无人机倾斜摄影应用于“房地一体化”测量
——以高要区莲塘镇某村为例
2022-09-23 03:37卢立果孔双双
东华理工大学学报(自然科学版) 2022年1期
卢立果, 梁 乔, 孔双双
(1.东华理工大学 测绘工程学院,江西 南昌 330013;2.自然资源部环鄱阳湖区域矿山环境监测与治理重点实验室,江西 南昌 330013; 3.安徽精衡勘测规划评估咨询有限公司,安徽 淮南 232000)
为实施乡村振兴战略、推动农村制度改革、加快城乡融合发展,2019年中央一号文件明确提出,要加快推进宅基地使用权确权、登记、颁证工作,力争在2020年基本完成(李芳,2019;徐小强等,2019)。传统“房地一体化”测量方式主要有两种:一是解析法,即全野外测量法;二是图解法。解析法是采用GNSS RTK技术结合全站仪实地测量,该方法测得的点位精度高,但需投入大量人力、物力,且效率低、周期长、成本高(陈成斌,2020;王果等,2017)。图解法是使用已有的大比例尺航天数字正射影像、地形图等,通过图解的方式量算获取界址点的平面坐标,这种方法由于满足确权需求的底图较少,且大比例尺航天数字正射影像所获取的房屋包括了其房檐部分,并不能真实地反应界址点的坐标,所以需内外业人员相互配合完成缩减房檐的工作(邓世赞等,2020)。因此,需要选择新的测量技术以满足快速高精度“房地一体化”测量的需求。
近年来快速发展的无人机倾斜摄影测量技术,具有测量场景真实、数据成果丰富以及作业效率高等特点,已在国土资源、农业、林业、城市规划、电力巡检等行业中推广应用(陶国强等,2019;许亚男等,2020),为“房地一体化”测量提供了可能(崔瑶瑶等,2017;原喜屯等,2019;游芳,2020)。因此本文将无人机低空倾斜摄影测量技术用于“房地一体化”测量工作中,以实际生产为例,探讨其具体工作流程,并对测量结果进行精度评定和效率对比分析。
1 无人机倾斜摄影测量原理与方法
无人机倾斜摄影测量技术是以无人机为飞行平台,在其上搭载多视角传感器和POS系统,从垂直、倾斜等不同角度拍摄获取目标全方位影像,同时记录下摄影瞬间的航高、航速、航向重叠、旁向重叠和位置等信息。垂直地面角度拍摄获取的影像称为正片,镜头朝向与地面成一定夹角拍摄获取的影像称为斜片(王佩军等,2005),正片和斜片包含有丰富的目标顶面信息、侧面信息及纹理信息。采集得到的影像数据需进行影像预处理,通过区域网联合平差、空中三角测量、倾斜影像密集匹配、DSM点云生成、TIN构建、纹理映射及实景三维建模等步骤(张祖勋等,1997;王之卓,1979),从而生成真实的目标三维模型,最后在三维模型上采集获取目标的相关信息。
2 测量步骤
无人机低空倾斜摄影测量技术用于“房地一体化”测量地作业流程如图1所示。首先进行测区踏勘与像控点的布设量测,然后开始规划航线并获取影像,其次运用Context Capture软件生成三维模型和数字正射影像(DOM)),再将三维模型和DOM导入至清华山维EPS软件中采集房屋信息,最后由外业人员实地逐一核对并补测遗漏房屋,检查成果质量是否合格。若合格,则直接成图,否则返回外业核对并进行补测,直到质量检查合格后再成图。

图1 “房地一体化”测量流程Fig.1 Measurement flow of "House-land Integration"
3 应用分析
3.1 数据处理
基于上述处理步骤,以广东省高要区莲塘镇某村为对象,开展“房地一体化”测量工作。该村属于亚热带季风气候,地势相对平坦,房屋主结构较为简单,但附属房屋较多。本次工作选用的是大疆创新Phantom 4 Pro V2.0无人机进行航拍。
(1)现场踏勘了解测区的一些基本情况。在此基础上,在测区内均匀地布设像控点,靶标采用“L”设计,容易区分内外角等特征信息,布设于村庄主路面,间距100~150 m,大小20 cm×20 cm(魏国忠,2020)。像控点的坐标利用GNSS RTK量测(曹良中等,2017)。
(2)规划飞行航线。先在大疆创新DJI GO软件中连接飞机,设置相机的各种参数,如曝光值、快门时间、照片的尺寸和输出格式等。然后打开Altizure软件,选定无人机的型号,创建飞行任务。在创建飞行任务时,需先在加载的Google卫星影像地图上选出测区范围,然后依次设置飞行航高、相机型号、航向重叠率、旁向重叠率、最大速度、最短拍摄间隔及每条航线相应的相机倾斜角度等参数。航线参数设置值如图2所示。设置好各项参数后,即可执行航拍任务。

图2 Altizure软件航线规划参数设置Fig.2 Parameter settings of route planning in Altizure software
(3)影像处理。完成影像采集工作之后,需对原始影像进行筛选、排序命名、色调处理等工作,然后将预处理好的影像数据添加到Context Capture软件中。在空三加密过程中,像控点刺点误差应控制在一个像元内,三维模型分辨率满足不大于0.05 m的条件时才可以生成需要的DOM和三维模型(邱春霞等,2020)。空三运算结果如图3所示,DOM和三维模型分别如图4和图5所示。

图3 空三运算结果Fig.3 Result of empty three operations
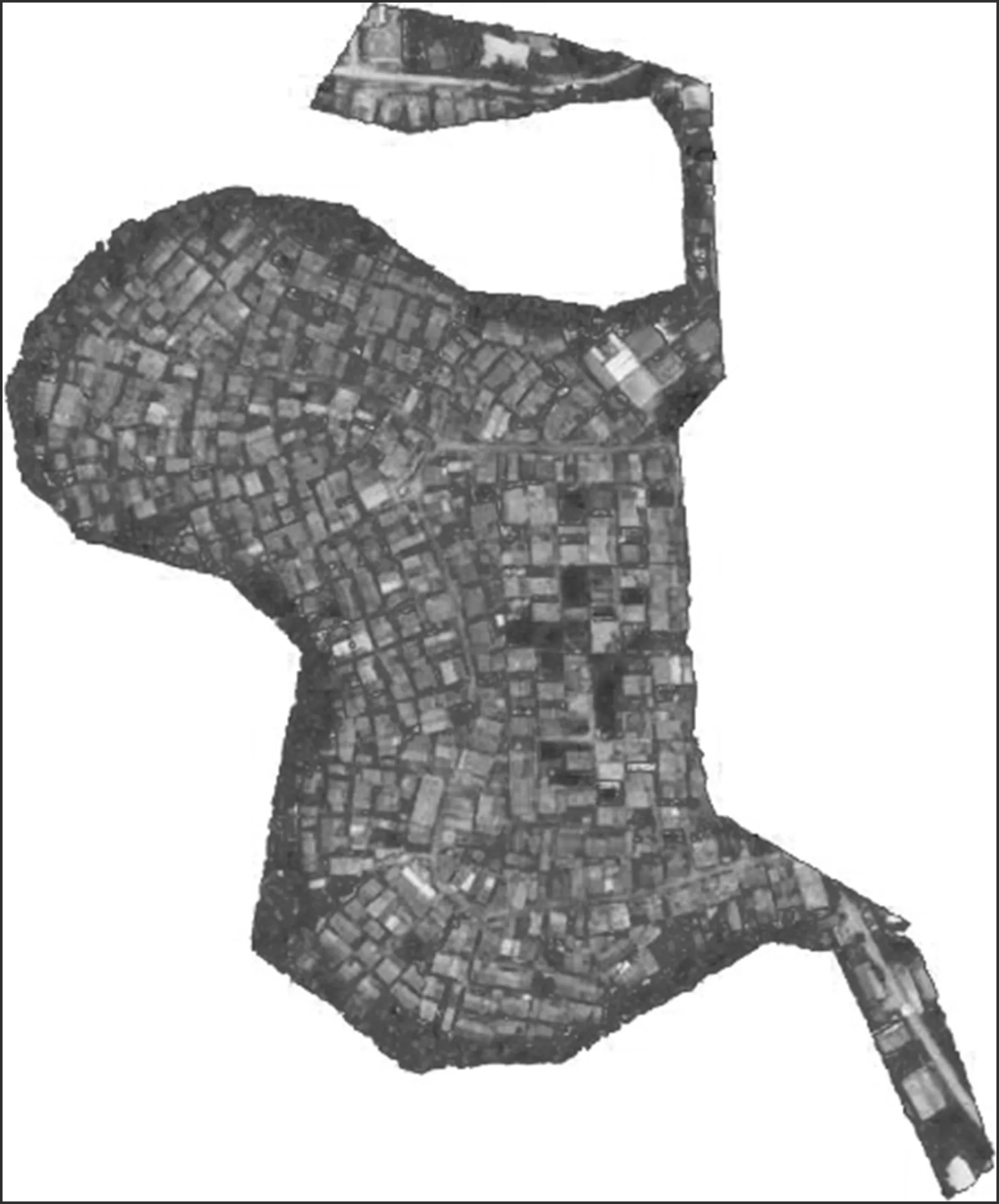
图4 生成的DOMFig.4 Generated DOM

图5 生成的三维模型Fig.5 Generated 3D model
(4)采集房屋信息。首先在清华山维EPS“三维测图”下拉框中的“osgb数据转换”中快速将三维模型转换为dsm格式;然后在软件中同时打开两个工作窗口,一个加载DOM,一个加载三维模型,即可开始房屋信息采集工作;最终成果文件选择dwg格式输出,如图6所示。

图6 清华山维EPS导出的成果图Fig.6 EPS output diagram
(5)外业核对及补测。外业人员根据成果图实地比对,检查航拍是否有遗漏。补测主要是针对在清华山维EPS软件中无法绘制的房屋或遗漏的房屋,采用全野外测量法,用RTK+全站仪测量,然后将测得的数据导入至南方CASS软件中,并绘制出相应的房屋平面图。
3.2 精度评估
本文在测区内均匀选取40个界址点参与平面精度检查,用RTK+全站仪量测得到的点位坐标作为实测坐标,对比通过模型采集到的数据与实测数据之间的差值,计算出点位的平面误差,同时对几种“房地一体化”测量方式进行效率对比。点位平面精度检查如表1所示,点位平面误差如图7所示,三种测量方法的作业效率综合对比如表2所示。
点位中误差m的计算公式:
(1)
式中,Δd为点位平面误差,n为界址点数。
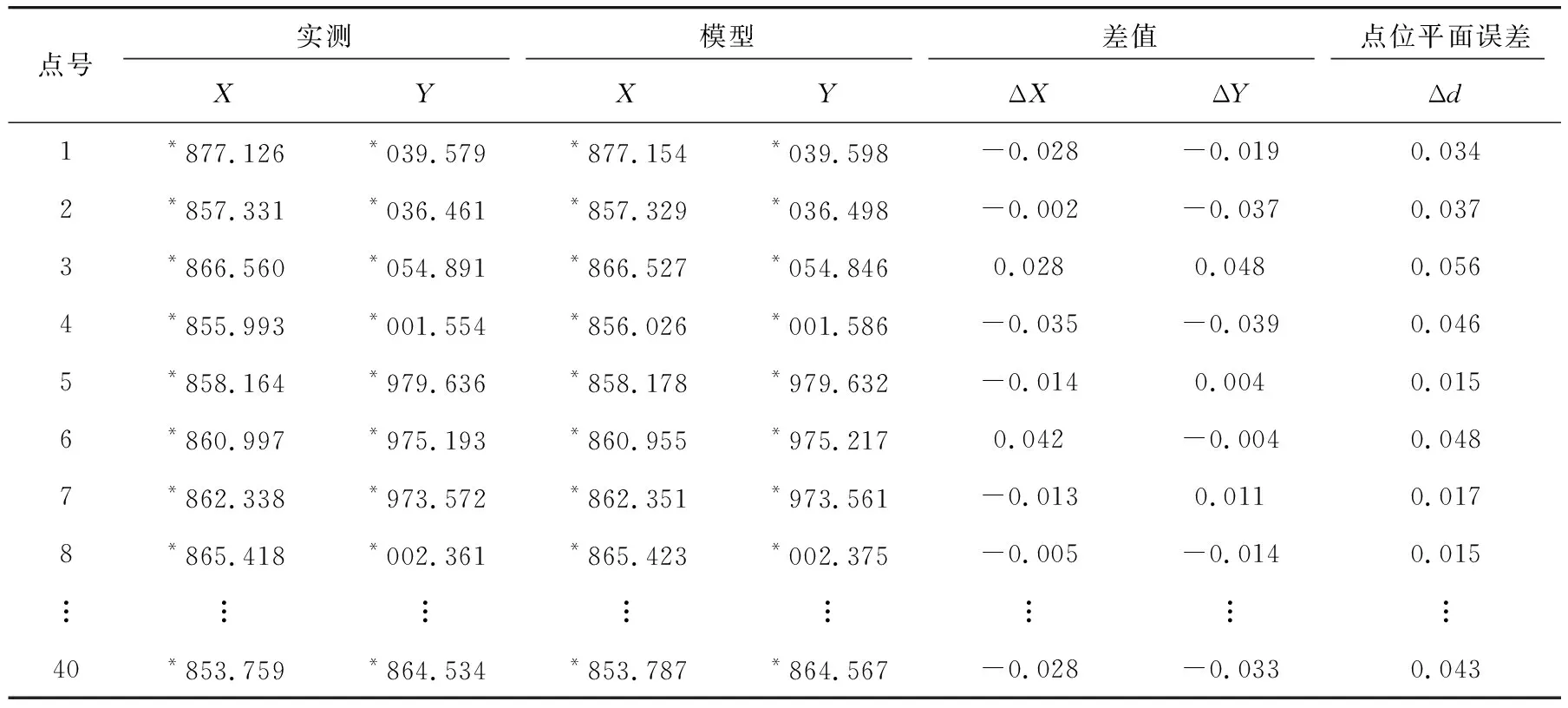
表1 点位平面精度检查表

表2 三种测量方法的作业效率综合对比

图7 点位平面误差Fig.7 Point plane error
由表1和图7可知,检查点的最大点位误差为7.3 cm,由公式(1)计算出点位中误差为±4.3 cm,满足《地籍调查规程TD/T 1001—2012》(中华人民共和国国土资源部,2012)中解析界址点允许误差不超过±10 cm,且中误差不超过±5.0 cm的测量要求。因此使用无人机倾斜摄影建立三维模型来采集房屋数据的这种测量方法,其精度可以满足“房地一体化”的测量需求。由表2可知,建立三维模型采集房屋数据的方法所需的人力最少、工作时长最短,故这种方法相比传统的解析法、图解法更为高效。
4 结论
本文将无人机倾斜摄影运用于“房地一体化”测量之中,结合高要区莲塘镇某村农房项目进行探讨分析,结果表明:
(1)在平面精度上,通过模型采集得到的界址点平面误差满足不超过±10 cm,点位中误差不超过±5.0 cm的测量要求。因此,无人机倾斜摄影技术可以应用于“房地一体化”测量工作。
(2)相比传统的解析法、图解法测量,通过无人机倾斜摄影建立三维模型来采集房屋数据的方法不但能够改善作业人员的工作环境、大幅度提升作业效率,而且能够降低投入成本。因此,无人机倾斜摄影技术将会大规模地应用到测绘行业中。
致谢:感谢湖南省南方测绘科技有限公司提供的无人机影像数据。
猜你喜欢
科技风(2019年8期)2019-10-21
中学生数理化·高三版(2019年1期)2019-07-03
中学生数理化·高三版(2019年1期)2019-07-03
神州·上旬刊(2018年5期)2018-06-05
证券市场红周刊(2018年37期)2018-05-14
江苏教育·中学教学版(2017年3期)2017-04-07
试题与研究·高考数学(2016年1期)2016-10-13
卷宗(2015年1期)2015-07-10
散文百家·下旬刊(2014年6期)2014-08-27
绿色科技(2014年3期)2014-07-11