基本结构见图2。由于MMC模块具有很强的对称性,故2个MMC的每相桥臂所承担的电流为

(3)
(4)
这有效减少了每个MMC桥臂承担的电流,达到传输大功率的目的。
1.3 MMC环流分析
在MMC的上桥臂和下桥臂电流中,除了包括直流侧输出的功率分量外,还有一部分谐波分量。该分量仅在MMC内部和MMC之间流通,而对其直流侧和交流侧的功率输出没有影响,一般称此电流分量为环流。MMC内部环流主要是因为上桥臂和下桥臂子模块电压不稳定导致相互间不均衡而产生的,见图3,其中,s(=,,)为交流测的相等效电压。
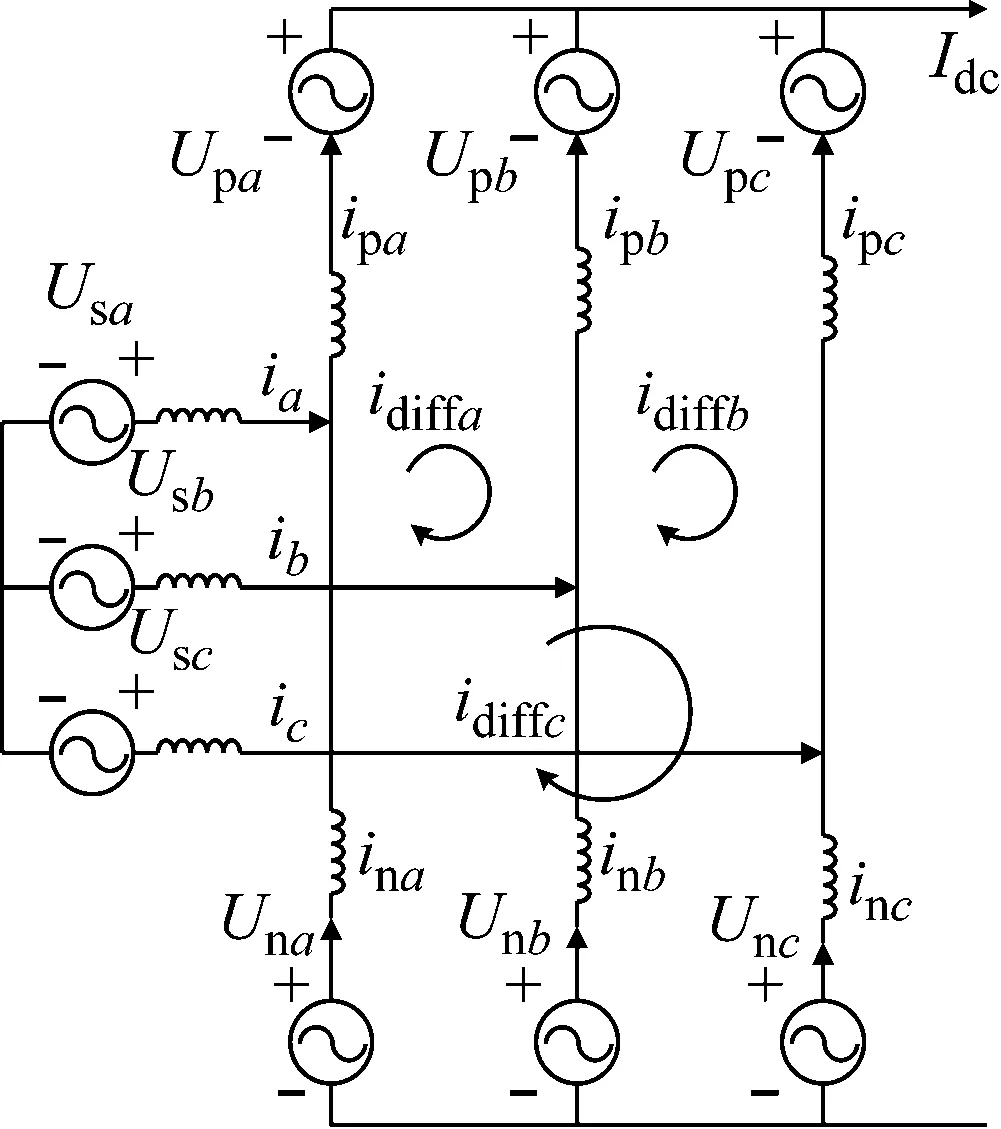
图3 MMC内部环流等效示意图
内部环流diff可定义为

(5)
根据文献[12]可得到,环流是由直流分量和交流分量组合而成的,其中交流分量为

(6)
式中:为电压调制比;为电流调制比;为交流侧的基波角频率。可以看出交流分量以2倍频能量为主,因此MMC内部环流可再定义为

(7)
式中:为二次谐波环流幅值;为初相角。
2个MMC之间的环流主要也是由于相互间电压不均衡产生的,为便于分析,对并联结构进行化简。根据文献[13-14]得到并联MMC的等效电路理论模型,见图4。其中和为控制常数,由系统结构变换而来,因此可以定义2个MMC之间的环流为

图4 并联MMC零序环流等效简化示意图
==-=1+1+1=
-(2+2+2)
(8)
环流叠加在各相的上桥臂电流或下桥臂电流中,既会使功率开关管损耗增加,又会提高功率开关器件额定电流容量,增大系统成本,因此进行环流抑制很有必要。MMC系统结构不对称会造成更大的环流,因此在拓扑优化时应使并联的2个MMC保持相同的结构,且MMC内部三相之间和上下桥臂之间的结构也应保持对称。
2 并联全桥MMC结构设计
并联MMC拓扑结构选取的是全桥子模块,见图2。MMC并联结构在船舶MVDC电力系统中应用时,应确保双MMC并联结构中两个MMC的参数完全一致。针对适合船舶MVDC大功率电力系统的特点,分析并联全桥MMC整流器的子模块数、子模块电容以及桥臂电抗的选取,并对不同子模块数下模型的直流电压波动、传输效率、交流侧影响以及成本进行综合考虑,得到船舶并联MMC-MVDC(5 kV)电力整流系统的最优子模块数、电容值和电感值。
2.1 MMC子模块电容值设计
MMC的子模块直流电容分布在各桥臂中,见图2。桥臂与桥臂之间的子模块电容相互独立,桥臂内的电容也相互独立。在MMC整流过程中,子模块电容通过充放电实现能量流动,保证整流器输出的直流电压处于稳定的状态;电容也可以起到滤波的作用,消除低次谐波使母线电压稳定。电容过大则调节会较缓慢且成本增加,电容过小则难以限制电压的波动,因此电容参数的设置对系统具有很大的影响。子模块电容选取要求电压波动不超过5%。选取相进行分析。设MMC交流侧线电流峰值为,相电动势为,MMC的电压调制比为,电流调制比为,则有
(9)

(10)
且调制比应满足
cos=2
(11)
对相的电压和电流进行积分,得子模块电容值为

(12)
式中:为MMC的视在功率;为电容平均电压。可知,针对不同子模块数需要不同的电容值。
2.2 桥臂电感值设计
在MMC主电路中,桥臂电感是与子模块串联在每个桥臂上的,这是因为MMC自身会对发电机端输送谐波,而桥臂电感不仅可以进行滤波,而且会抑制环流的产生。然而,电感过大会造成电流相位偏移。电感可以按照以下公式选择:
(13)
式中:为环流分量的幅值,一般取桥臂电流基波分量的15。电感值并不完全固定,可根据具体系统特性进行适当的更改。
2.3 MMC子模块数选取
在子模块数特性实验前,需要根据模块数选取MMC主电路参数、桥臂电感值和子模块电容值。子模块中IGBT内阻设为0.01 Ω。本文选取子模块数从2到10进行仿真实验,电源选择2 250 V/240 Hz的理想三相交流电,负载为9 MW阻性负载。子模块数不同的并联MMC-MVDC电力整流系统模型的特性见表1(其中THD为总谐波畸变率(total harmonic distortion))。
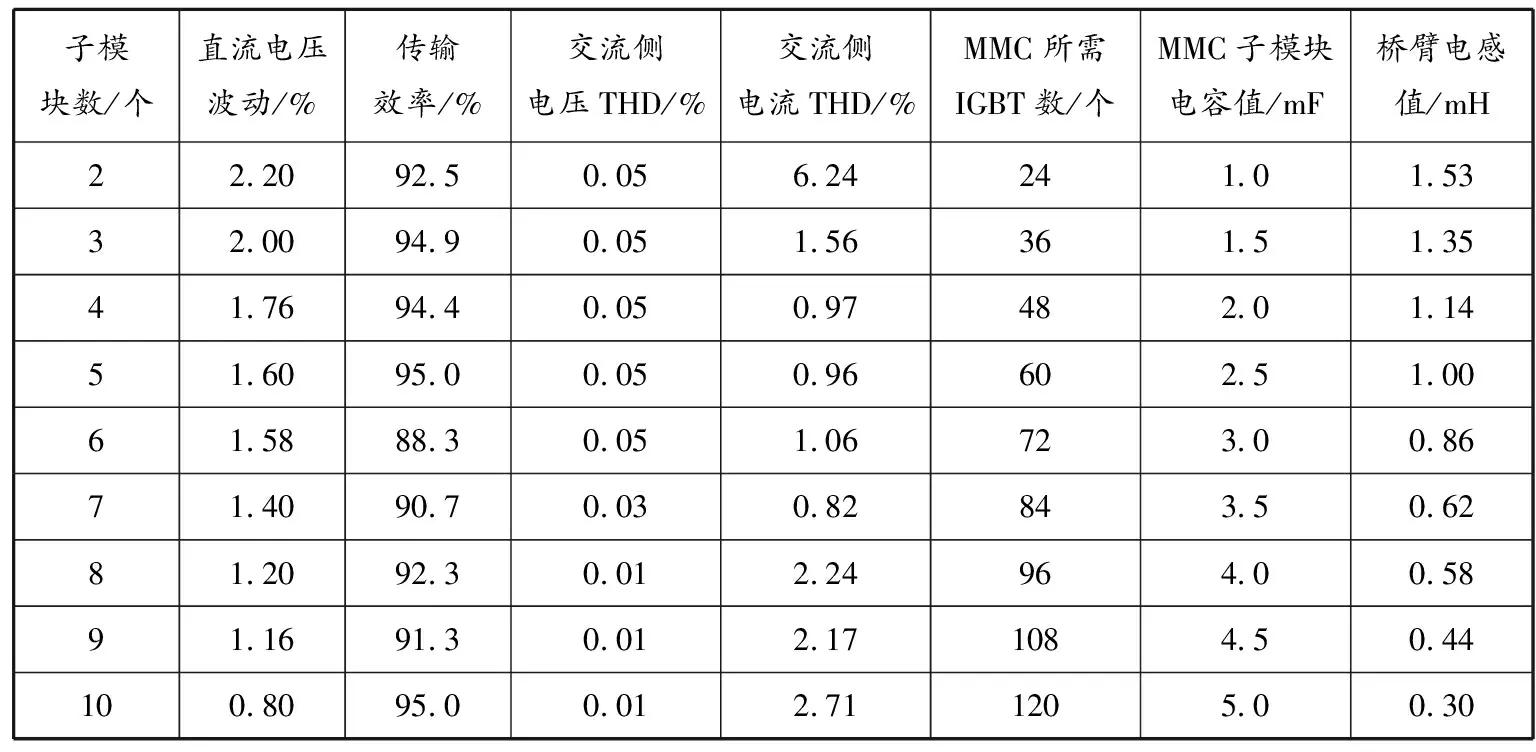
表1 子模块数不同的并联MMC-MVDC(5 kV)电力整流系统模型的特性
根据表1的直流电压波动特性,可以得到子模块数对输出直流电压的影响,见图5。由图5可以看出,随着子模块数的增加,电压波动越来越小,子模块数与输出直流电压质量成正比,且都小于5%,满足船舶稳态运行的要求。
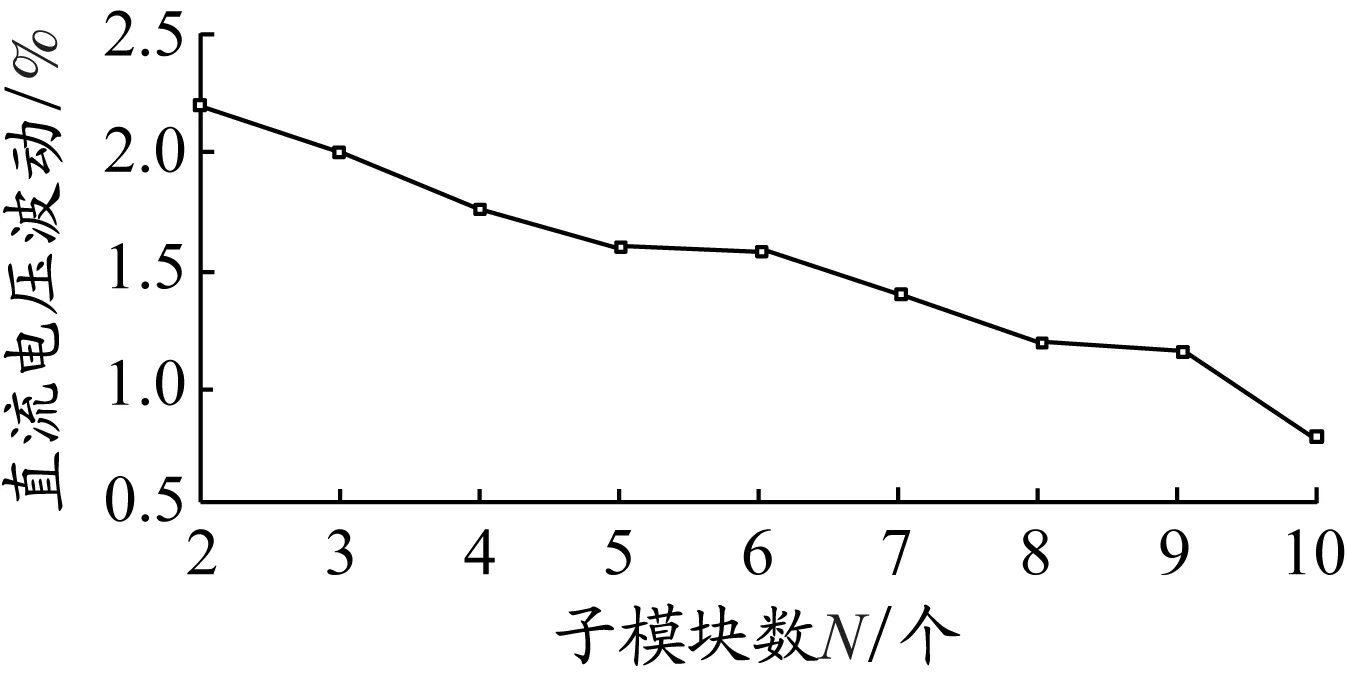
图5 子模块数对输出直流电压的影响
根据表1的传输效率特性,可以得到子模块数对传输效率的影响,见图6。由图6可知,当子模块数超过5之后,随着子模块数的增加,传输效率并不会增加,反而呈现下降的趋势。这是因为虽然输出电压质量提高,但是子模块数的增加会加大开关损耗。虽然=10时与=5时的传输效率接近,但是成本远比=5时的高。

图6 子模块数对传输效率的影响
因为MMC可以进行双端能量流通,所以需要考虑其对交流侧的影响。由图7可看出:子模块数对交流电压几乎无影响,THD都在1%以下;当>7时,对交流电流THD的影响呈增加趋势,但是交流电流THD也均小于3%,都符合船舶稳态运行要求。
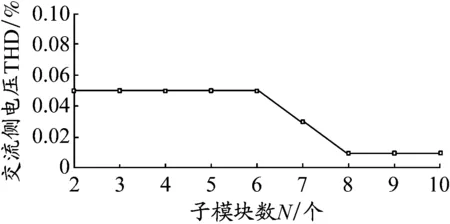
a)电压THD
在不考虑冗余的情况下,假设MMC每个桥臂的子模块数为,船舶MVDC电力系统母线电压为,子模块平均电压为,则当忽略桥臂阻抗压降时,应有
≤
(14)
综上所述,当选择母线电压为5 kV时,MMC传输有功功率36 MW,使得IGBT流经的最大电流不超过3 600 A。结合子模块特性和成本,本文选择=5的全桥子模块拓扑结构,在MATLAB/Simulink中搭建并联MMC整流模型。
3 并联MMC控制策略
并联MMC的协调控制系统主要分为3部分(见图8):一是触发子模块的载波移相调制策略;二是为得到合适的电压调制波的电压电流双闭环控制器;三是为优化电压调制波的环流抑制控制器和电容能量均衡器。
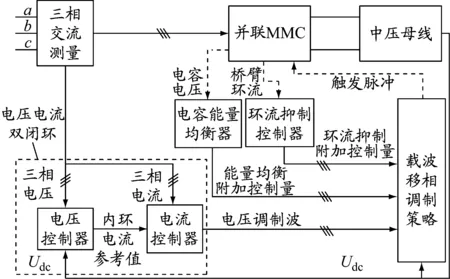
图8 并联MMC系统总控制图
3.1 全桥子模块调制策略
由于MMC中各子模块的参考电压相同,能量分布相对比较均衡,选用载波移相调制有利于子模块电容直流电压平衡,更适合并联MMC拓扑结构。图9为全桥型MMC载波(用表示,=1,2,…,)移相调制示意图,每个桥臂需要两个参考电压和,分别表示FBSM左臂和右臂的参考电压,相位相差π。相邻载波间相位相差π/,上、下桥臂载波之间整体存在相位角。脉冲信号通过参考电压与载波的比较产生,当参考电压大于载波时,输出脉冲宽度调制(pulse width modulation, PWM)开关信号,对应的功率器件导通。当全桥子模块的与(或者与)导通时,对应的子模块电容根据电流方向进行充放电,其余时刻子模块则处于旁路状态。下桥臂参考电压为
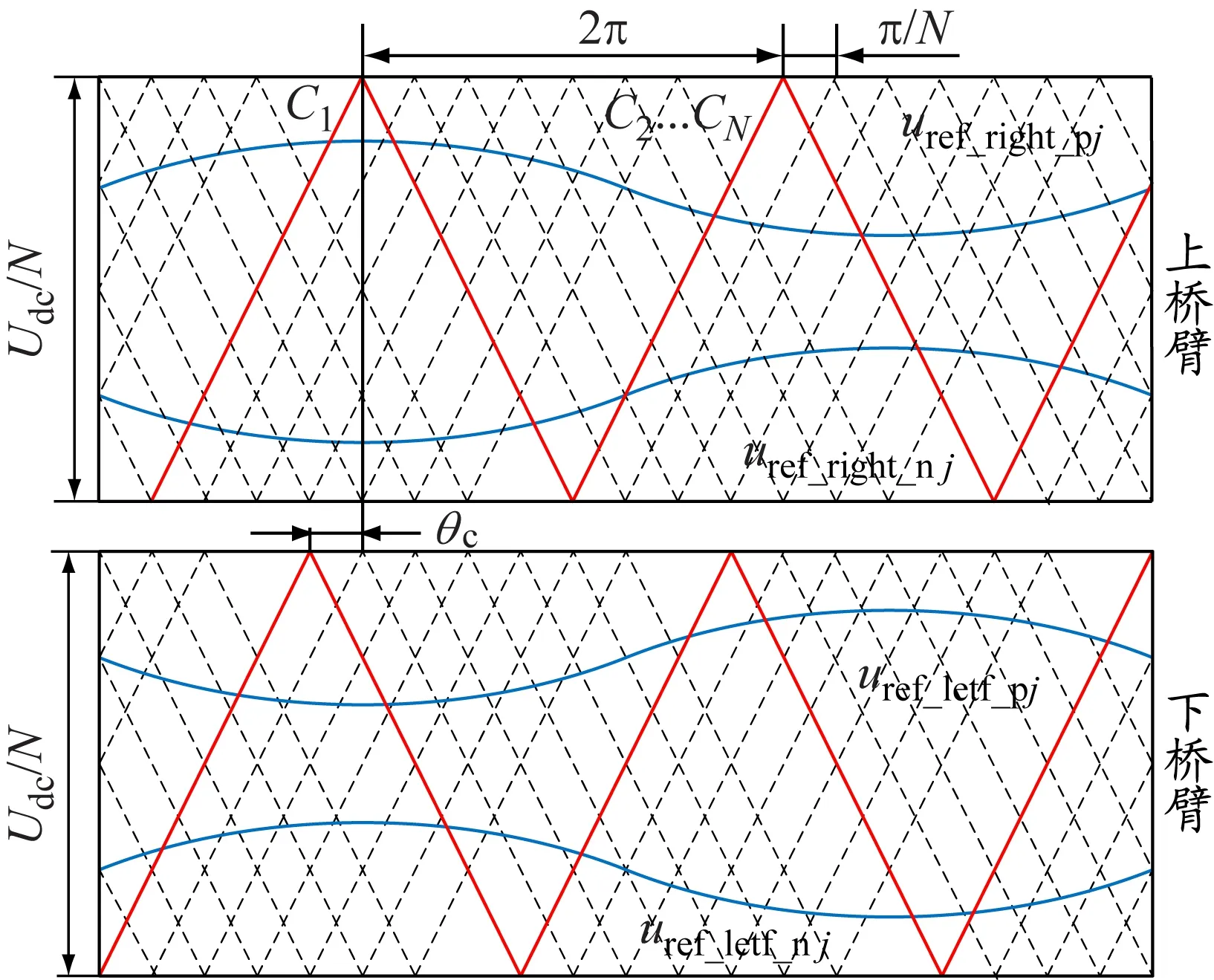
图9 全桥MMC载波移相调制示意图

(15)
上桥臂参考电压为
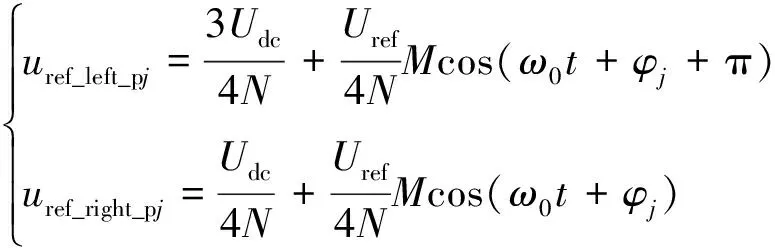
(16)
式中:(0≤≤1)表示电压调制比。采用载波移相调制的关键在于得到合适的参考电压。
3.2 MMC双闭环控制器
针对船舶MVDC电力系统要求直流母线电压保持恒定的特点,可以通过矢量控制方法选取母线电压和无功功率作为外环功率控制器的控制变量,得到内环电流控制器需要的参考电流,从而得到MMC整流器的输出参考电压,见图10。

图10 基于PI控制的MMC电压电流双闭环控制器

3.3 基于内模控制的协调控制
协调控制的目的主要是减少MMC的环流并使子模块能量分布均衡。并联MMC的环流由两部分组成,一个是MMC内部的环流,另一个是并联MMC之间的环流。由第1.3节可以得出,内部环流抑制的主要目的是消除MMC整流器的2倍频能量。内模控制法具有结构简单、参数调节方便和稳态控制良好的特点,并且MMC为1阶系统,更方便建立2倍频环流模型的传递函数。文献[14]提出的一种改进的内模控制环流抑制策略,将低通滤波器引入内模控制器中,从而降低系统对模型误差的敏感度、提高系统鲁棒性。内模控制器的传递函数为

(17)
式中:表示滤波器的时间常数,取值为1;为模拟桥臂电感;为模拟桥臂电阻。可先采用2倍频负序的变换将三相环流分解为2个直流量2f和2f,然后再与参考值相减后分别代入传递函数中得到内部环流抑制电压diff和diff,最后通过变换得到三相的内部环流抑制电压。
2个MMC之间的环流主要为零序环流,可通过控制上、下桥臂开关状态进行控制(由式(8)可知)。经过PI调节后与MMC内部环流抑制相结合,得到环流抑制附加电压diff_ref。控制器结构见图11,其中2为2倍频电流相角。
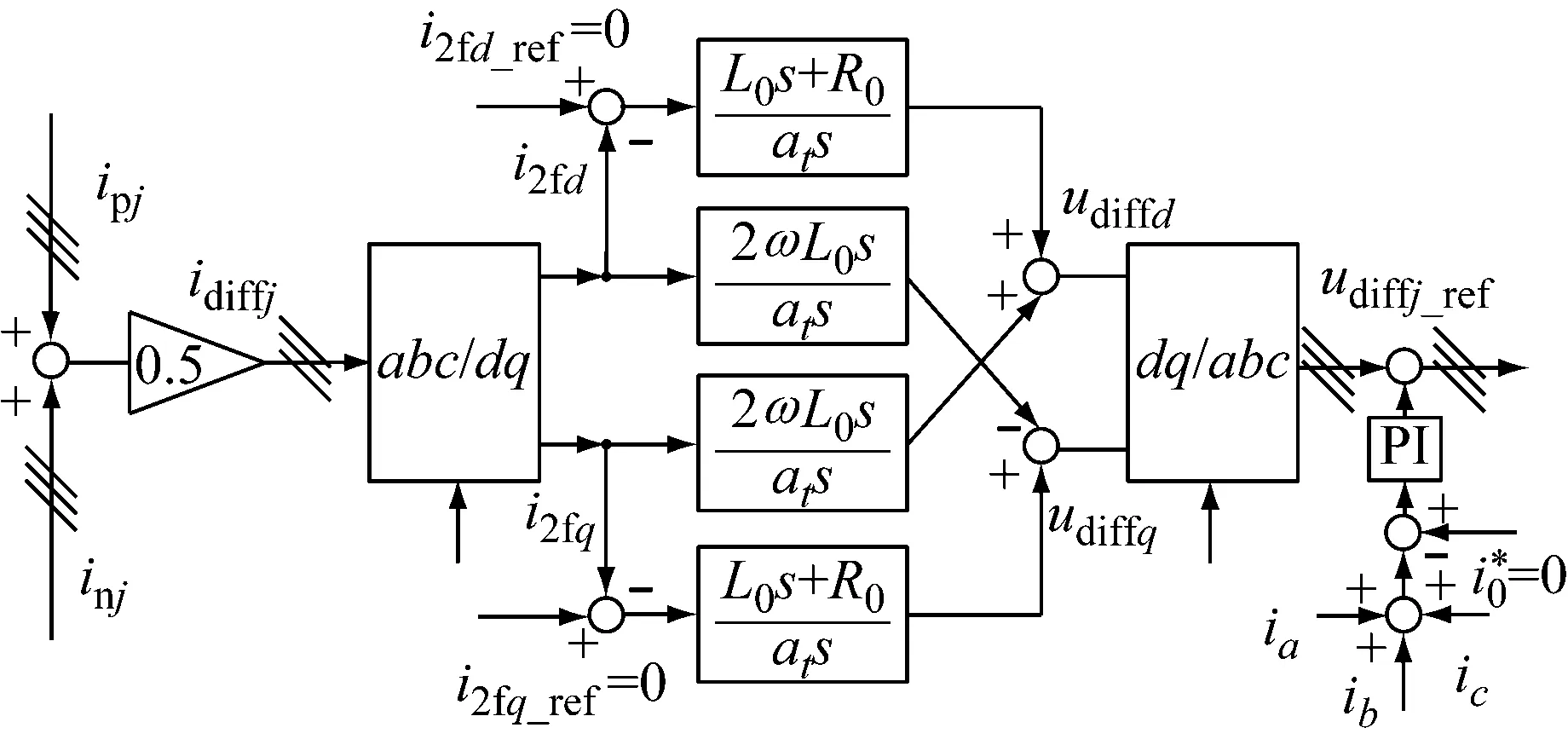
图11 基于内模控制的并联MMC环流抑制控制器

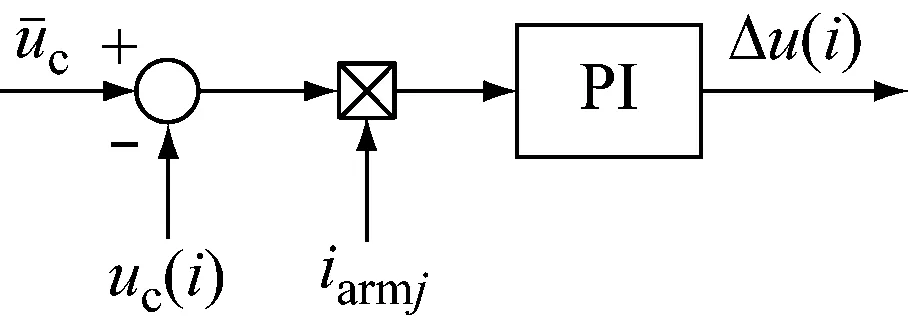
图12 并联MMC子模块电容能量均衡控制器
4 并联协调控制策略仿真验证
在MATLAB/Simulink中建立仿真模型来验证并联MMC协调控制策略的有效性。并联MMC拓扑结构见图4,系统控制策略结构框图见图8。
4.1 系统参数设置
船舶并联MMC-MVDC电力整流系统参数见表2,其中:模拟总发电机额定功率=36 MW,而经过变压器后变压为2 250 V;并联MMC容量为9 MW,额定频率=240 Hz;母线电压=5 kV;子模块平均工作电压=1 kV;子模块电容和桥臂电感由式(12)和(13)推导得出,=2.5 mF,=1 mH。

表2 船舶并联MMC-MVDC电力整流系统参数
4.2 直流电压输出仿真分析
首先对MMC的稳态性能进行分析。图13为输出直流电压波形和交流侧电压电流随时间的变化曲线。0 s时开始运行,首先进行预充电。0.3 s后,直流电压开始稳定,保持在4 960~5 080 V之间,电压波动为±1.6%,其交流侧的THD在3%以内,均在船舶稳态运行可接受范围内。

a)输出直流电压
系统输出的直流电压实际上是由MMC每相的桥臂子模块电容电压叠加而来的,因此子模块电容能量的稳定对输出直流电压的稳定有很大帮助。又因为MMC的结构对称性,所以只选取其中一个桥臂进行分析。图14a和14b分别为协调控制策略添加前后MMC的相上桥臂子模块电压波动情况。
由图14可以看出:协调控制策略添加前,子模块电容电压波动较大,能量分布不均匀;协调控制策略添加后,子模块电容电压受到平均电压限制,趋于/=1 000 V,使得MMC子模块之间的电压差值减小,MMC内部能量趋于均衡。

a)协调控制策略添加前
4.3 并联MMC桥臂分流仿真验证
图15所示为并联分流的对比图,其中:图15a为单MMC的相上、下桥臂电流;图15b为并联MMC的相上、下桥臂电流。因为MMC具有良好的对称性,所以两个MMC中可任选一个分析。从图15可以看出,单MMC的桥臂电流变化范围为-2 200~1 200 A,而并联MMC的桥臂电流变化范围为-1 000~1 000 A,低于IGBT的典型值。结果验证了并联MMC结构可以有效降低MMC的桥臂电流,避免MMC在传输大功率时其内部的IGBT电流过大。在这种并联拓扑结构中,MMC之间的电流能够保持相对均衡,这说明这种结构本身具有均流的特性。因此,并联MMC整流拓扑结构适用于船舶MVDC大功率电力系统。

图15 单MMC和并联MMC的a相上、下桥臂电流
4.4 基于内模控制的环流抑制仿真验证
图16为协调控制环流对比图,其中图16a为控制策略添加前的MMC内部相桥臂环流;图16b为协调控制策略添加后的相桥臂环流;图16c为控制策略添加前的2个MMC之间的环流;图16d为控制策略添加后的2个MMC之间的环流。本文根据文献[13]采用一种环流谐波占比指标来评价环流抑制效果。环流的谐波占比越小,表示该环流抑制效果越好。因为MMC的环流以直流分量为主,本文选择将直流分量作为计算环流谐波占比的基准值。又因为谐波主要为二次谐波,所以本文主要评价两个指标:一个是所有交流谐波有效值与直流分量的比值的总谐波占比;另一个是环流的2倍频交流分量有效值与直流分量的比值的2倍频占比。基于图16所得数据计算评价指标得到表3,可以看出在添加控制策略后,两种环流都得到了有效的抑制。
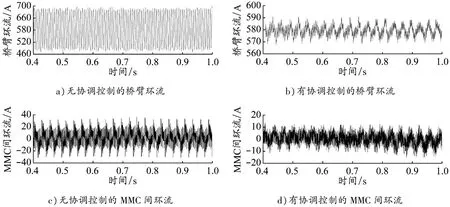
图16 a相桥臂环流对比和MMC间环流对比
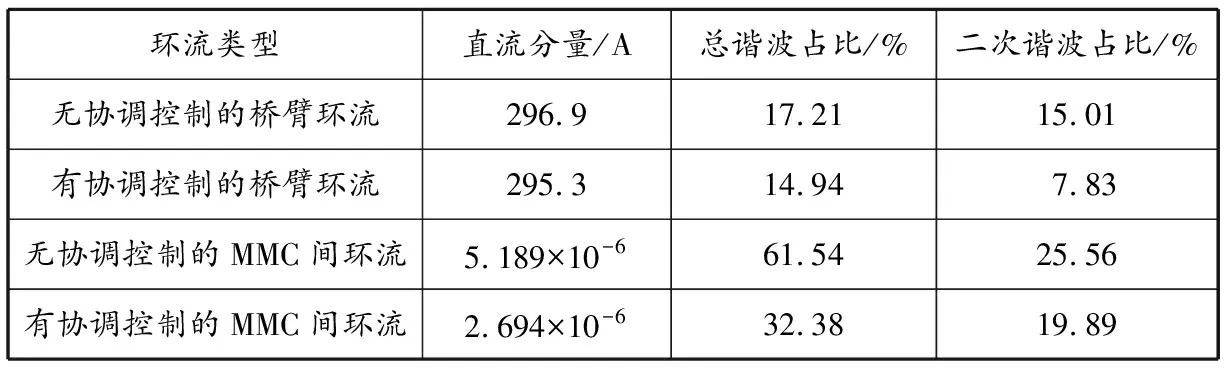
表3 船舶并联MMC-MVDC电力整流系统环流评价指标
4.5 并联MMC整流器在动态负载下的性能分析
为分析MMC整流器带动态负载时的能力,在0 s时系统进行预充电,0.5 s时带18 MW负载启动,在系统输出稳定后,于1 s时突加负载至36 MW,结果见图17。图17a显示,交流侧三相电流随着负载功率的增加而增大。图17b显示,MMC整流器对发电机发出的交流电压基本无影响。图17c显示,突加负载后经过1.5 s并联MMC整流器输出的有功功率才平稳。有功功率平稳时的效率仅约95%,并联MMC整流的损耗率约5%,而高压系统损耗率仅为1%。图17d显示,在0.5 s时直流电压达到稳态,在1.0 s时突加负载后直流电压的波动范围满足了船舶MVDC电力系统母线电压5%波动的要求。
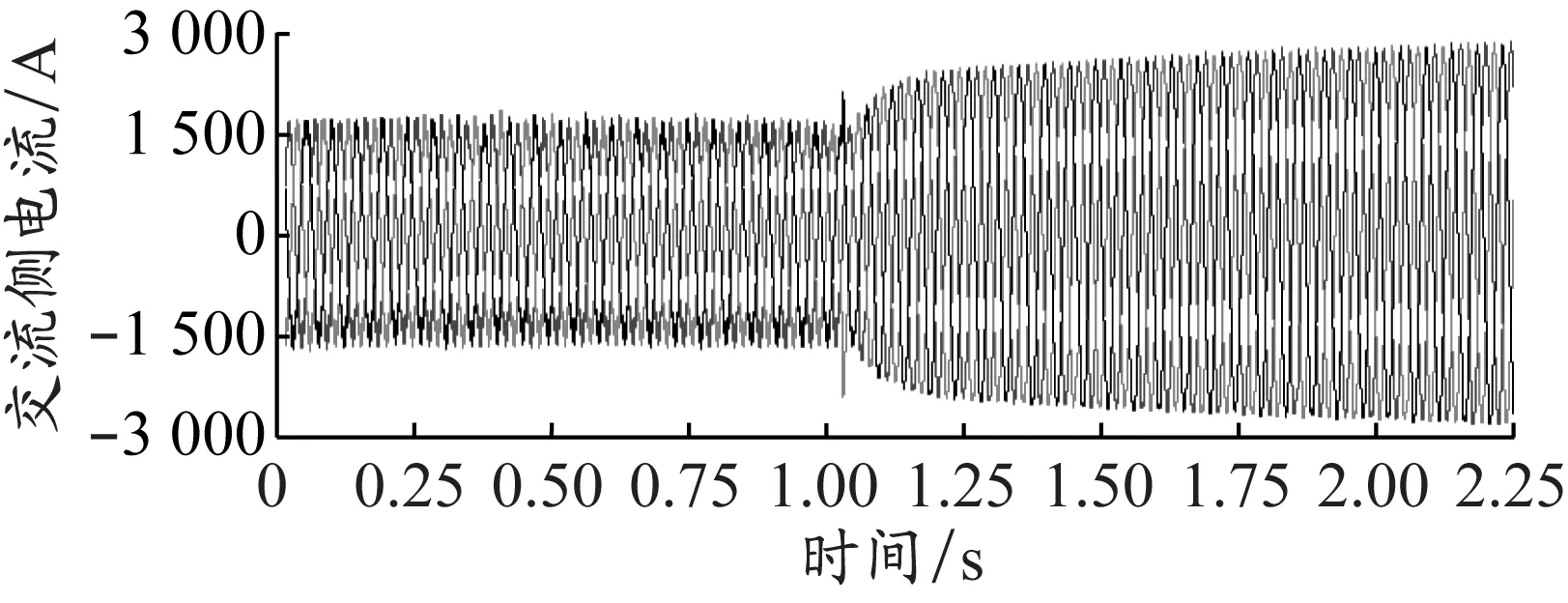
a)交流侧三相电流
综上可知:在添加基于内模控制的协调控制策略后,直流输出电压和交流侧THD在稳态和动态性能上都满足要求;MMC内部的环流和MMC之间的环流都有所减少,避免了环流增加所导致的内部损耗的增加;各子模块能量保持均衡,能够节省能源、延长器件使用寿命,但是在添加动态负载时效率较低。
5 结 论
本文针对船舶中压直流(MVDC)电力系统中模块化多电平变换器(MMC)桥臂承担电流较小的问题,优化了一种适用于船舶中压直流条件下的并联MMC拓扑结构,并提出一种相适应的协调控制策略。首先设计了并联MMC的器件参数,并通过仿真研究子模块数对直流电压波动、传输效率、交流侧总谐波畸变率(THD)的影响,得到船舶MVDC(5 kV)电力系统的优化全桥子模块结构,为系统建模提供基础。然后,从原理上分析了并联MMC环流的产生原因,设计了一种基于内模控制的协调控制策略。最后,建立了船舶并联MMC-MVDC电力整流系统模型,进行了稳态性能与动态性能测试,验证了所提调制策略的有效性。本文研究存在两个方面不足:一方面,船舶并联MMC-MVDC电力整流系统模型不够精确,处于理想状态;另一方面,在5 kV工况下并联MMC整流效率仍然较低。
猜你喜欢
电工技术学报(2023年16期)2023-08-30 02:44:26
粮食问题研究(2022年2期)2022-04-25 22:50:57
中学生数理化·中考版(2021年10期)2021-11-22 07:26:40
中国实用神经疾病杂志(2018年9期)2018-05-25 01:01:08
数学物理学报(2018年2期)2018-05-14 07:32:01
中国环境监察(2016年7期)2016-10-23 05:36:30
儿童故事画报·智力大王(2016年6期)2016-09-14 07:12:55
通信电源技术(2016年1期)2016-04-16 04:57:26
通信电源技术(2016年5期)2016-03-22 01:09:37
电气传动(2015年4期)2015-07-11 06:10:56