
超声速火焰的3DLIF可视化技术研究
2022-09-26 08:40袁勋于欣彭江波秦飞刘冰曹振高龙韩明宏
实验流体力学 2022年4期
袁勋,于欣,彭江波, *,秦飞,刘冰,曹振,高龙,韩明宏
1. 哈尔滨工业大学 可调谐激光技术国家级重点实验室,哈尔滨 150001
2. 哈尔滨工业大学 光电子技术研究所,哈尔滨 150001
3. 西北工业大学 燃烧、热结构与内流场重点实验室,西安 710072
0 引 言
作为高超声速飞行器的动力推进系统,超燃冲压发动机是高超声速飞行器最为关键的部件,是航空航天技术领域的战略制高点。超声速燃烧机理的深度研究与超燃冲压发动机结构的优化设计,需要发动机燃烧诊断技术为其提供大量的三维数据支撑。在发动机燃烧诊断技术中,目前应用较为广泛的平面激光诱导荧光技术(Planar Laser–Induced Fluorescence,PLIF)具有非侵入、高时空分辨率等优势,但其作为平面可视化技术并不能完整反映火焰的三维空间结构,需要新的测量技术来实现立体测量。
三维激光诱导荧光(Three Dimensional Laser–Induced Fluorescence,3DLIF)技术是在激光诱导荧光(LIF)技术基础上发展起来的三维测量技术。3DLIF技术发展于20世纪90年代,由于激光和探测技术的限制,直到21世纪才逐渐开始完善。目前3DLIF技术有2种:多平面3DLIF技术和体光束照明3DLIF技术。多平面3DLIF技术基于PLIF技术,通过采集待测场不同位置的PLIF图像进行三维重构实现空间测量,属于近似瞬态测量。实现多平面的方式有扫描式和多重曝光式:扫描式可通过扫描振镜、旋转股和旋转扫描器等实现片光源扫描,其中,扫描振镜方案具有简单、高频的优点,逐渐成为应用最多的方式;多重曝光式是 Kristensson等基于多重曝光频率识别算法(FRAME)提出的一种全新的多平面技术,但由于系统庞大、能量损耗大、调试精度要求高等缺点仍停留在实验验证层面。体光束照明3DLIF技术又称为VLIF技术,它将点光源整形为体光束用于激发待测场,然后采用多台高速相机在不同角度进行图像采集,再利用层析算法实现空间可视化,该方法属于瞬态三维测量。
超燃冲压发动机试验台架的结构特性(比如大尺寸成像、光学窗口面积有限和设备空间受限等)对光学诊断技术要求很高,其燃烧空间结构可视化还面临一些技术难题。体光束照明3DLIF技术需要将点光源整形为大尺寸体光束,对激光器能量要求很高,技术难度较大;光学窗口面积有限导致多视角采集实现困难大,且多相机成本很高,测量系统非常复杂。扫描式多平面3DLIF技术基于现有的高频PLIF发动机台架试验技术加入片光扫描设备,实现了发动机试验台架燃烧空间结构可视化,但受高频扫描技术和相机景深范围的限制,扫描范围一般在10 mm左右,无法满足超声速火焰大尺寸成像的要求。因此,目前3DLIF技术多用于小尺寸待测场成像,关于超燃冲压发动机这种大尺寸、高速度成像的研究还未有报道。
针对超声速火焰燃烧诊断的需求和高频扫描技术的限制,本文在高频PLIF成像系统的基础上,设计搭建了基于扫描振镜的多平面3DLIF成像系统,并在超声速同轴射流燃烧试验装置上进行了验证实验,实现了超声速射流火焰的OH–3DLIF空间结构可视化。针对超声速火焰大尺寸成像的需求和扫描振镜扫描范围的限制,本文提出了一种扩大片光扫描范围的片光整形方案,可实现20 mm的高频扫描。通过实验,本文还分析了多平面3DLIF技术用于超燃冲压发动机燃烧诊断的可行性,并讨论了不同喷口火焰速度对火焰形状结构的影响。
1 实验装置与方法
多平面3DLIF技术实现过程包括2部分:多平面PLIF图像采集和图像三维重构。本文采用扫描振镜实现多平面PLIF图像采集:以扫描振镜将激光反射至片光整形系统中,通过控制器控制扫描振镜按照一定频率和幅值进行偏转,进而改变激光入射在片光整形系统的位置,最终实现出射片状激光束在一定范围内往返扫描,一次扫描过程采集的图像帧数由激光重复频率和扫描振镜频率共同决定。图像三维重构则是在实现多平面PLIF图像采集后,将一次扫描过程采集的图像进行插值处理,进而获得三维图像。本文基于上述过程设计搭建了三维激光诱导荧光成像系统,并对采用插值算法实现三维重构进行了简要介绍。
1.1 三维激光诱导荧光成像系统
三维激光诱导荧光成像系统是在高频PLIF系统的基础上设计而成,如图1所示。该系统由激光系统、片光扫描与整形系统、片光能量分布监控、图像采集系统、燃烧器以及数字延时器等组成。激光系统由1000 Hz脉冲Nd:YAG激光器和染料激光器组成,染料激光器采用罗丹明590,泵浦光经染料激光器调谐后再进行倍频,最后以1000 Hz的重复频率输出激光脉冲(单脉冲能量1.5 mJ)。为了降低荧光信号的温度依赖性,选用波长为283.553 nm的激光用以激发OH基跃迁。采用扫描振镜进行片光扫描,可实现激光规律偏转。片光整形系统的作用主要是将圆形光束整形为片状激光束。在实验中,引出一部分激光照射罗丹明乙醇溶液,监控片光能量纵向分布,用以图像校正。图像采集系统采用CMOS高速相机(Mikrotron EoSens 4cxp)搭配紫外镜头(Ocean)采集OH基荧光信号,分辨率为1856像素×970像素,视场大小为113 mm×53 mm,采用UG11和WG305滤光片阻挡散射信号。燃烧器为超声速同轴射流燃烧试验装置。DG645数字延时器可实现激光系统、扫描振镜和图像采集系统之间的时序控制。

图 1 三维激光诱导荧光成像系统Fig. 1 3DLIF imaging system
1.2 扫描振镜与片光整形方案
成像系统的扫描振镜与片光整形方案如图2所示。
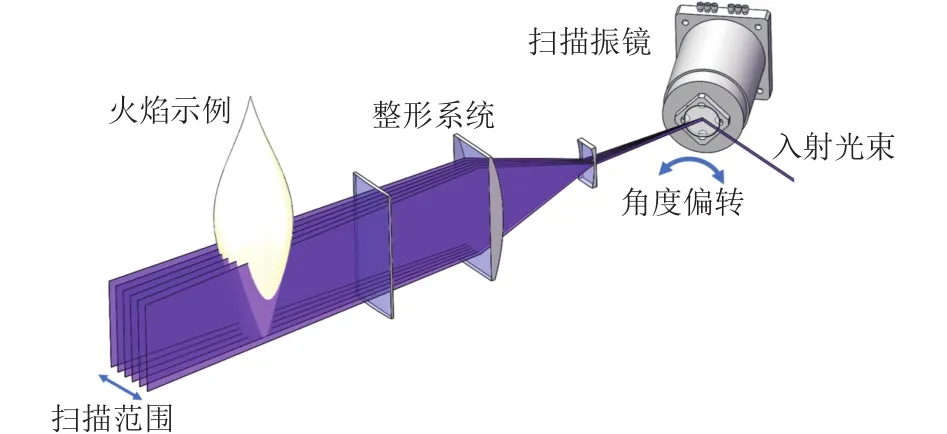
图 2 扫描振镜与片光整形方案Fig. 2 Scanning galvanometer and laser sheet shaping scheme
1.2.1 扫描振镜
实验采用的扫描振镜最大偏转角为2.5×10rad,空载响应频率为2000 Hz。控制器对扫描振镜输入正弦波形电压信号,压电陶瓷位移轴长度会因压电效应产生有序变化,进而带动扫描振镜倾斜面的角度偏转。倾斜面上固定反射镜,将激光束反射至整形系统的不同位置,整形完成后即可实现火焰多平面激发。
为保证扫描精度,需要进行时序控制来保证每次扫描过程各个片光位置的一致。若将扫描振镜与激光系统进行同步时序控制,会提高时间分辨率,但空间分辨率会下降一半。为了简化实验系统,本文将激光脉冲频率和扫描振镜频率控制在整数倍,以保证每个扫描周期内各片光位置保持不变。激光频率为1000 Hz,基于重构精度的需要,将扫描振镜的频率设为100 Hz,一个扫描周期内即可采集6帧图像进行重构,重构频率为200 Hz。
1.2.2 片光整形系统
在常规的片光整形方案中,为了保证各片光之间平行,扫描振镜应位于聚焦透镜的焦点处,则片光扫描范围L可表示为:

式中,f为焦距,为扫描振镜的最大摆角。由式(1)可知,要实现大范围扫描,就需增大摆角与焦距。由于国产压电陶瓷倾斜台性能的限制,在高频工作条件下,扫描振镜难以实现大范围摆动;而聚焦透镜焦距过大则会使片光变厚,导致空间分辨率变差。由此可见,扫描范围与片光厚度相互制约,在常规配置下片光扫描范围无法满足超声速火焰的大尺寸成像。
为扩大扫描范围并控制片光厚度,本文针对燃烧装置的尺寸改进了片光整形系统,提出了一套扩大扫描范围的片光整形方案,该方案的光学系统如图3所示。该系统包括4个透镜,分别是透镜1(平凸柱透镜,焦距540 mm)、透镜2(球面凹透镜,焦距25 mm)、透镜3(平凸柱透镜,焦距220 mm)和透镜4(平凸柱透镜,焦距350 mm),将透镜1和2进行虚焦点共焦放置,透镜2、3和4共焦放置。透镜2和3用于光束纵向扩束并准直为平行光,透镜1、2和4用于光束扩展并聚焦为片光。由该方案整形后的片光宽度为85 mm,厚度约为0.6 mm,扫描范围可达20 mm,在该厚度下获得的PLIF图像信噪比仍保持在较好的水平。

图 3 片光整形方案(俯视图)Fig. 3 Laser sheet shaping scheme(top view)
经计算,在该扫描范围下,实际成像范围已超出相机景深范围,这会导致景深外的图像模糊,但火焰基本的形状和涡结构仍可以获取,且火焰边缘图像面积较小,对通过重构获得火焰三维平均图像产生的影响可以忽略。因此,该片光整形方案可在大幅扩大扫描范围、控制片光厚度的基础上将图像清晰度控制在可接受的范围内。为进一步提高图像清晰度和重构精度,可采用双相机模式进行图像采集。
在三维重构时应确定每一帧图像对应的实际空间位置,由于片光并不是等间距的,需要对片光位置进行标定。本文采用标定卡像素换算方法进行标定:将带有刻度的标定卡置于燃烧器喷嘴中轴位置,刻度面与镜头面呈45°放置,拍摄对焦图像;然后打开激光器与扫描振镜,拍摄片光激发标定卡的荧光图像;最后通过像素位置关系换算出一个扫描周期内所有片光的实际空间位置。
1.3 图像三维重构
PLIF技术同一时间只能对一个火焰截面进行成像,要实现空间结构可视化,需要对一次扫描过程中的未激发区域(位于获得的图像之间)进行插值处理,进而采用不同位置的二维图像重构出一定时间间隔内的平均三维图像。常用的插值算法有线性插值、多项式插值、三次样条插值以及双三次插值等,考虑到精度和计算速度的要求,本文采用多项式插值。多平面三维重构的流程如图4所示,其实现过程为:1)多平面PLIF图像的采集。使用高速相机采集多平面PLIF图像并对图像格式进行初步转换。2)图像预处理。对多平面PLIF图像进行裁剪、图像去噪、灰度值归一化和能量分布校正等操作。3)插值算法处理。将每帧多平面PLIF图像放入对应位置并对空缺位置进行插值。4)火焰图像三维重构。根据所有火焰的多平面PLIF图像进行合成,得到整个火焰区域的3DLIF伪彩色图像。
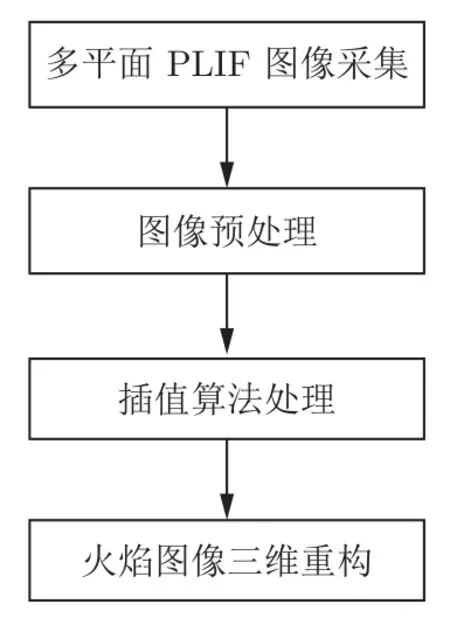
图 4 三维重构流程图Fig. 4 3D reconstruction flow chart
1.4 超声速射流火焰
本文采用超声速射流火焰(由超声速同轴射流燃烧试验装置产生)进行实验验证,如图5所示。试验装置外环为低速伴流燃料的通路,伴流燃料由乙烯与空气预混而成,从燃烧器底部通入,经过5块多孔板的扰动进行充分的混合,最后预混气在燃烧器顶部的多孔蜂窝板处点火形成伴流火焰。中心管道为高速主流燃料通路,主流燃料为乙烯,由管道顶端口径为1 mm的空心圆锥形喷嘴喷出,经伴流火焰引燃形成高速射流火焰。通过调节主流燃料通路上的压力阀改变主流的喷注压力(总压)进而改变火焰速度,喷口火焰速度最快可达Ma=1.8。
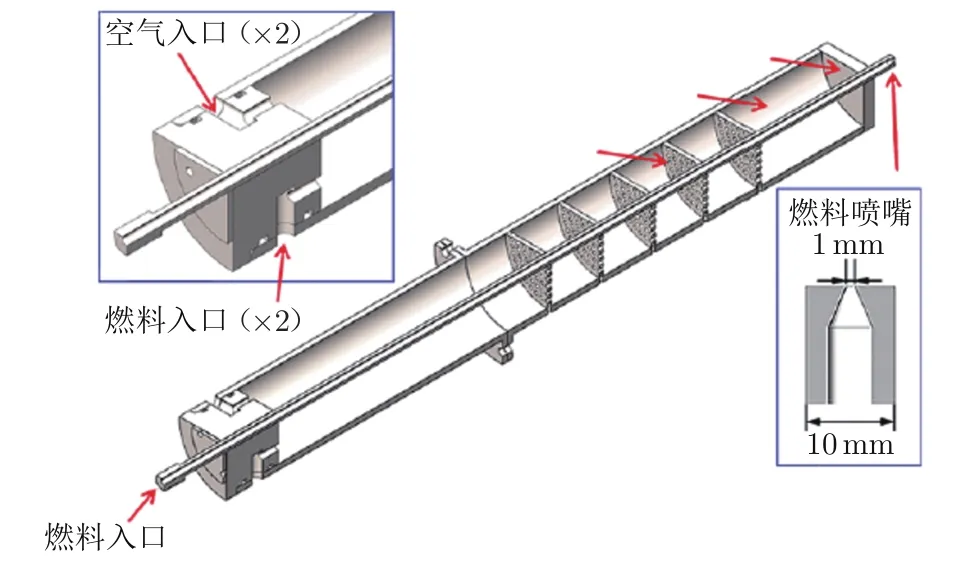
图 5 超声速同轴射流燃烧试验装置Fig. 5 Schematic diagram of supersonic coaxial jet combustion
2 实验结果与讨论
2.1 火焰三维重构示例
根据上文实验方案设计搭建3DLIF实验装置,乙烯流量为4.6 L/min,空气流量为114.0 L/min,主流压力为303975 Pa,喷口火焰速度为Ma=1.4。为便于观测火焰中心位置OH基空间分布,片光扫描未完全沿燃烧器中轴对称分布,而是向一侧偏移。图6为经过片光位置标定获得的一次扫描过程各个片光的位置,其中紫色线代表片光,对应数字为一次扫描过程的扫描顺序。采集每个位置的OH–PLIF图像,通过图像去噪、能量分布校正和转伪彩等图像处理操作,获得了如图7所示的一次扫描过程OH–PLIF图像。
对图7的6帧图像进行三维重构,获得了如图8所示的超声速火焰三维图像。图像对应实际空间大小为50 mm(长)×85 mm(宽)×20 mm(厚),频率为200 Hz,时间尺度为5 ms。由于火焰速度为超声速,在该时间尺度内相邻PLIF图像之间相关性较差,因此该三维图像提供的是短时间内的火焰结构与形状的平均。从图中可以看出:火焰形状为中心空洞的圆锥形(由于扫描范围的限制无法完全重构出完整圆锥形),中心几乎无OH基存在,侧边锋面存在大量褶皱,还原了超声速射流火焰的形状与结构特征;根部有一部分区域未完全包合且出现小范围截断,与实际火焰并不相符,原因是喷口处片光与相邻片光间隔相对较大,且只有喷口处PLIF图像包含根部信号,因此在进行三维重构时无法沿火焰锋面轮廓进行插值,导致火焰根部无法完全包合。在后续研究中可采用多种算法进行对比分析,优化重构效果。
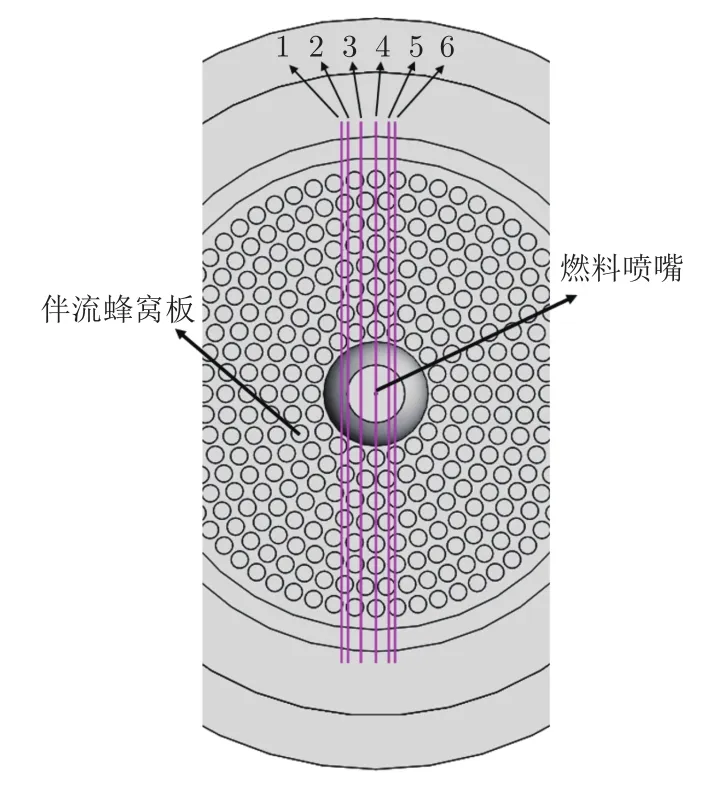
图 6 片光位置Fig. 6 The location of laser sheet
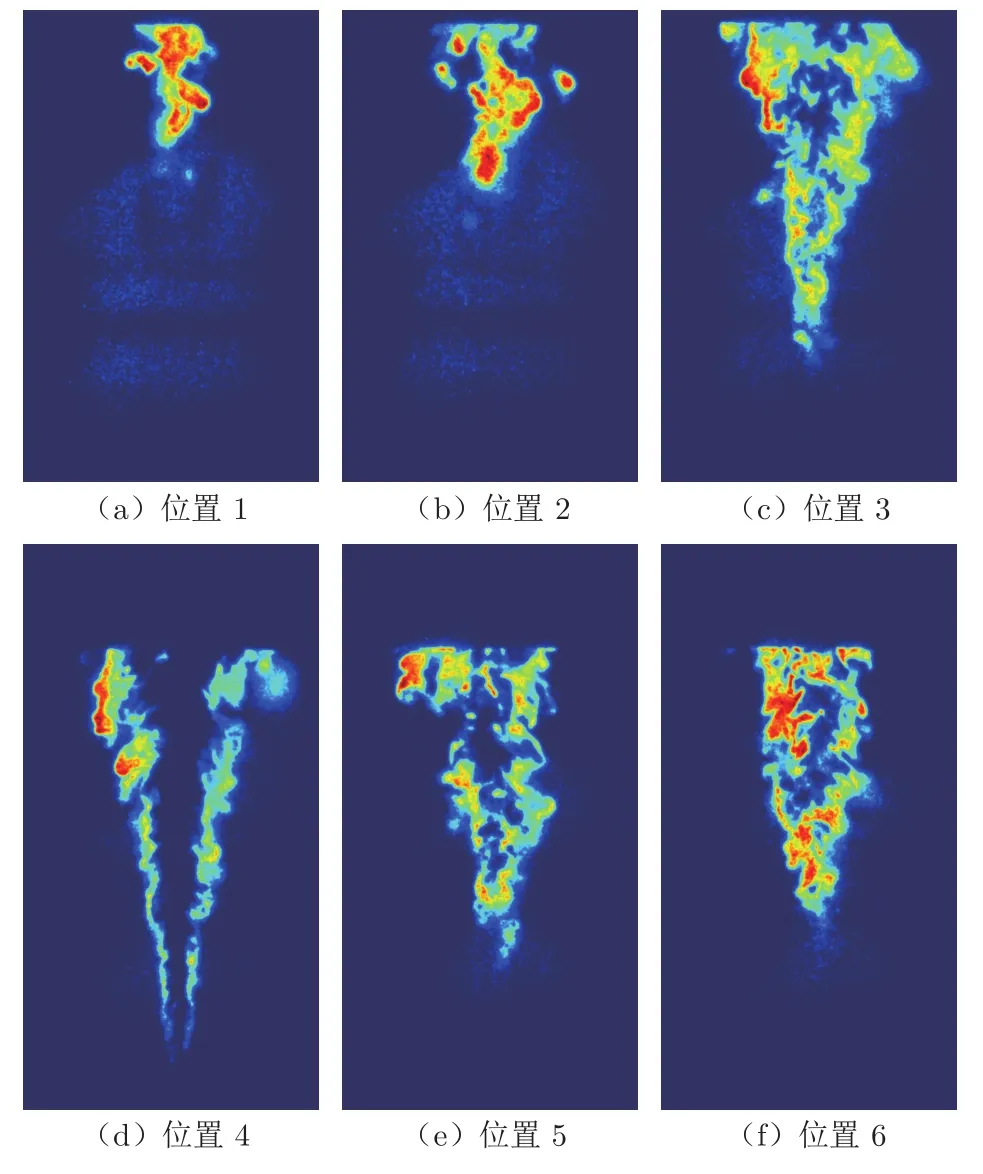
图 7 一次扫描过程各位置的OH-PLIF图像Fig. 7 OH-PLIF images of one scanning process
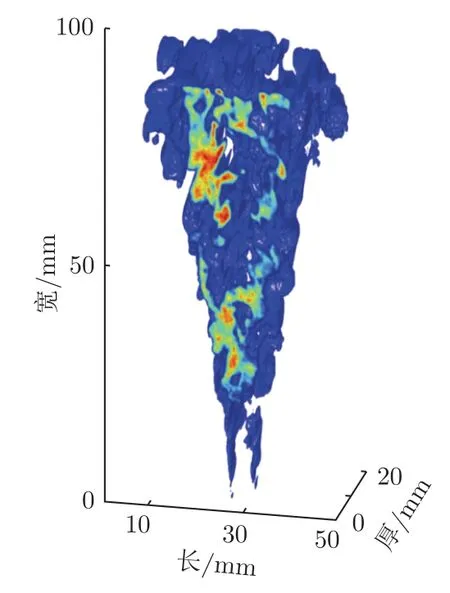
图 8 火焰三维图像Fig. 8 3D image of flame
上述结果表明,多平面3DLIF技术可用于超声速火焰的三维测量。为了分析该技术应用于超燃冲压发动机试验台架实现燃烧空间结构可视化的可行性,与美国国家航空航天局兰利研究中心的10 Hz多平面PLIF实验进行了对比。多平面PLIF实验在直连式超燃冲压发动机燃烧室上进行,通过改变片光入射位置来采集同一工况不同位置的PLIF图像,然后将这些图像进行空间位置排序,以实现燃烧空间结构的可视化。该多平面的实现方式属于多次平均式,最后获得的是同一工况不同实验车次火焰结构的平均。本文作者所在团队先前在超燃冲压发动机试验台架上进行过相似实验,区别在于改变的是垂直于来流方向的片光位置,在不同车次下火焰相关性很差,通过插值重构获得的三维图像并不具有实际意义,需要同一车次的火焰平均。本文采用振镜快速扫描方式实现了短时间(5 ms)内的火焰结构与形状的平均,该方式得到的结果更加接近于火焰的真实结构,且能够大大降低实验的时间成本。本文自主研制的高频PLIF系统的片光整形系统为自由调节一体式,只需将扫描振镜与片光整形方案进行调整即可通过3DLIF技术进行三维测量,且扫描范围满足超声速火焰大尺寸成像的需求,因此后续可应用于超燃冲压发动机试验台架上进行3DLIF实验研究。
2.2 喷口火焰速度对火焰形状的影响
为获得不同喷口火焰速度对火焰形状的影响,在表1所示的工况下重构出了不同主流压力和火焰速度条件下稳燃过程的时均3DLIF图像,如图9所示。从图中可以看出,随着主流压力增大、火焰速度加快,火焰体积逐渐变小,形状更加瘦削,整体呈现向中心收缩的趋势。这是由于流场速度变大以后,燃料被吹得更高,主要燃烧位置被抬高,火焰根部就会收窄。在主流压力为101325 Pa、火焰速度为亚声速(Ma=0.8)条件下,火焰结构十分饱满,形状比较规则,而随着火焰的速度加快,OH基信号逐渐变弱,涡结构变多,火焰整体结构更加破碎,火焰稳定性变差。
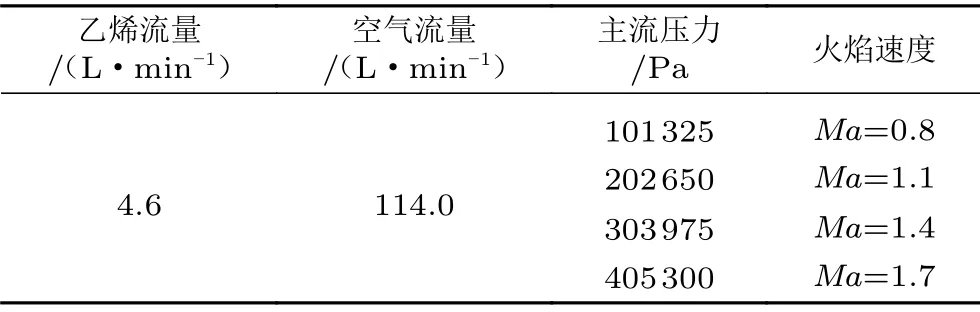
表 1 工况表Table 1 Working condition

图 9 不同火焰速度的空间结构图Fig. 9 Spatial structure diagrams of different flame speed
3 结 论
为满足超燃冲压发动机燃烧诊断的需求,本文开展了基于扫描振镜的多平面3DLIF可视化技术研究,获得了结论如下:
1)设计了基于扫描振镜的多平面3DLIF成像系统,实现了超声速射流火焰多平面3DLIF空间结构可视化。
2)提出了一种扩大扫描范围的片光整形方案,可实现50 mm×85 mm×20 mm大尺寸成像。
3)通过调节主流压力来改变火焰速度,讨论了火焰速度对火焰形状的影响。分析结果表明,随着火焰速度的增大,火焰体积变小,形状更加瘦削,且涡结构增多。
4)采用多平面3DLIF技术实现了超声速燃烧场的三维测量,该技术可应用于超燃冲压发动机试验台架的燃烧空间结构可视化。
由于超声速火焰高速度、高精度成像的需求,目前激光器和扫描振镜的频率还无法达到近似瞬态测量,基于目前的设备水平,本文作者所在团队拟将扫描频率提高至1 kHz,则火焰的最小时间尺度可提升为500 μs,对于超声速火焰,在该时间尺度下可视为近似瞬态测量,可以获取火焰结构的产生与变化过程。除此之外,为了提高三维图像的精度与准确度,还需进一步优化三维重构算法。
