
基于UDSonCAN的Bootloader设计
2022-09-30 01:58:54陈祖锐廖振伟谷城刘志军刘虎山
汽车零部件 2022年9期
陈祖锐,廖振伟,谷城,刘志军,刘虎山
柳州赛克科技发展有限公司,广西柳州 545005
0 引言
由于TCU在汽车中的安装环境复杂,拆卸TCU硬件十分困难,再加上利用串口、JTAG等交互手段均需要给TCU增加额外的硬件电路,增加开发成本。所以本文参照ISO14229标准的UDS(unified diagnostic services)诊断规范,结合整车厂的诊断规范和软件升级规范需求。设计一套UDSonCAN为基础的TCU软件升级方案,即TCU的Bootloader方案设计。该方案以CAN(controller area network)网络通信为基础,基于UDS诊断服务规范,实现对TCU特定的Flash地址区域进行程序刷新。此方案的实现,在不需要对TCU进行硬件拆卸就可以快速、可靠、稳定地进行TCU软件更新,大大缩短软件开发周期,减少开发成本,提高软件程序的交付质量。
1 Bootloader的介绍
1.1 Bootloader应用UDS服务
ISO 14229标准中准确定义了UDSonCAN的全部诊断服务,包括数据传输服务、通信管理服务、上传下载服务、例程控制模式,且每个服务都有特定的SID(service identify)。
此方案是基于UDSonCAN的Bootloader设计方案,主要用到的UDS服务及其功能概述如下:
(1)诊断会话控制:控制电控单元处于不同的诊断会话模式中。
(2)通过标识符读数据:向电控单元读取特定的信息。
(3)通过标识符写数据:向电控单元写入特定的信息。
(4)例程控制:启动或停止特定的程序。
似乎所有津津乐道的故事都有类似这样一个“风骚”的开始:初识只作乍见之欢。我们似乎都是习惯了喜新厌旧的人,喜欢去新的城市,喜欢探索新的事物,喜欢更换新的物品,喜欢接触新的人……世间的美好,多数在于初见,初见你初妆、初见你笑颜……然而好的事物容易有一个通病,那就是都不长远。越是璀璨,就越是脆弱。花前月下,尘梦如烟,似曾相识,昙花一现!其实,人生难得的是日后久处不厌,如果是,那么,有生之年,有幸遇见。
(5)安全访问:向电控单元请求种子和发送秘钥。
(6)通信控制:开启或关闭电控单元特定报文的接收或发送。
(7)DTC设置控制:停止或恢复电控单元的故障诊断功能。
(8)请求下载:向电控单元请求进行下载服务。
(9)传输数据:向电控单元传输数据。
(10)请求退出传输:向电控单元请求退出数据传输。
(11)ECU复位:向电控单元请求复位操作。
UDS服务对应的SID见表1。
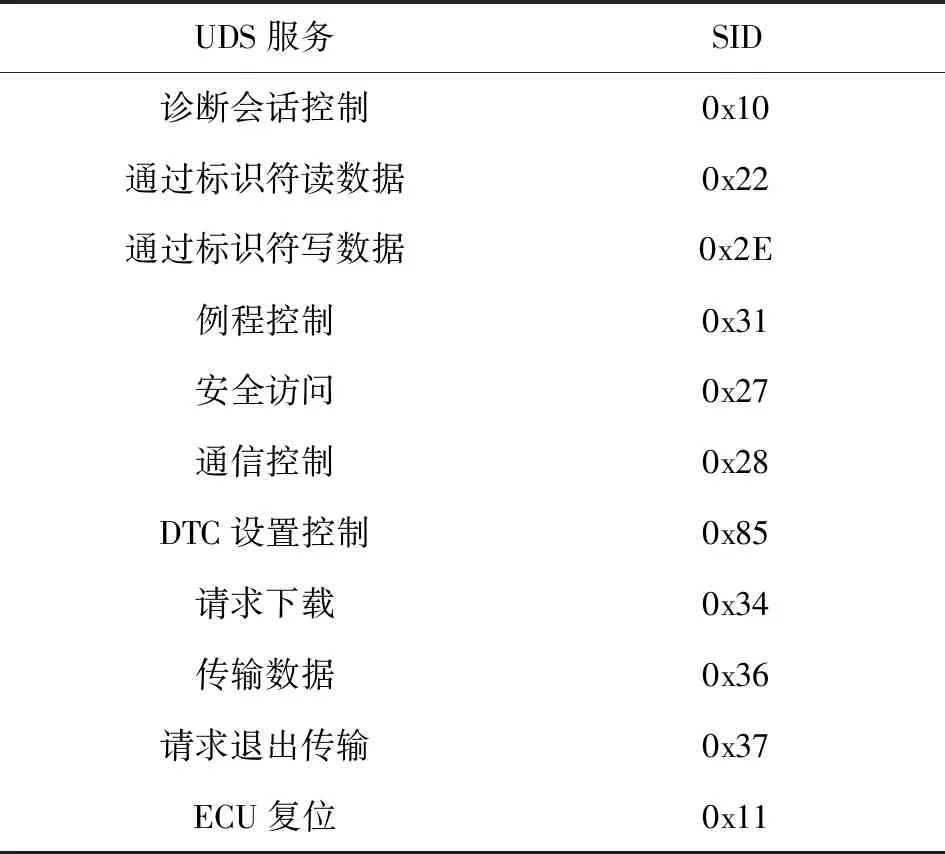
表1 UDS服务对应的SID
1.2 Bootloader应用CAN总线
CAN是基于开放式系统互联通信参考模型(OSI)设计的一种通信协议。CAN协议采用CRC检验和相应的错误处理功能,保证数据传输的可靠性。CAN的通信介质为双绞线、同轴电缆或光导纤维,速率可达1 MB/S,性价比极高。所以CAN总线是当前汽车领域广泛使用的一种通信方式,实现了整车电控单元之间的信息交互,以及电控单元和上位机之间的数据传输和命令交互。其中UDSonCAN在OSI模型中的分层结构见表2。
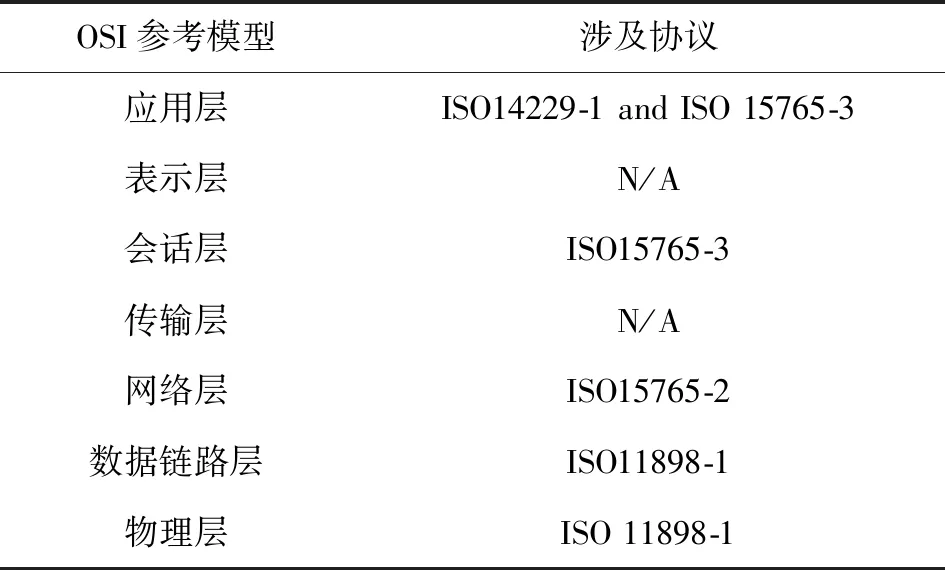
表2 UDSonCAN在OSI模型中的分层结构
1.3 Bootloader和APP框架设计
Bootloader是嵌入式系统在加电后执行的第一段代码,所以也称为引导程序,主要用于软件刷新。在一个成熟的嵌入式系统方案中,Bootloader和APP(应用层程序)是分开的,分别存放于不同的内存区域中。
此方案设计了多级Bootloader,如图1所示。上电之后默认进入Boot1,逐级跳转至APP,各级Bootloader和APP互不干扰。
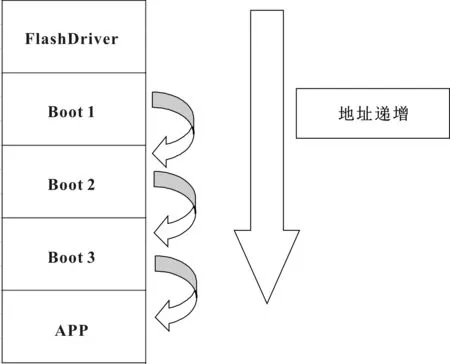
图1 多级Bootloader的设计
FlashDriver是一段具备擦除内存数据功能的程序,出于功能安全考虑,Bootloader中不能包含FlashDriver(刷新驱动),避免程序跑飞运行至FlashDriver中,对TCU程序造成不可逆的破坏。为了避免上述情况,FlashDriver一般存放于上位机中,在编程过程中才将FlashDriver下载至特定的内存区域中,通过Bootloader调用FlashDriver程序,实现内存擦除功能。
2 Bootloader的设计
2.1 预编程设计
在程序刷新之前,需要通知整车其他的电控单元TCU即将进行程序刷新,所以功能寻址需要进入扩展会话模式;利用UDS的28服务,通过功能寻址禁止其他节点的报文发送,使整个CAN总线处于安静的状态,降低总线的负载率,提高程序刷写速度;利用UDS的85服务,禁止整车其他电控单元的故障诊断,防止程序刷新过程中其他电控单元误触发故障码;利用UDS的22服务,读取当前TCU的特定信息(如标定数据版本、软件版本、硬件版本)保证软件版本的匹配性。预编程设计流程如图2所示。

图2 预编程设计流程
2.2 编程设计
在预编程结束之后,进入编程阶段。首先进入编程会话模式,然后通过安全访问。
由于FlashDriver是不存储于TCU内部中的,所以第一步是将FlashDriver下载至指定内存区域中。下载完毕利用UDS的31服务进行数据校验,校验无误之后通过Bootloader开始调用FlashDriver程序。
接下来是根据需求擦除特定的内存区域并传输新的数据。传输完毕利用UDS的31服务进行数据校验,校验无误TCU才保存至特定的内存区域中。编程设计流程如图3所示。

图3 编程设计流程
该方案可对各级Bootloader进行更新,在擦除Bootloader内存前会对最基础的Bootloader做备份,防止下载过程中出错导致最基础的Bootloader丢失。
2.3 后编程设计
在预编程和编程结束之后,功能寻址进入扩展会话模式,利用UDS中的28服务,恢复其他节点的报文发送;利用UDS中的85服务,恢复其他电控单元的故障诊断。
根据整车厂的刷新规范,还要利用UDS中的2E服务,写入一些特定的信息(如软件版本号、供应商号等),便于保持软件刷新的可追溯性。后编程设计流程如图4所示。

图4 后编程设计流程
3 Bootloader测试验证
为了验证此方案的可行性和可靠性,利用了INCA软件和ETAS582硬件工具进行测试。根据设计的刷新流程,编写INCA软件的Prof(INCA软件的刷新流程)文件,Prof界面如图5所示。通过Prof界面选择要刷新的区域,对整个Bootloader方案进行多次测试和验证,INCA刷新界面如图6所示。
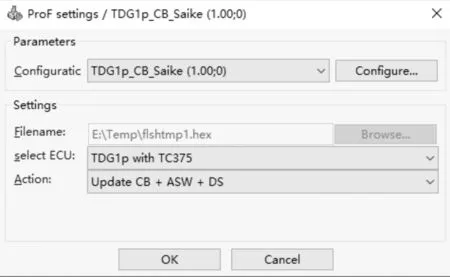
图5 Prof界面

图6 INCA刷新界面
测试结果表明,该方案能满足对TCU的程序刷新,并且整个过程方便、快速、稳定。即使人为操作导致刷新过程失败,也可以通过上位机界面或CAN总线数据中判断出失败的原因所在。
4 结论
基于UDSonCAN服务的Bootloader的设计,实现了只需要与TCU进行CAN总线连接,不需要对TCU硬件拆卸,就可以随时随地进行软件刷新。在前期的开发设计中,节约了开发人员的时间成本;在后期的功能升级中,提高了售后服务的工作效率。该方案在整个刷新过程中稳定、防错能力强、可靠性极高,并且严格遵循整车厂的诊断规范和刷新流程,可拓展于OTA软件升级流程中。
猜你喜欢
经营者(2024年1期)2024-03-19 02:02:34
当代陕西(2019年13期)2019-08-20 03:54:22
测控技术(2018年6期)2018-11-25 09:50:12
测控技术(2018年8期)2018-11-25 07:42:08
汽车维修与保养(2015年2期)2015-04-17 01:30:41
电子设计工程(2015年8期)2015-02-27 12:05:26
武夷学院学报(2014年5期)2014-07-19 10:08:27
河南科技(2014年16期)2014-02-27 14:13:22
河南科技(2014年11期)2014-02-27 14:09:54
测绘科学与工程(2014年5期)2014-02-27 07:06:14
