在随浪、尾斜浪下ONR舰船骑浪横甩直接数值模拟
2022-09-30 02:45张宝吉王吴锐
上海海事大学学报 2022年3期
张宝吉,王吴锐
(上海海事大学海洋科学与工程学院,上海 201306)
0 引 言
航行中的船舶如果被尾斜浪或随浪从其后方接近并捕获,则会以波速前进,这种现象称为骑浪。如果进入骑浪状态的船舶打出最大舵角,则巨大的离心力会使船舶无法保持航向,这种现象称为横甩。横甩会导致船舶的倾覆概率大大增加。由于骑浪横甩具有强非线性,其机理和过程相当复杂,所以研究者相对较少。
ONR(office of naval research)舰船是一种内倾船,是实验和研究常用的一种舰船,其骑浪横甩也因其特殊性而不同于常规船舶。MAKI等基于骑浪横甩第二层薄弱性衡准,采用Melnikov法预报了ONR舰船骑浪的阈值问题。CARRICA等基于计算流体力学(computational fluid dynamics,CFD)软件CFDShip-Iowa研究了ONR舰船在随浪下发生横甩的阈值,发现使用一个改进后的自动驾驶系统可以在一定程度上防止横甩的发生。SADAT-HOSSEINI等使用CFD软件对ONR舰船模型进行骑浪、横甩和周期性运动的预测,预报结果与实验值表现出较高的吻合性。SADAT-HOSSEINI等使用CFD软件、拖曳水池和非线性动力学研究了ONR舰船在有和没有舭龙骨两种情况下的参数横摇和横甩问题,得到的研究结果与实验结果十分相似。UMEDA等通过理论和实验研究了ONR舰船在不规则波中发生横甩的概率。王廷昊从机理上研究了骑浪横甩的非线性动力学特性,并进行了横甩的数值模拟。处于骑浪状态的船舶,当其艏摇角不断增大时,其横摇角可能瞬时达到最大值,导致其运动状态突然发生改变,这时即使打出最大舵角也无济于事,因此可以利用这种突然改变的理念来模拟横甩运动。由以上研究可知,国内外学者对ONR舰船的骑浪横甩进行了大量的模型实验和数值模拟研究,而数值模拟主要以CFD软件为主,成本高、计算时间长,实用性不太强。因此,本文从船舶设计和评估实际出发,基于MMG(maneuvering mathematical model group)四自由度操纵性方程,定义船舶在波浪上的运动状态,通过改变舵角控制方程增加艏向角和横摇角作为横甩的判断条件,基于突然改变理念模拟ONR舰船的横甩现象,并与已有的实验数据进行对比。本文的研究成果可为第二代完整稳性中骑浪横甩的研究提供技术支持。
1 随浪、尾斜浪中骑浪横甩模型
骑浪横甩是一种特殊的运动形式,这种形式会使垂荡和纵摇两个自由度上的运动较其他运动形式有更高的自然频率。一艘高速船在尾斜浪中被捕获后,就可能发生横甩。在这种情况下,垂荡与纵摇的遭遇频率会大大降低,而纵荡、横荡、横摇、艏摇运动就会有显著的响应。只要简单地跟踪垂荡和纵摇运动的稳定平衡点,就可以用少量的计算去逼近它们。同时,由于垂荡与纵摇遭遇频率低,所以作用在船上的水动力主要有波浪诱导力、水动力升力和浮力。在骑浪横甩模型中,波陡(=,这里、分别表示波高和波长)远远小于1,因此可以假定由波浪引起的漂移角和无因次偏航率与波陡一样小,波浪对纵荡和艏摇的影响可以忽略。因此,本文研究所使用的数学模型是加入了线性波浪诱导力的机动模型,采用四自由度(纵荡、横荡、横摇、艏摇)操纵性方程。
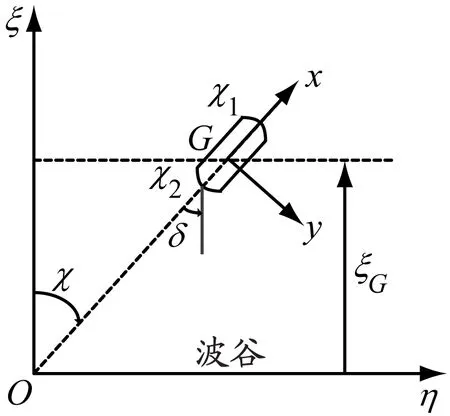
四自由度操纵性方程的坐标系见图1:点在波谷;轴的正方向与波的传播方向一致,指向船首;轴的正方向指向右舷方向;轴的正方向竖直向下。在这个模型中,波浪力和波浪力矩是由细长体理论所计算的波粒子速度与Froude-Krylov力耦合而成的,控制方程如下:
a)俯视图
=cos-sin-
(1)

(2)

(,)+()+
(,)+(,)
(3)

(4)

()+(,)+(,)
(5)

(6)

()+(,)+
(,)-()
(7)
()=--(-)
(8)
式中:为固定坐标系下船舶重心的纵向坐标;和分别为艏向角和设计艏向角;和分别为纵荡速度和横荡速度;为波速;为螺旋桨转速;(,)和()分别为推力和阻力;、、分别代表船体质量、方向附加质量、方向附加质量;和为惯性矩;和为附加惯性矩;、、分别为艏向角速率、横摇角、横摇速率;表示横荡力作用中心位置;为重力加速度;为恢复力臂;为舵角;为舵机常数,取0.63;和分别为艏摇力矩和横摇力矩;、、、分别为波浪纵荡力、波浪横荡力、波浪艏摇力矩、波浪横摇力矩;其余未一一交代的字符中,主字符、、、分别表示纵荡相关量、横荡相关量、艏摇相关量、横摇相关量,下标、、、分别表示横荡速度状态量、艏向角速度状态量、横摇角度状态量、舵角状态量,皆为水动力系数。
波浪力和波浪力矩是将Froude-Krylov力与由波浪粒子引起的作用于船体和螺旋桨的水动力升力进行耦合计算出来的:

式中:为流体密度;为船首在方向上的坐标;为船尾在方向上的坐标;为波数;为波高的一半,即波幅;()为不同站号下船的半宽;()为不同站号下船的吃水;()为不同站号下船的横剖面面积。
螺旋桨推力(,)的表达式如下:
(,)=++
(13)
其中,

式中:为推力减额分数;为螺旋桨的直径;为伴流分数;、、为静水中螺旋桨推力拟合曲线的系数。
船体阻力()可以表示为
()=+++++
(14)
式中:、、、、、是通过对静水阻力实验得到的阻力值进行二次拟合所计算出的拟合系数。
船的附加质量和附加惯性矩的计算公式是使用多元回归方法对日本著名的元良图谱进行分析得到的,水动力系数的计算方法见参考文献[10]。
2 ONR舰船在波浪上运动状态描述
船舶在波浪上的运动状态主要有以下4种:
(1)周期性运动。周期性运动的数学表达式为
()=(+),=2,3,…
(15)
式中:表示周期;代表状态量,即∈{,,,,,,}。
(2)骑浪。骑浪运动的表达式为

(16)
式中所有的量均不随时间变化而变化,意味着到达骑浪状态后船舶的状态将不会随着时间而变化。
(3)横甩。横甩现象可以表示为

(17)
式中:为最大舵角。当船的舵角达到最大时,船的艏摇角速度不为0,并且船舶仍然向反方向或正方向加速,即达到了横甩。
(4)倾覆。船舶的倾覆可以表示为
||>
(18)
式中:是船舶所能允许的最大横摇角,一般取稳性消失角90°左右。
3 改变舵角控制方程
当船舶无法保持原有的航向时,在实际操舵过程中很可能会打出最大舵角来改变航向,但控制方程的计算结果是打出1°的舵角。根据控制方程的计算结果操舵,虽然能够使船舶保持稳定,但无法达到预期的航向。本文所采用的舵角控制方程(即式(8))是一个自航控制方程,本质是PID(proportional-integral-derivative)控制方程。UMEDA提出基于自航控制方程的数值模拟,PID控制不适合表现出最大舵角,并提出如果船舶采用最佳控制方程还是无法保持航向则可认为发生横甩。本文对式(8)进行改善,将横甩的判断平缓化。
将式(8)增加两个控制量,如下:

(19)
式中的作用相当于直接改变。为方便解释加入的意义,式(19)右端计算出来的数值代表舵角的角速度,增大角速度的意义是加快舵角的响应时间,因此,可以通过修改舵角控制方程来加快响应速度。另一个很重要的参数是,计算达到平衡时的舵角就是求解式(19)右端等于零的方程。以航向偏差正1°为例,为保持航向会打出负度而不是-1°,实际效果就是扩大舵角倍数,实际情况是小于度,这是因为当舵角增大后,航向偏差量-会相应减小,需要模拟计算才能得到确切的解,但至少可以增加舵角改变量。
4 ONR船舰骑浪横甩仿真实例
本文选取的ONR舰船的主尺度和船型参数见表1,船型见图2,横剖面见图3。取螺旋桨转速=4.125 r/s,初始船速取=15.725 m/s,=0,纵荡速度取接近于波速;为减少计算时间,横荡速度相对于纵荡速度是个小量,不需要提前计算取值。本例中取预设艏向角为10°,艏向角初始值为10°。

表1 ONR舰船主尺度与船型参数

图2 ONR舰船几何模型
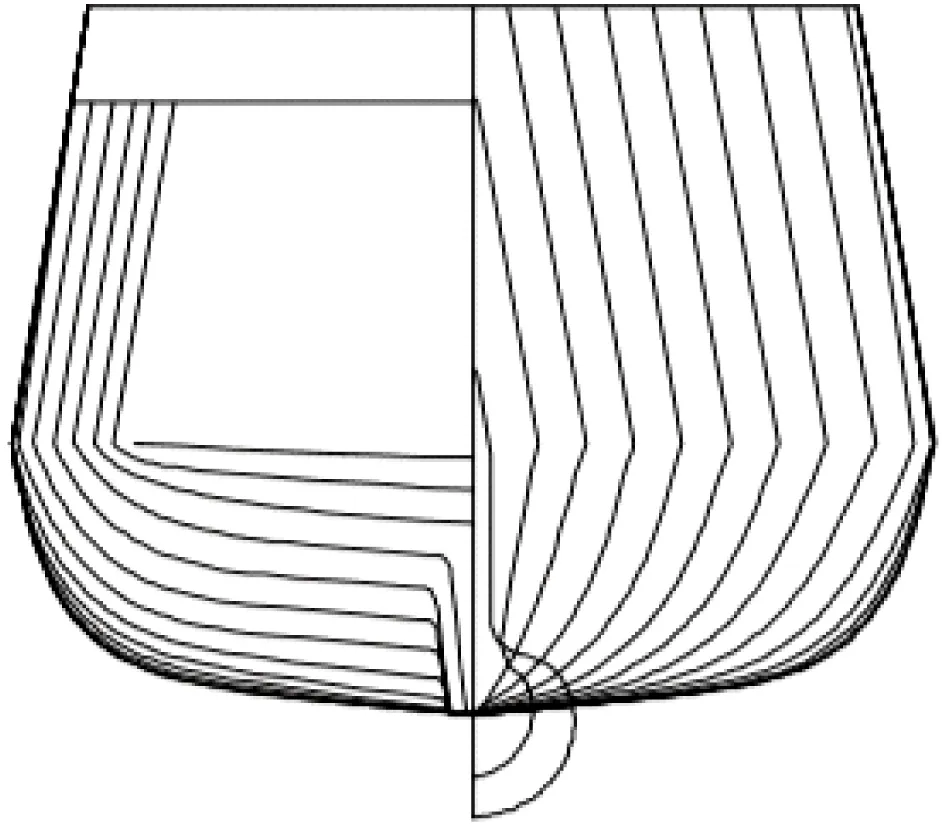
图3 ONR舰船横剖面
当舰船航向角保持为0,螺旋桨转速=4.125 r/s,波长船长比为0.75时,研究ONR舰船在不同波陡下的骑浪运动状态,见图4。由图4可知:在波陡为1/20和1/5情况下,发生了明显的骑浪现象,在其他波陡情况下,都是典型的纵荡运动。由此可知:骑浪的发生是有一定条件的,故在船舶驾驶时需要知道哪些波浪参数对骑浪有影响,由此来规避骑浪的发生。
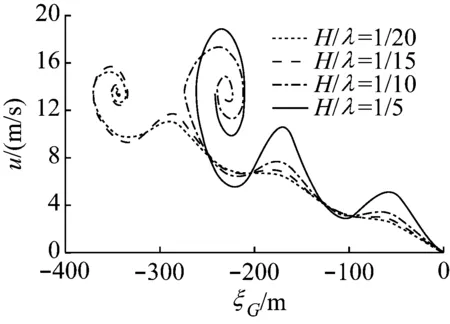
图4 n=4.125 r/s时波陡对骑浪的影响
图5是典型的横甩相图,给定螺旋桨初始极限转速=3.106 6 r/s,浪向角为0,航速逐渐增大,位移不断增加,船舶随浪运动一段时间后,突然将极限转速改为=4.137 3 r/s,并打一个10°的舵角,位移没有再增加,最终螺旋线没有聚焦于一点,船舶由于发生了横甩而倾覆,所以不是骑浪。

图5 ONR舰船典型横甩相图
从图6可以看出:在第1 000 s打出一个小舵角后,船舶的艏向角不断增大;即使打出相反的最大舵角,艏向角仍然增大,最终船舶倾覆,这就是典型的横甩现象。这也进一步证实:骑浪是横甩的先兆;当船舶骑浪时舵效下降,且无法保持航向;当舵角与螺旋桨转速的改变不是突然的,而是平缓的,这些可以认为是横甩不倾覆。

图6 ONR内倾船典型的横甩模拟
图7为ONR舰船在波浪中运动状态的计算值与部分实验值的比较。由图7可知:计算值与实验值的趋势基本是一致的,特别是在周期性运动区域和骑浪区域;横甩的计算结果与实验值差距较大,这主要是由本文的计算过程中忽略了一些扰动力的高阶项导致的。

图7 波长船长比为1.25、波陡为1/20时的计算值与实验值比较
5 结 论
以四自由度MMG操纵性方程为基础,定义了船舶在波浪上的运动状态,通过修正舵角控制方程增加艏向角和横摇角作为横甩的判断条件,基于突然改变理念,成功地模拟出ONR舰船的横甩现象,并将部分计算结果与已有的实验值进行比较,证实了本文所提出的ONR舰船骑浪横甩直接模拟方法的可靠性。由于控制方程中的螺旋桨推力计算采用的是拟合公式,当船舶处于压载航行状态时,螺旋桨会露出水面,对这种情况用该公式去计算推力误差会很大,所以为更加准确地模拟船舶的骑浪横甩运动,接下来将考虑如何用CFD来模拟横甩。
猜你喜欢
中国科技纵横(2020年9期)2020-10-09
教学与管理(小学版)(2020年5期)2020-07-16
航空世界(2019年1期)2019-10-11
师道(2018年6期)2018-07-16
航空模型(2017年5期)2017-12-14
中学科技(2017年10期)2017-11-04
科技视界(2016年19期)2017-05-18
现代企业(2016年7期)2016-05-14
环球时报(2009-09-16)2009-09-16