
并联式油电混合无人机的能量管理策略研究
2022-09-29 06:47:34陈宗科杨向宇
电源技术 2022年9期
陈宗科,杨向宇
(华南理工大学电力学院,广东广州 510630)
无人机是一种遥控或自动飞行的飞行器,它可以携带摄像头、传感器等其他设备,执行一些特定任务[1]。无人机已经广泛应用于军用和民用方面,并且有了巨大的经济效益。在无人机的开发中,无人机大小与载荷之间的权衡始终是一个问题,为了用更少的空间携带更大的载荷或飞行更长的时间,一方面通过集成化减少各种系统的质量和体积,另一方面致力于提高无人机能源的有效利用率[2]。
在锂电池技术有突破之前,传统无人直升机依然倾向于使用内燃机提供动力。但直升机飞行时仅能使用内燃机最大扭矩对应转速的很小一段工作区间,效率较低。而且随着环境问题越来越严重,人们也在寻求更有效的方案。混合动力系统就是其中的一种,混合动力系统将发动机和电机整合,通过能量的合理分配,充分利用两者的优点避开低效率区间。混合动力系统从结构上主要分为串联型、并联型和混联型[3]。串联型的特点是结构简单,发动机能始终工作在高效工作区,但能量转换次数较多影响效率,因此主要研究方向是燃料电池和太阳电池[4]。并联型的发动机与传动系统存在机械耦合,不能总工作在高效区;但能量可以直接利用,效率高体积小。混联型虽有各种优点,但结构复杂不适合用在小型无人机上。
早期的能量管理策略主要是基于规则的控制方法,后来出现了基于动态规划的方法、基于等效油耗率的方法,近年来最优控制算法、模糊控制算法、神经网络算法、遗产算法等先进智能算法也不断被研究[5]。无人机和汽车的混合动力系统有相似之处,在进行能量管理时可以借鉴,但也需要分析不同之处,针对无人机的特点进行改进。
1 油电混合动力系统设计
1.1 混合动力系统结构
本文采用的同轴并联型混合动力系统是并联型混合动力系统的一种,该系统的发动机和电动机通过同一根轴传递功率,单个电机在电动模式和发电模式切换,如图1 所示。这种系统结构简单、体积小、效率高,适合小型无人机;但因为两个动力源在同一根轴上,控制精确要求较高。
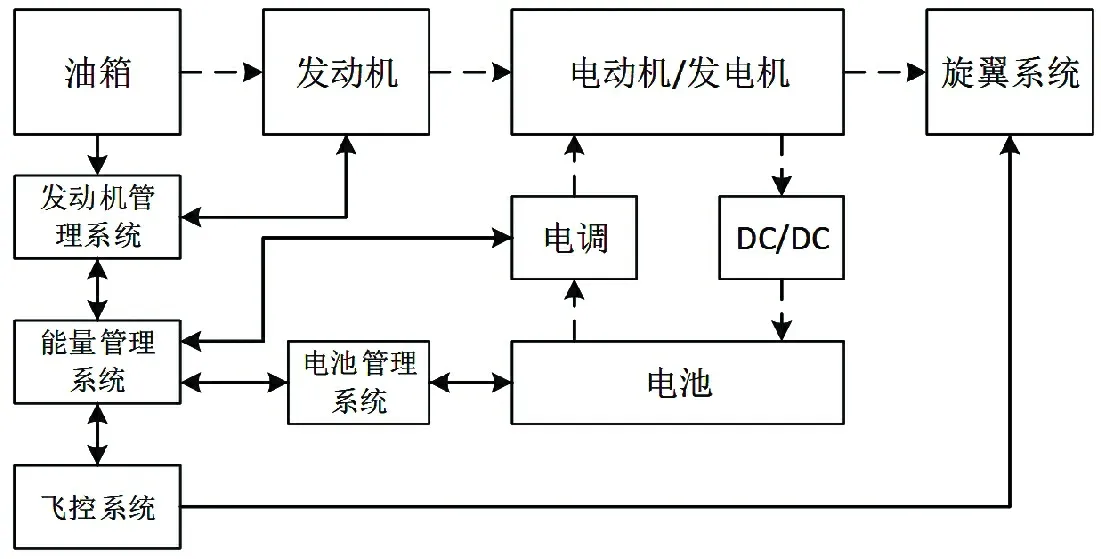
图1 混合动力系统结构
1.2 发动机模型
发动机是混合动力系统的主要动力源,起着承担基础负载的作用。本文利用发动机的万有特性图,用试验建模法建立发动机模型[6]。通过查阅发动机说明书和实际测试,得到发动机万有特性图(图2)。图2 中红线被称为理想工作曲线[7],是每个转速和扭矩组合对应的油耗率最低的工作点连接起来得到的曲线,理论上工作在理想工作曲线可以用尽可能少的燃油得到最好的性能。

图2 发动机万有特性图
经测试[8],发动机的转速和节气门开度可由传递函数表示为:

耗油量通过查表函数得到油耗率后经过积分获得:

式中:B为总耗油量;b为燃油消耗率;Peng为发动机功率;Teng为扭矩;n为转速。
1.3 电动机/发电机模型
电机是混合动力系统中的辅助动力源,主要作用是起到削峰填谷的作用,调节发动机的功率。
当电机工作在电动状态,电动机输出机械功率,电池放电电流为:

式中:U为锂电池端电压;Idis为锂电池放电电流;ηm为电动机效率和电调损耗等。
当电机工作在发电状态,发电机发出的电能经过电力电子变换器后给电池充电。若电池为恒流充电,则电池充电电流Ich保持不变(为常数),电池端电压U随电量变化,发电机消耗功率也随之变化。

式中:ηgen为发电效率;ηDC为转换效率;Pgen为发电机消耗机械功率。
1.4 电池模型
锂电池的工作过程是复杂的电化学过程,本文采用等效电路模型。内阻模型是最常用也最简单的一种模型,将锂电池等效为一个理想电压源UOC串联一个电阻Rin[9],如图3所示。
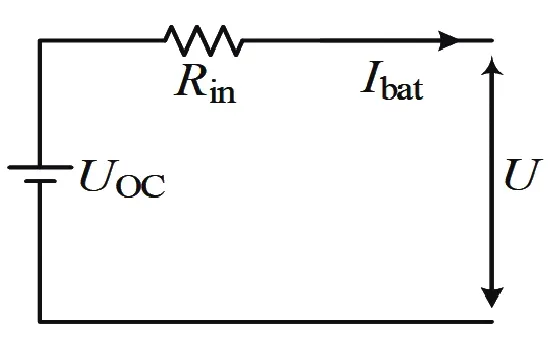
图3 锂电池的内阻模型等效电路
根据电路学知识可以得到锂电池输出端电压:

内阻模型的锂电池内阻Rin和开路电压UOC随荷电状态(state of charge,SOC)变化,如图4 所示,在仿真模型中通过查表获得。
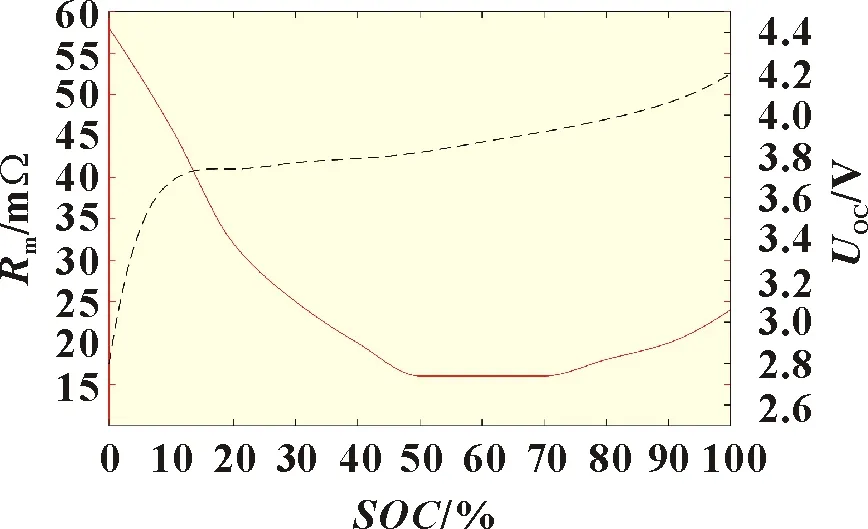
图4 锂电池内阻和开路电压与SOC的关系
SOC是描述电池状态的重要参数,它反映了电池的剩余容量。SOC计算主要有安时法与开路电压法[9]。安时法是通过对单位时间内流过电池组的电流进行积分,从而得出这段时间内SOC的变化量。当电池的初始荷电状态为SOC0,则t时刻的荷电状态为:

式中:Qmax为锂电池的最大电荷量。综合两种方法的优缺点,本文在无人机启动时利用开路电压法检测开路电压,获得初始值SOC0;电池正常工作时,利用安时法实时检测锂电池工作电流并计算SOC。
2 混合动力系统的能量管理系统与策略
2.1 功率平衡与能量管理系统
能量管理系统主要在维持功率平衡的原则下合理分配功率:

当发动机单独驱动时,无论电池是否充电,仅需对发动机进行恒转速控制,通过调节节气门开度即可自动完成功率平衡。

当发动机和电动机共同驱动时,能量管理系统会分配两者各自的输出功率。发动机的输出功率大致上由节气门开度决定,某转速下的功率和节气门开度具有线性正比关系。因此已知发动机分配功率时,可以查出对应节气门开度,然后控制其不变;剩余的功率和各种扰动均由电动机承担,通过控制电动机的转速恒定达到功率平衡。

2.2 无人机与汽车混合动力系统的差异
根据叶素理论和动量理论提出了一种直升机的功率计算[10],根据该方法计算得到的飞行任务各阶段需求功率分布如图5 所示。直升机飞行时的功率分为诱导功率、型阻功率和废阻功率,因为小型无人直升机旋翼转速非常快而体积和重量都小,发动机的输出大部分用来克服无人机的型阻功率,因此飞行时需求功率总在1 kW 以上。其中在爬升阶段需求功率最大,高速巡航阶段次之,悬停状态适中,中低速巡航阶段最小。
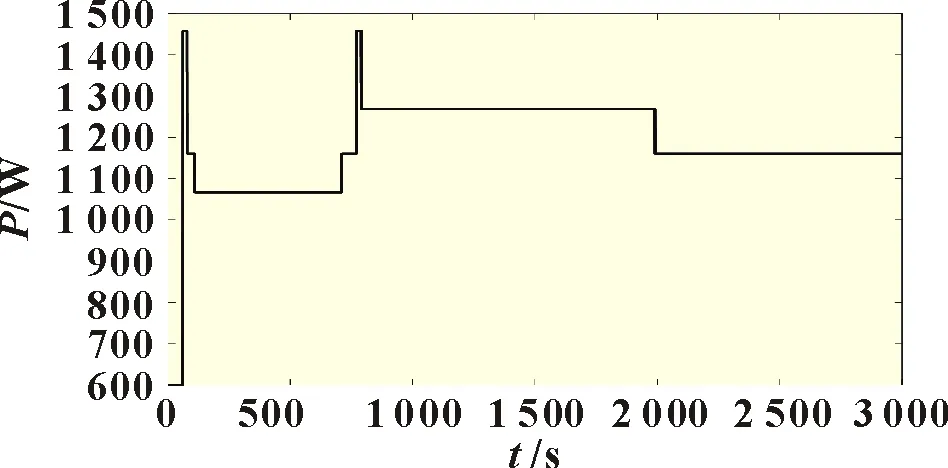
图5 飞行任务需求功率分布图
汽车的行驶速度根据路况不停变化,根据驾驶员的油门和刹车信号会频繁加减速、启停车等,因此发动机转速变化大且频繁,需求功率也不停变化。直升机在飞行时,为了保持稳定性,对发动机进行恒转速控制,发动机只在提前预设的转速工作。直升机中低速巡航时有最低需求功率,其他情况都是在此基础上需求更多功率,可以分为基础负载和额外负载。混合动力无人机的空间较小结构紧凑,发动机转速快扭矩小,因此没有离合器和变速器,且电动机作为辅助动力,功率和体积都比较小。因此汽车的混合动力系统可操作状态更多,可以工作在纯油动、纯电动和混动三种状态,也能通过换挡改善发动机工作点。
2.3 无人直升机能量管理策略
无人机能量管理策略的原则包括:(1)由发动机承担主要负载,剩下的负载由电池补足;(2)发动机尽量工作在理想工作曲线附近;(3)锂电池尽量保持在高效工作区间。
2.3.1 有限状态机
有限状态机是最普遍的控制策略之一,它简单、可靠地使用预先确定的条件(if-then)管理,使受控对象切换不同的状态;其特点是计算量少,从而支持在线实现,也是已经应用在汽车混合动力系统上的一项技术。根据上文提出的直升机工作特性,无人机的混合动力系统工作状态大概分为发动机单独驱动、混合驱动和电池充电。但必须考虑发动机的转速,因为发动机转速会影响旋翼转速,进而影响需求功率和飞行状态,又会反过来影响发动机的工作状态。
有限状态机流程如图6 所示。
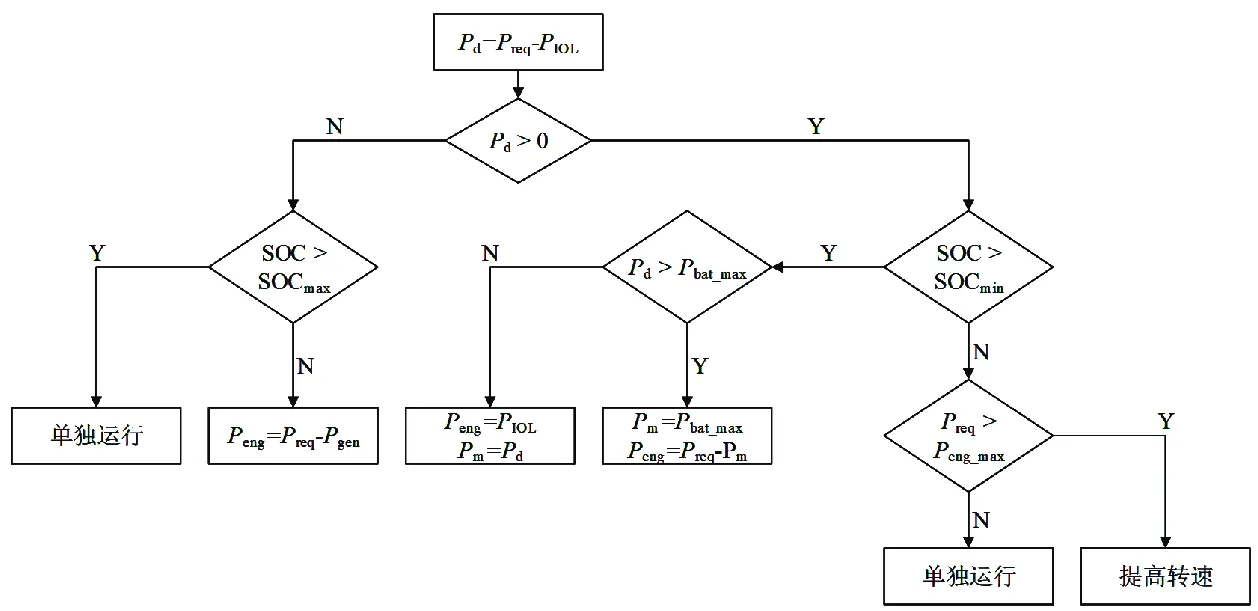
图6 有限状态机流程图
第一步:求解需求功率与理想工作点功率的差值Pd。
第二步:测算锂电池的SOC。
(1)若电池电量大于最小值,且需求功率大于理想功率,则发动机工作在理想工作点,锂电池补充其余功率。
(2)若电池电量大于最大值,且需求功率小于理想功率,则发动机单独运行,锂电池不可用。
(3)若电池电量小于最小值,且需求功率大于理想功率,则发动机单独运行,并给电池充电。若发动机功率小于发动机在该转速的最大功率,则转速不变;若发动机功率大于发动机在该转速的最大功率,则发动机应提高转速一个档位,同时传递信号给飞控系统改变旋翼,使直升机进入新的稳态。
(4)若无法充电,则电池既不能充电也不能放电,相当于没有使用混合动力系统。此时发动机必须提高转速到最大扭矩处,按未使用混合动力系统时的状态运行。
2.3.2 模糊控制
基于模糊逻辑的能量控制系统可以提高无人机混合动力系统的能量分配效率。随着模糊控制器的输入输出信号增加,模糊规则会越复杂,模糊控制的精度也会越高。但同时越复杂的规则会越难以制定,控制策略的实现难度会提高,控制系统的反应速度也会变慢。综合考虑系统的快速性和稳定性,经过反复尝试,最终确定了模糊控制系统的输入信号需求功率与理想工作点功率的比值Pd,电池的荷电状态SOC,功率误差信号Perror。输出信号是发动机功率Peng和电池功率变化量dPbat。
Matlab 的模糊控制工具箱提供了两种模糊推理类型,本文选择Mamdani 型。在模糊控制输入变量中Pd分为ZO、PS、PM、P0、PB 五个模糊子集;Perror分为NB、NM、NS、ZO、PS、PM、PB 七个模糊子集;SOC分为PS、PM、PB 三个模糊子集;输出变量中Peng分为ZO、PS、PM、P0、PB 五个模糊子集;dPbat分为NB、NM、NS、ZO、PS、PM、PB 七个模糊子集。隶属度函数以三角形隶属度函数、梯形隶属度函数为主,运算速度快。各个模糊子集范围及其隶属度函数如图7 所示。

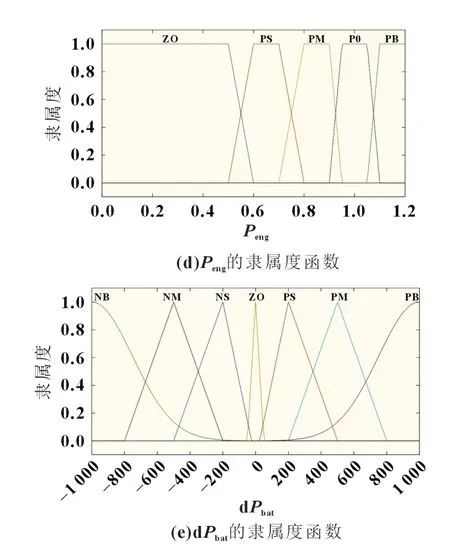
图7 模糊控制隶属度函数
模糊规则和有限状态机的原则基本相同,如表1 所示。
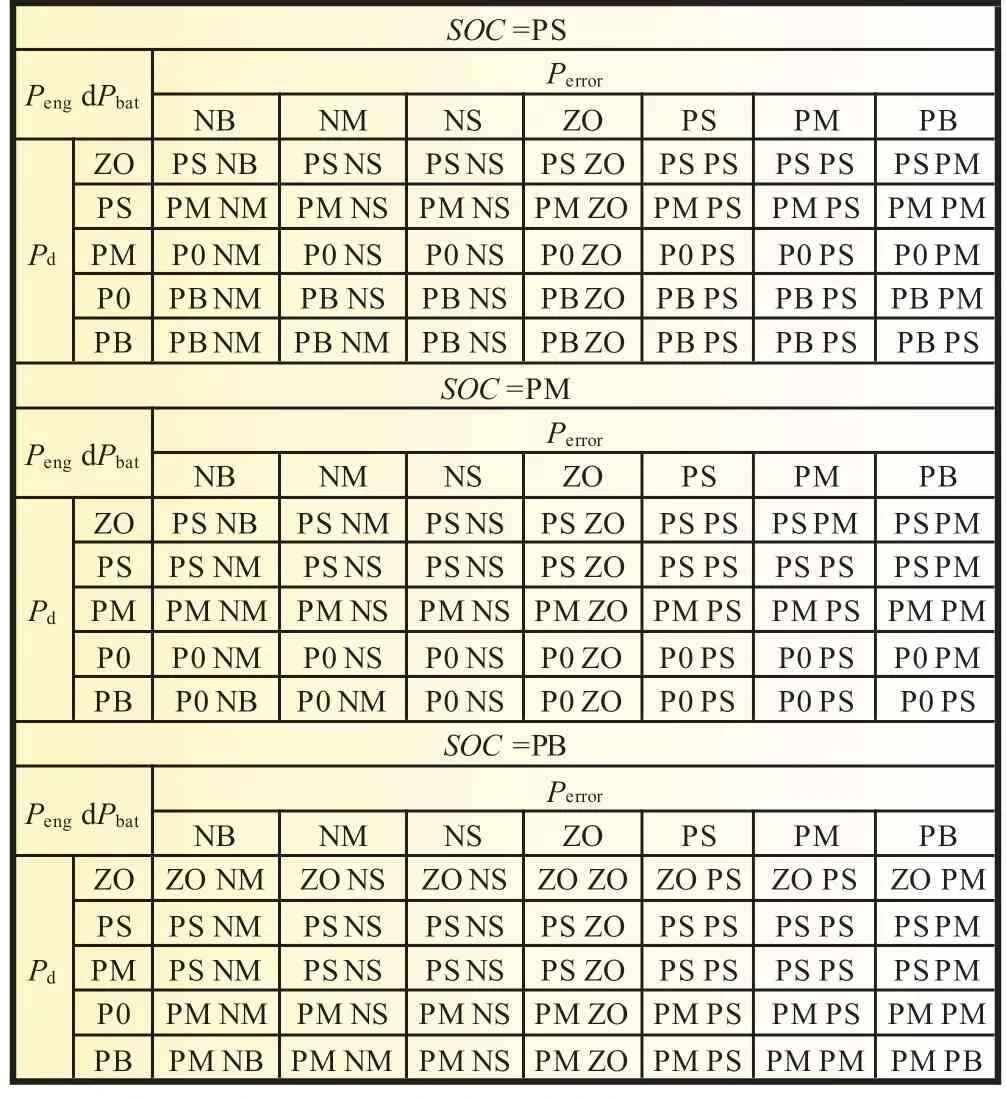
表1 模糊规则
3 仿真结果
不同策略下的发动机输出功率如图8 所示。发动机输出功率基本保持在理想工作曲线附近,只有当电池电量较低时才增大输出功率。不强制充电的有限状态机策略下,发动机功率变化量最大,这是因为发动机工作在9 500 r/min 附近,需求功率大大提高。强制充电的有限状态机策略下,锂电池电量较低时在8 500 r/min 附近充电一段时间。模糊控制策略下,发动机基本工作在理想工作曲线附近,锂电池电量下降时发动机功率变化也最小。将发动机的实际工作点在万有特性图中表示出来,如图9 所示,可以看出混合动力系统对发动机工作区间起到了明显的改善作用,主要工作点都集中在油耗率最低的区域附近。
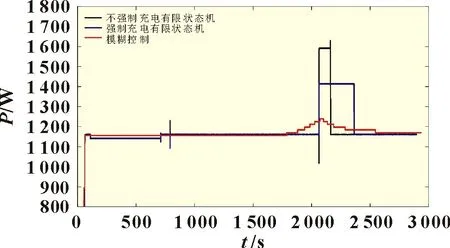
图8 发动机功率
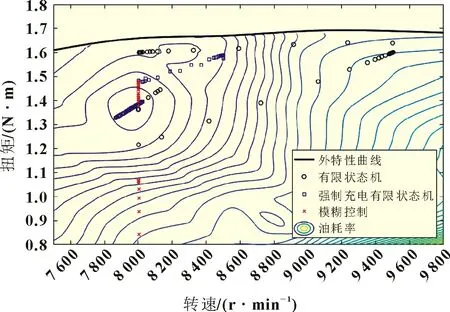
图9 发动机实际工作点
相比优化之前,续航时间从1 890 s 延长到了有限状态机的2 876 s 和模糊控制的1 933 s,分别延长了52.17% 和55.18%;锂电池始终工作在高效区间,不会影响安全运行。强制充电的有限状态机相比于不强制充电的有限状态机,续航时间有所减少但最终SOC更高,这是将化学能转化为电能储存了起来。使用模糊控制的混合动力系统会综合考虑发动机与电池的能量分配,提前采取措施使锂电池不会进入到低效区,锂电池的充放电次数与深度都最小,有利于延长锂电池的使用寿命。
4 结论
(1)根据无人直升机特性,给出了一种并联型油电混合动力系统的结构,并搭建仿真模型。
(2)比较汽车与直升机的工作状态,设计更适合无人直升机的能量管理系统,并制定有限状态机和模糊控制策略。
(3)以指定飞行任务为例,进行了仿真,表明能量管理策略能够根据飞行任务合理分配混合动力系统的功率,发动机的油耗率基本保持在较低区域,该混合动力无人机的飞行时长是纯油时的1.5 倍以上。模糊控制策略比有限状态机策略更加高效合理。
猜你喜欢
北京航空航天大学学报(2019年9期)2019-10-26 02:30:04
西南交通大学学报(2016年3期)2016-06-15 20:29:35
电子制作(2016年21期)2016-05-17 03:53:01
通信电源技术(2016年5期)2016-03-22 01:09:57
电源技术(2016年2期)2016-02-27 09:04:52
电源技术(2015年11期)2015-08-22 08:50:38
电源技术(2015年7期)2015-08-22 08:48:22
储能科学与技术(2014年5期)2014-02-27 07:16:12
储能科学与技术(2014年3期)2014-02-27 07:14:38
黑龙江科学(2011年2期)2011-03-14 00:39:36
