
卫星通信地球站与卫星相对参数计算方法
2022-09-27 06:26:54江会娟王冬冬
无线电通信技术 2022年5期
江会娟,王冬冬
(1.中国电子科技集团公司第五十四研究所,河北 石家庄 050081;2.通信网信息传输与分发技术重点实验室,河北 石家庄 050081)
0 引言
由于卫星通信具有覆盖范围广、不受地形环境限制、无远近效应等特点,能够为用户提供稳定的全球通信能力。经过半个多世纪的发展,卫星通信已经成为非常重要的通信手段之一。
通信卫星按照轨道划分包括静止轨道(GEO)卫星、低高度轨道(LEO)卫星、中高度轨道(MEO)等卫星。随着SpaceX公司星链计划的实施,全球低轨卫星(LEO)处于火热发展阶段。低轨卫星由于部署轨道低,与静止轨道卫星相比,具有低延时、低损耗的优点。但是低轨卫星运行速度快,与地球站之间产生较大的多普勒频移与时延变化,对地球站接收终端的同步产生严重影响。且地球站天线的指向范围大,天线的转动速度较快。为了保证通信的稳定性与可靠性,快速准确地预测多普勒频移的时变特性及地球站天线的指向变得非常重要。
文献[1]提出了一种适用于椭圆轨道与圆形轨道的多普勒频移快速计算方法,但需要提前预知卫星的可见时间以及地球站的最大可见仰角,对于时变性较强的LEO卫星,不易于工程应用。本文首先给出了根据卫星星历进行卫星轨道参数外推的计算步骤,然后给出了地球站接收终端同步需要的多普勒频移与时延,以及地球站天线指向方位角与俯仰角的计算方法,最后进行了仿真分析。该方法既适用于LEO卫星通信,也适用于MEO与GEO卫星通信。
1 卫星的轨道参数计算
1.1 计算方法与步骤
在惯性坐标系下描述卫星运动的状态方程为:
(1)


t0时刻的状态量X0可以根据卫星轨道六根数计算得到。
根据牛顿第二定律可得卫星的运动方程[2]:
(2)

卫星的运动方程描述了卫星的位置和速度随时间变化的关系。卫星的速度和位置可以根据开始历元卫星的速度和位置,对得到的卫星加速度进行积分得到。
在卫星的轨道参数计算中,因为单步积分法的累计误差较大,所以单步积分法通常用作多步积分法的起算数据。当采用单步积分法计算出足够的起算数据后,就可采用效率更高的多步积分法继续进行积分计算,从而得到卫星轨道参数外推数据。
1.2 由轨道根数计算卫星的位置与速度
卫星轨道六根数包括轨道的长半径a、轨道偏心率e、轨道倾角i、近地点角矩ω、平近点角M、升交点赤经Ω,同时在计算时参考历元t。则在t时刻卫星位置与速度矢量的计算步骤[3-6]为:
① 卫星运动的平均角速度为:
(3)
其中,地球引力常数μ=3.986 005×1014。
②t时刻的偏近点角:
E=M+esinE。
(4)
这是一个超越方程,可以通过迭代计算得到,也可以按照下面的公式近似计算得到:
(5)
③t时刻的真近点角:
(6)
④t时刻地心到卫星的距离:
(7)


(8)

(9)
其中:
(10)
1.3 RK单步积分
根据t时刻卫星的位置与速度矢量,采用四阶龙格库塔(Runge-Kutta)法[7-8]进行数值积分。积分公式为:
(11)
式中,Δt为积分步长,通过积分可以得到t+nΔt时刻卫星的位置与速度矢量。
1.4 Adams多步积分
多步积分法可采用四阶Adams方法[7,9]。其预估校正公式为:
(12)
2 地球站参数计算
2.1 多普勒频移与延时计算

(13)
式中,θ为格林尼治春分点时角。
θ=θgo+ωet,
(14)
式中,θgo为积秒t为0时的格林尼治春分点时角,ωe为地球固坐标系相对惯性坐标系的转动角速度,ωe= 15.041 07°/h。
地固坐标系下卫星的速度矢量:
(15)

(16)

卫星到地球站的指向矢量:
(17)
卫星与地球站的相对速度:
(18)
多普勒频移:
fd=-f0Vd/c,f0为传输信号载波频率,c为光速,归一化多普勒频移[11]:
fd0=-Vd/c。
2.2 天线指向计算
地球站天线指向计算的参考坐标系为地理坐标系(O-Xt、Yt、Zt),坐标原点O为地球站天线中心所在位置,三个坐标轴OXt、OYt、OZt分别垂直指向当地的东向、北向和天向,因而又称为东北天(ENU)坐标系[12-13]。
(19)
式中,φ、λ为地球站的纬度和经度。地球站天线方位角:
(20)
地球站天线俯仰角:
(21)
3 仿真结果
通过Matlab仿真,利用上文的卫星轨道参数计算方法对卫星的位置与速度进行了积分计算[14],并与STK 的高精度轨道预报器(HPOP)输出的卫星轨道参数进行了对比分析。
仿真中假定卫星的星历:轨道的长半径as=8 378.137 km;轨道偏心率es=0.001;轨道倾角i0=85°;近地点角矩ωs=0°;平近点角M0=290°;升交点赤经Ω0=150°。
卫星在轨运行时,作用在卫星上的摄动力包括地球非球形摄动、太阳光压摄动、大气阻力摄动、地球固体潮摄动、三体引力摄动等。在仿真中卫星受到的摄动加速度只考虑影响最大的地球非球形J2项摄动所引起的加速度[15-17]。
仿真时间长度为259 200 s(三天),时间间隔为10 s。通过Matlab仿真得到的卫星轨道参数与STK软件HPOP模型输出的数据在X、Y、Z三个方向的差值如图1所示。

(a) X轴方向
随着时间的推移,Matlab仿真输出数据的差值呈逐渐增大的趋势。X方向的差值最大为2.4 km,Y方向的差值最大为1.5 km,Z方向的差值最大为1.5 km。
分别利用Matlab仿真输出的数据与STK高精度轨道预报器(HPOP)输出的数据,对地球站天线的俯仰角与方位角进行计算与比较。在卫星的可见时间段内,地球站天线的俯仰角及其偏差值如图2所示。从图中可以看出,在3天以内,俯仰角的最大偏差为0.014°。

(a) 俯仰角
在卫星的可见时间段内,地球站天线的方位角及其偏差值如图3所示。从图中可以看出,在3天以内,俯仰角的最大偏差为0.026°。
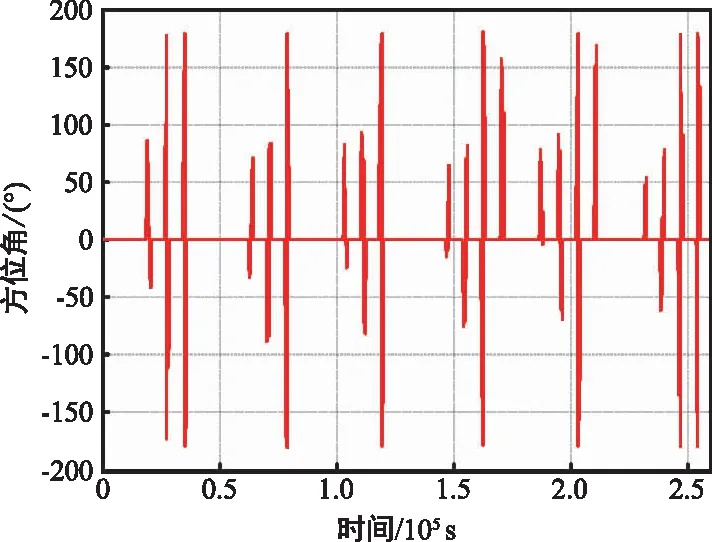
(a) 方位角
地球站到接收卫星发射信号的延时如图4所示,地球站与卫星间的归一化多普勒频移如图5所示。

图4 地球站接收信号延时
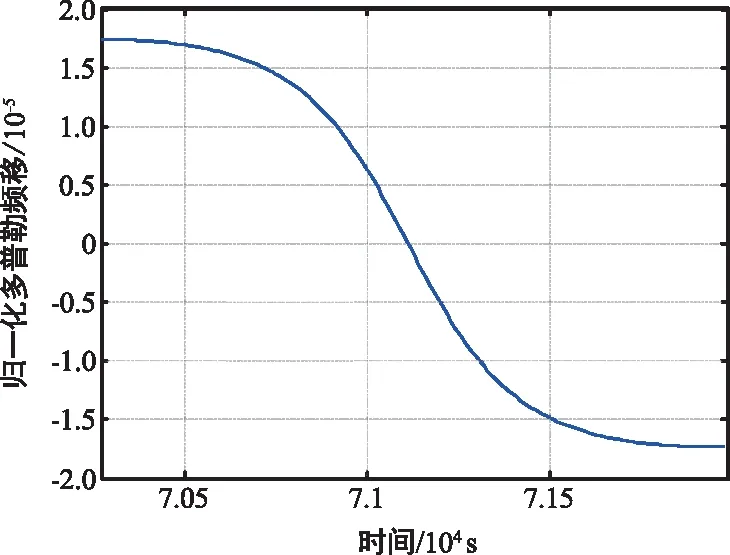
图5 地球站接收信号多普勒频移
从图中可以看出,地球站到信号传输延时数值为7~18 ms,最大归一化多普勒频移为1.7×10-5。如果载波频率为2 GHz,对应的最大多普勒频移为34 kHz。
4 结束语
根据惯性坐标系下卫星运动的状态方程,研究了基于初始时刻卫星的位置与速度,采用RK单步积分与Adams多步积分法,得到定步长卫星轨道数据外推的方法。根据该方法计算得到的卫星轨道数据与地球站的导航数据,通过内插计算及坐标系转换得到任意时刻卫星与地球站在地固坐标系下的位置矢量和速度矢量,地球站接收信号的多普勒频移、时延和地球站天线指向即可通过矢量计算得到。通过Matlab仿真,分别利用仿真得到的卫星轨道数据与STK软件HPOP模型输出的卫星轨道数据,对地球站参数进行了计算与比较分析,分析结果可以作为卫星地球站天线设计与接收终端载波同步与时延估计的理论参考。
猜你喜欢
中学生数理化(高中版.高考数学)(2021年6期)2021-07-28 06:19:00
传媒评论(2017年8期)2017-11-08 01:47:36
课程教育研究·新教师教学(2015年12期)2017-09-27 16:09:40
电子器件(2015年5期)2015-12-29 08:43:38
振动工程学报(2015年2期)2015-03-01 01:16:04
燕山大学学报(2014年4期)2014-03-11 15:28:50
机械与电子(2014年2期)2014-02-28 02:07:47
河南科技(2014年15期)2014-02-27 14:12:50
电子设计工程(2014年8期)2014-02-27 11:57:22
河北医科大学学报(2011年12期)2011-03-25 10:17:34
