基于BIM的校园道路交通风险因素识别及设计优化
2022-09-23 04:46周桥远杨冰凤刘丹虹刘健豪
四川建筑 2022年4期
周桥远, 杨冰凤, 刘丹虹, 刘健豪, 杨 旭, 蒋 杰
(西南石油大学土木工程与测绘学院,四川成都 610500)
[通信作者]蒋杰(1982—),男,硕士,讲师,研究方向为项目管理、BIM技术应用等。
现在的城市道路规划设计已经非常成熟,但是像校园这样的封闭区域里的道路设计,往往只考虑基本的设计标准,却不能综合考虑路边的景观、构筑物和车位停车等因素可能造成的视线遮挡,尤其校园道路其转弯半径往往较小,即使在满足限速30 km/h的前提下,也容易存在着各种交通安全隐患。
BIM技术的可视化效果提供了对校园区域内道路进行设计前优化的可能性,可以找出由于路边景观遮挡、路口设置不合理、停车位设置等问题导致的校园内道路驾驶时的不安全因素,模拟在不同情况下校园道路中车辆行驶出现的问题,根据各种风险因素在校园道路规划就时做到最优化,建设最优的道路,大大地降低校园道路交通事故的发生。
1 BIM技术在道路规划与建设中的应用现状
BIM技术建立的三维可视化模型,可以将建筑以三维效果展现在大家面前,还可以模拟不能在真实世界中进行操作的事物,通过BIM技术进行道路规划与安全优化,需要利用BIM技术具有的自动计算功能与辅助分析功能使二维设计文件和BIM数据之间实现互联互通,并提出一套以BIM技术为基础的道路工程行车安全设计及综合评价方法,以此提高设计工作效率与道路交通的安全性[1],对此,国内外都有所研究。
国外,西班牙瓦伦西亚政治大学设计与制造研究所利用非侵入性设备(例如摄像机和LIDAR)收集实际操作建立一个驾驶模拟器,将驾驶模拟器运用到用BIM技术建立好的3D道路模型中去,进行了两条道路在3D模型上的驾驶模拟[2],可以清楚直观地看到在车辆行驶中这些道路所存在的危险因素;国内,建立基于真实环境创建真实的三维模型,还有周围建筑物道路隔离带、建筑、景观、河流等其他基础设施模型,并且可以分析区域用途,设计师直接在三维模型上进行规划设计城市道路[3],并且可以在同一模型中创建多种路线规划设计方案,设计完成后通过三维模拟道路真实情况,进行再次优化。
由此可见,BIM技术运用在道路规划与建设中是有可行性的。
2 研究思路
项目组拟针对所在高校的校园内道路建立完整的BIM模型,对路口的视线遮挡情况进行定量分析,识别出可能影响交通安全的风险因素,针对不同的遮挡程度对应的风险发生概率,对路口进行分类,再针对不同类型的路口提出有效的优化方案,最后在三维模型中将优化方案付诸实现并评估优化效果,从而证实这一手段对于路口规划设计的有效性。
3 校园道路交通风险因素识别及设计优化过程
3.1 风险调查与识别
项目组对所在高校内的校园道路交通状况开展了问卷调查,并按照问卷调查的结果对20个路口进行了实地调研,筛选出来存在较为明显的交通风险的几个典型路口,详见表1。
3.2 利用Revit软件进行道路交通风险评估
运用Revit软件建立场地模型,一比一还原校园道路,对工程道路的实际行车情况进行模拟,包括模拟道路两侧的树木、停车位、标志牌及部分其他标志性参照物,实地观察测量树木覆盖和其他物体导致的视线遮挡范围及道路转弯处的盲区角度,结合Revit漫游模拟的驾驶员视角角度进行分析,综合各项数据计算出路口的视线盲区范围及驾驶员的盲区角度,对安全刹车距离与汽车所形成的视野三角形内的视线遮挡进行判别(图1)。
3.2.1 计算安全刹车距离
根据公式S=V2/(2gμ)计算安全刹车距离,考虑人的反应时间和车子的响应时间,正常情况下所需总时间约0.5~0.6 s,大多数人的动作时间约需1 s。式中:V为车速m/s;g为9.8 m/s2假设摩擦系数μ为0.8,则不同的车速,刹车距离计算结果见表2。

表1 典型路口及风险识别

表2 车速与刹车距离数据

图1 校园道路模拟
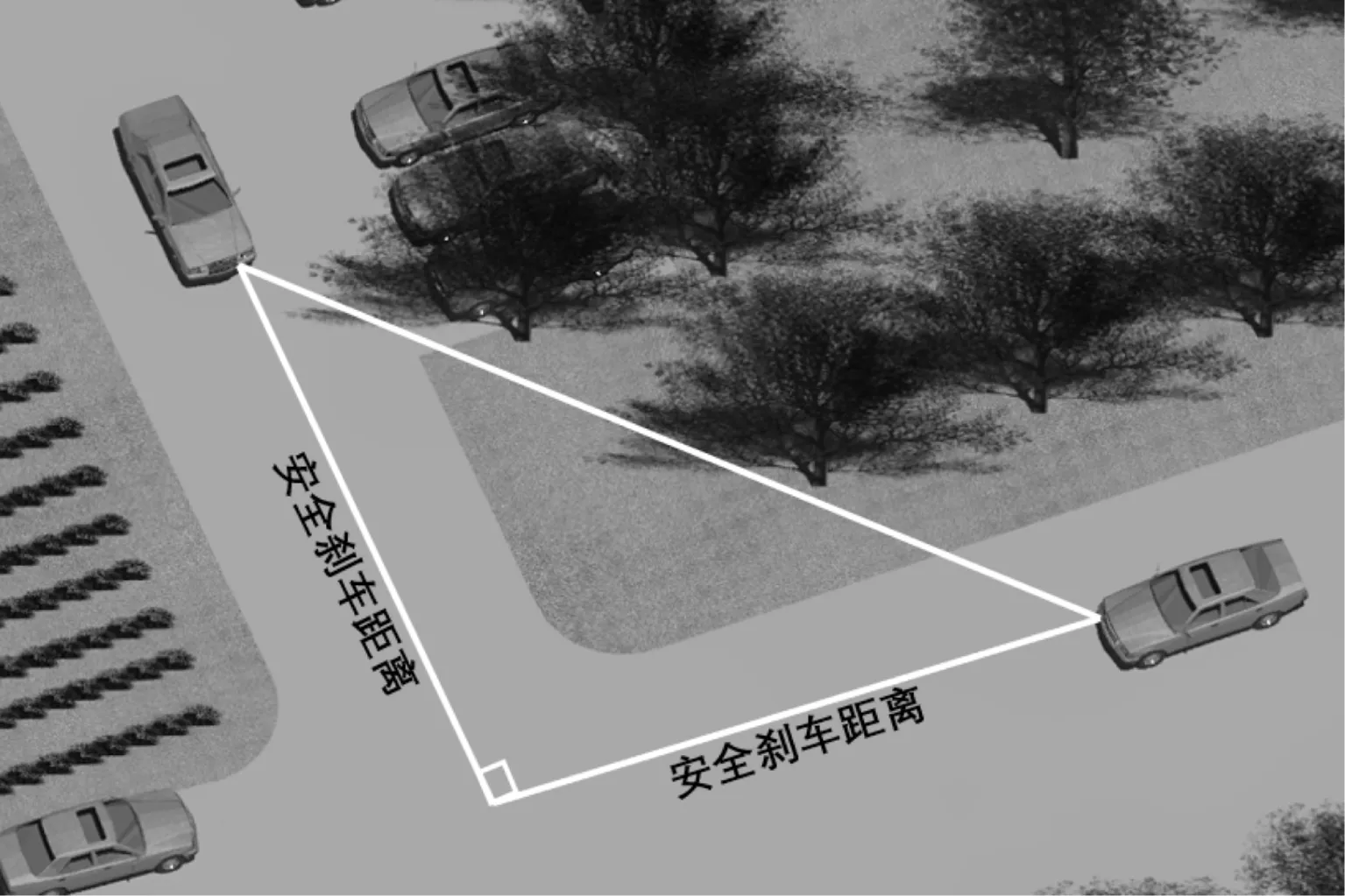
图2 安全刹车距离示意
选择20~30 km/h的速度区间,其安全距离为7.6~12.7 m,选取10 m为安全刹车距离进行研究。
3.2.2 视线遮挡情况分析
使用Revit的漫游功能,对于视线遮挡问题的情况,根据遮挡情况的不同情况对路口进行分类,总共可以分为4类路口。
3.2.2.1 一类路口
另一方向来车,但发现其时的距离大于10 m的。以下路口为一类:路口1、路口2、路口、路口5、路口6、路口9、路口11、路口12、路口13、路口14、路口15、路口19、路口20。
由于此类路口发现来车距离大于安全刹车距离10 m,属于安全路口因此不作分析。
3.2.2.2 二类路口
另一方向来车,但发现其时的距离大于5 m,小于10 m的。对二类路口作出以下具体分析,见表3。

表3 二类路口具体情况分析
以路口16为例,其路口平面俯视如图3所示。

图3 路口16刹车距离及视线遮挡情况分析
3.2.2.3 三类路口
另一方向来车,但发现其时的距离小于5 m的。三类路口造成目视距离不足的原因和二类路口相同,区别在于,三类路口的情况更加紧急,安全的隐患更大,急需改善。我校不存在三类路口因此不作讨论。
3.2.2.4 四类路口
十字路口,两面来车,不能满足20 m×10 m的等腰直角三角形的可视范围的。只有国重楼楼下的路口4为四类路口。此路口造成刹车距离不足的原因有2个:
(1)部分植被过于茂密,驾驶员在转弯时看不见左(右)方向的情况。
(2)部分车辆遮挡住了视线,导致刹车距离不足。
3.2.3 风险识别和评估总结
根据对校园道路的风险识别与分析,并在实地考察的基础上与三维模型进行对照,项目组将导致校园道路交通风险的主要因素分为几种:①非机动车辆和行人过马路干扰严重;②车辆随意停放;③分叉路口车辆行驶方向混乱;④视线被遮挡导致驾驶员存在视野盲区,刹车距离不足。
在后文中将针对性的对此类问题进行整改和优化。
4 校园道路交通风险应对以及优化对比
4.1 风险应对建议
运用Revit软件建立场地模型,结合Revit漫游模拟的驾驶员视角角度进行分析,可以利用降低或移除路口遮挡视线性的植被、优化道路拐角的形状,增设固定反光镜等方法,改造路口的视线情况,使驾驶员视野增大、视野盲区减小。为了在经过路口时保持安全刹车距离,提前发现侧向来车以及道路上可能突然出现的行人等,及时做出反应,使得道路设施符合安全设计标准,项目组提出了优化建议,形成校园道路优化方案:
(1)将原来的道路扩宽,设置路障,强行将机动车辆与行人分开,防止行人通过的区域与机动车辆混合,在实在无法避免人车交流的地方设置红绿灯,从时间上进行人车分离。
(2)去除在转弯处遮挡视线的障碍物(例如植被、路标牌、岗亭等)。
(3)存在违经常规停车的地方设立间隔为1~2 m的防撞立柱。
(4)在不影响交通安全和师生行走的地方设立临时停车位。
(5)在三岔路口中间设置围栏或者路障划分出道路,并进行道路渠化,规范车辆行驶方向。
(6)对于校内随意停车问题进行整治,将随意停放的车辆进行拍照记录。
4.2 典型路口优化效果分析
项目组对所有具有交通风险的路口进行优化设计,并利用软件模拟分析其优化效果,本文仍以路口16作为典型实例进行展示。
路口16的风险是由于部分车辆停留在路边平台,而导致车辆经过转角时视线遮挡明显,因此提出优化方案:
路边平台旁设置足够的停车位,使车辆不再停放在平台处,从而使刹车距离大于10 m,且斜向观察路口时视线不会被遮挡,在接近转角处的平台处设置防撞立柱,避免有车辆强行驶上平台。防撞柱的高度与宽度设计不会遮挡驾驶员的视线,使停放的车辆不会遮挡驾驶员的视线,还可以使刹车距离增加到10 m。
优化前效果如前文中图3所示,在平台上有车辆停放时,会形成明显的视线遮挡,无法做到两方向的车辆发现对方时离交汇点的距离都达到10 m的基本要求。
在采取上述优化方案后,其效果如图4所示,由于取消了平台上的车辆停放可能,使得道路上的车辆在路口处可以获得宽阔的侧方视野,达到了两方向车辆目视发现对方时到达交汇点距离都达到10 m的要求。
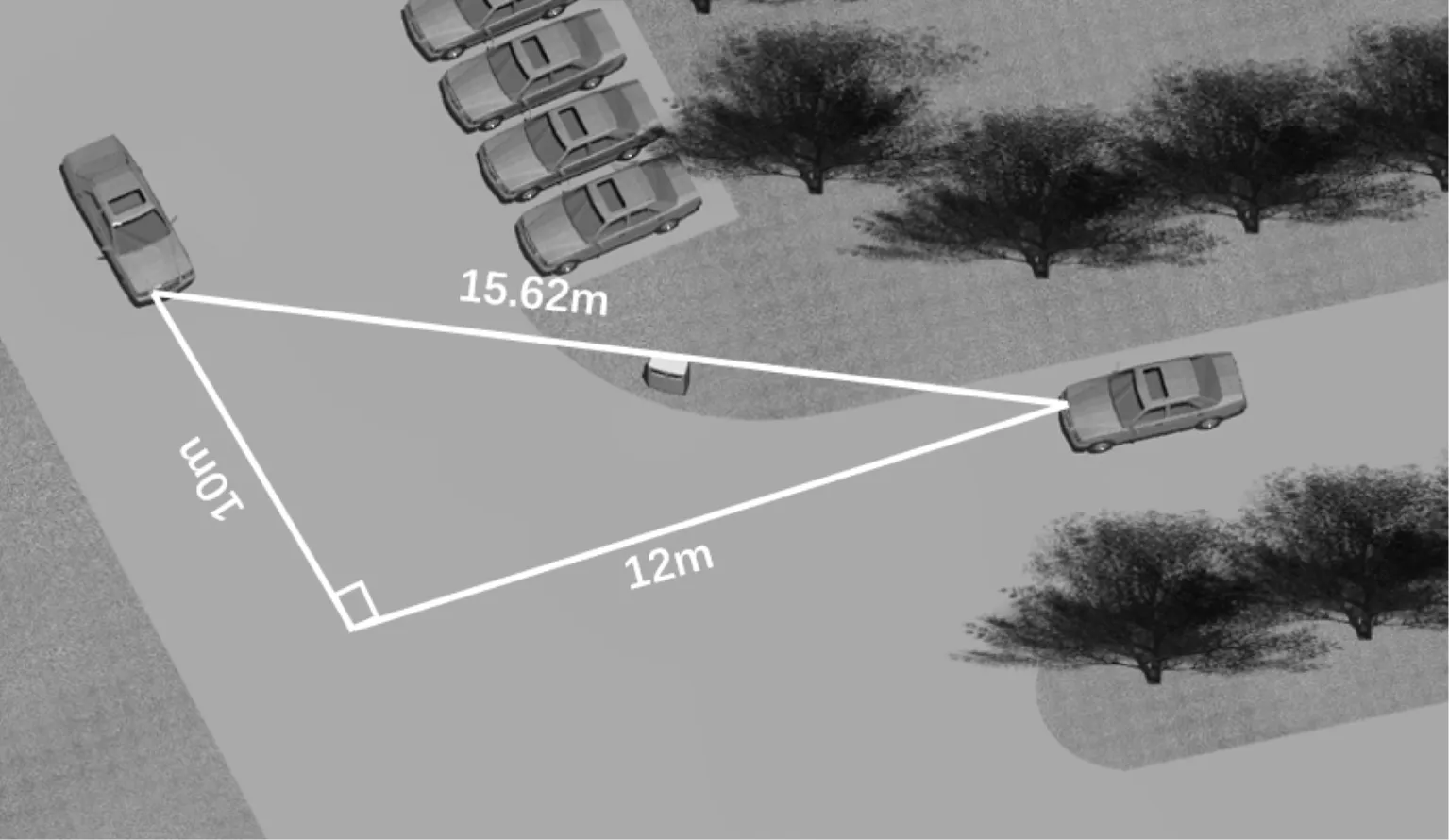
图4 路口16优化后俯视
由此可见,针对性地对路口进行设计调整,可以在遵守交通规则,有效限速的前提下有效降低交通事故发生的隐患。
5 结论
本文对于校园内道路交通风险因素的识别提供了BIM技术这一探索性的方案,由于BIM技术的三维可视化效果,实际上是可以实现在道路规划设计付诸实施前有效的进行前期模拟和设计优化的。这样的优化可以有效避免在道路建成后出现的各种交通事故隐患,同时这一设计思想也可以应用于景观设计、路灯布置等设计方案的优化中。
猜你喜欢
特区文学·诗(2021年6期)2021-12-22
青年文学家(2020年22期)2020-08-31
小学生导刊(2018年34期)2018-12-18
山东青年(2016年3期)2016-02-28
科普童话·百科探秘(2015年6期)2015-10-13
伴侣(2015年5期)2015-09-10
大众科学(2015年10期)2015-09-10
当代贵州(2015年19期)2015-06-13
母子健康(2015年1期)2015-02-28
岷峨诗稿(2014年3期)2014-11-15