针尖增强拉曼系统高数值孔径物镜对焦方法研究
2022-09-21 03:06孙晓爽高思田祝敏豪刘林伟
计量学报 2022年8期
孙晓爽,高思田,黄 鹭,祝敏豪,刘林伟
(1.中国计量科学研究院,北京100029;2.中国计量大学计量测试工程学院,浙江杭州310018)
1 引 言
针尖增强拉曼光谱术TERS(tip-enhanced Raman spectroscopy)是一种将SPM(scanning probe microscope)和SERS(surface enhanced Raman scattering)技术相结合用以进行样品表面纳米尺度研究的技术[1,2]。与传统拉曼光谱术相比,TERS具有更高的纳米尺度空间分辨率[3,4],能够提供更丰富的样品物质结构信息,被广泛应用于材料学[5]、表面科学[6]、生物化学[7,8]、电化学[9]、医疗研究[10,11]等领域。
在TERS测量系统中,为提高拉曼信号激发/收集效率,使入射光经高数值孔径物镜聚焦在针尖与样品接近处以形成激发光场,获取样品准确的物质结构信息。因使用的物镜具有高数值孔径NA、高放大倍率的特点,使得系统景深达到μm量级,测量过程中轻微的振动或样品表面高度的微小变化都将导致离焦现象,因此,在TERS测量系统中实现物镜的快速、精确对焦尤为重要。
目前,实现TERS测量系统中轴向精确对焦功能的主要方法有两种,即人工对焦法[12]和差动共焦轴向对焦法[13]。人工对焦法操作繁琐、效率低、易受主观因素影响,导致对焦结果重复性差;差动共焦轴向对焦法因需要在光路中增添探测器等光学器件,增加了系统的复杂性,耗费硬件资源,存在焦点位置易漂移等问题。
图像调焦法在显微视觉系统中具有较广泛应用[14~17]。该方法通过选用合适的调焦评价函数对物镜成像的图像进行处理判断对焦状态,从而控制物镜移动,具有实时性、便捷性和高灵敏度,并且不增加额外的硬件。为实现物镜的快速与准确对焦,本文提出一种基于调焦评价函数分析CCD相机拍摄的光斑图像实现自动对焦的方法。介绍方差函数、Tenengrad函数的调焦原理;给出了所研制的TERS测量系统自动对焦光路并编写了调焦算法;通过对样品表面自动对焦实验分析得出比较适用于TERS测量系统自动对焦的调焦评价函数;验证所选函数应用于TERS测量系统物镜对焦的准确性和稳定性。
2 调焦评价函数
TERS测量系统自动对焦光路如图1所示。CCD相机位于聚光镜的焦距处。入射光经物镜在样品表面形成聚焦光斑。该光斑再经物镜、单陷波滤波镜、分光镜和聚光镜被CCD相机获取。
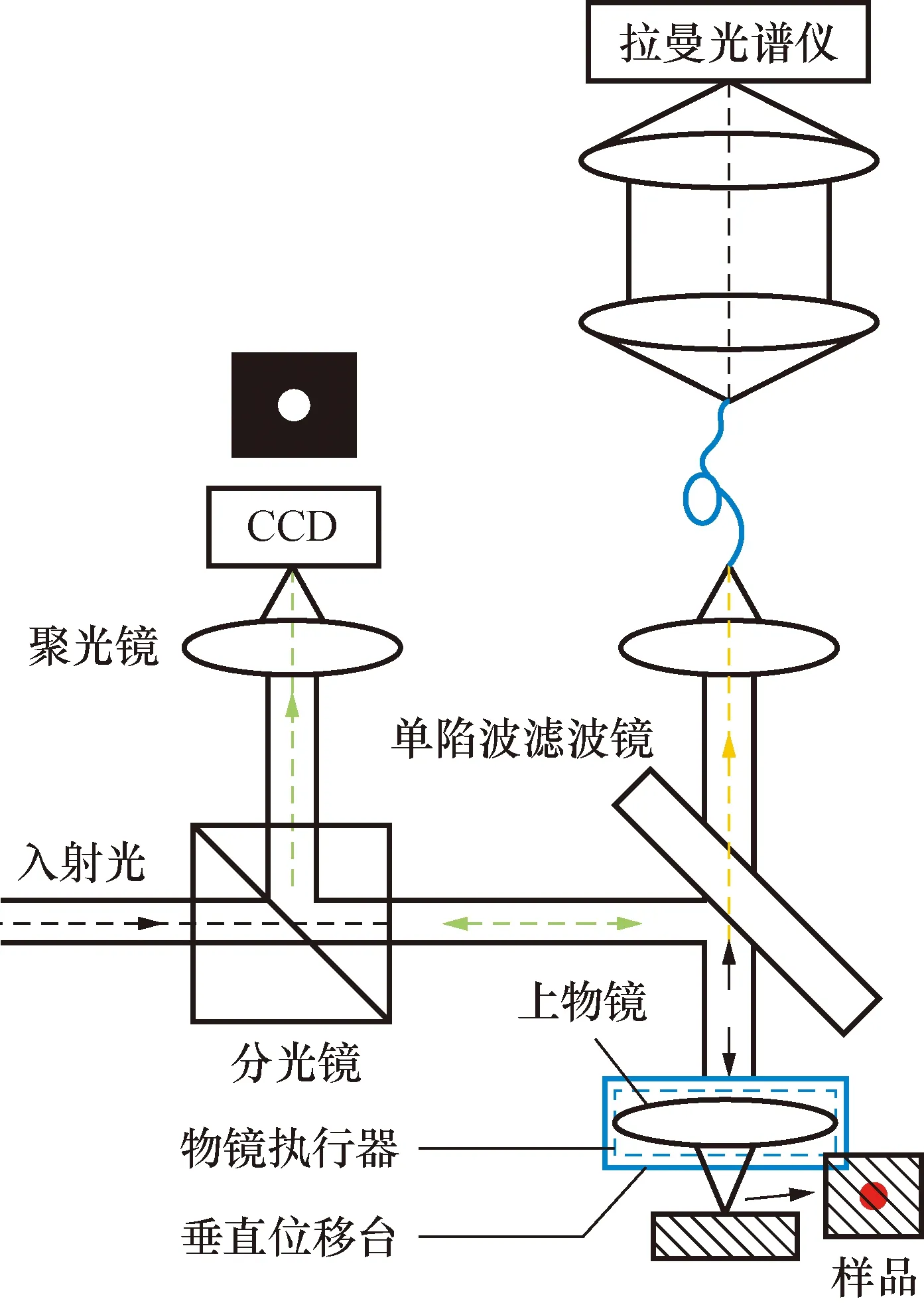
图1 自动对焦光路Fig.1 Auto focusing optical path
CCD相机拍摄的图像如图2所示,横纵坐标表示像素点数。当样品与物镜距离d=f(准焦)时,入射光聚焦在样品表面,聚焦光斑亮且小,成像在CCD相机上的像斑也亮且小,见图2(a);当样品与物镜距离d≠f(离焦)时,物镜焦点与样品表面存在一定距离,样品表面上光斑发散且亮度较弱,成像在CCD相机上的像斑也暗且分散,见图2(b)。样品与物镜间的距离与物镜焦距偏差越大,光斑越分散,像斑也越分散,亮度越低。因此,可利用调焦评价函数来分析CCD相机接收到的光斑图像的x,y坐标像素值判断离焦程度。
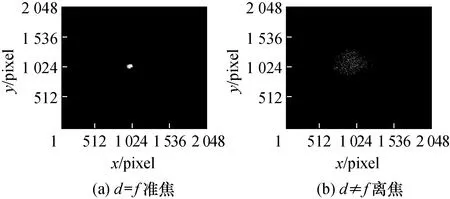
图2 CCD相机拍摄图像Fig.2 Images of CCD camera
TERS测量系统在对焦时需具有较高准确性和重复性,因而选择合适的调焦评价函数极为重要,理想的调焦评价函数需要具备无偏性、实时性和鲁棒性较强等特点。本文在方差评价函数、Tenengrad评价函数的基础上开展实验,以选择适用于TERS测量系统自动对焦的调焦评价函数。
2.1 方差评价函数
方差函数的陡峭区宽度较大,在该区域位置的轻微改变及其他因素的变化都会引起调焦函数值的剧烈变化,该函数具有较大的调焦范围。方差函数定义为
(1)
式中:I(x,y)表示图像在(x,y)像素点处的强度;μ表示图像的平均灰度值:
(2)
其中,M和N分别表示图像像素的行数和列数。
2.2 Tenengrad评价函数
基于Sobel算子的Tenengrad函数综合考虑图像在水平方向和垂直方向的梯度,并且为保证充分利用图像边缘信息,该函数对梯度进行平方运算来放大图像边缘的梯度。表达式为
(3)
式中:S(x,y)表示图像中(x,y)像素点处灰度值与Sobel算子的卷积:
(4)
其中:Gx(x,y)和Gy(x,y)分别表示图像中(x,y)像素点处灰度值在x和y方向上的梯度:
(5)
式中I(x,y)表示图像在像素点(x,y)处光强度。
(6)
3 系统研制
针对TERS测量系统中的技术难点研制自动对焦运动控制单元。该单元可以实现在自动对焦过程中控制位移台运动,最终将入射光通过高数值孔径物镜聚焦在探针尖端形成激发光场并进一步激发样品的拉曼散射信号。
3.1 针尖增强拉曼系统自动对焦光路
在图1的TERS测量系统中,波长为532 nm的激光经耦合器耦合进入光纤中,从光纤另一端面出射后,再经扩束准直、偏振态调整后入射至Semrock 532 nm单陷波滤波镜处,反射后再经物镜聚焦在探针尖端形成激发光场并进一步激发被测样品。
激光器选用lwgl532的单纵模激光器,相关技术参数如表1所示,光斑直径小,线宽窄且单色性好、相干性好,光斑指向稳定性好,可满足TERS测量系统对激光光源的要求。
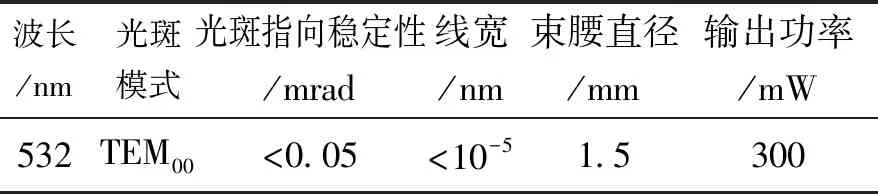
表1 激光器相关技术参数Tab.1 Technical parameter of laser
物镜选用的是Mitutoyo高分辨率远场矫正显微物镜,相关参数如表2所示。

表2 物镜相关技术参数Tab.2 Technical parameter of objective lens
景深计算公式为
(7)
式中:λ为入射光波长;NA为数值孔径;n为介质的折射率。
将相关参数代入式(7)得到物镜的景深L=0.393 μm。使用高数值孔径物镜后,减小聚焦光斑的面积,也减少激发区域内远场拉曼信号背景噪声,提高TERS探测的信噪比。同时,高数值孔径物镜能有效收集更大空间立体角内的拉曼散射信号,提高拉曼信号的收集效率。
同时,入射光经高数值孔径物镜聚焦形成的光斑被CCD相机获取,利用调焦评价函数分析该光斑图像即可判断离焦程度。CCD相机性能参数如表3所示,该相机具有高量子效率,可使信噪比最大,结果更准确,满足系统成像需求。

表3 CCD相机相关参数Tab.3 Technical parameter of CCD camera
3.2 调焦控制算法编写
自动对焦流程如图3所示。
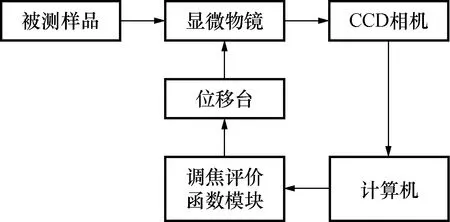
图3 自动对焦流程图Fig.3 Auto focus flow chart
激光入射后,CCD相机实时采集被测样品表面图像并传递至计算机主控制单元,主控制单元调用调焦评价函数模块计算图像的调焦评价值,依据该评价值的大小控制位移台带动物镜沿垂直方向上下移动。经过多次移动,直至CCD相机拍摄到的光斑最亮最小,此时物镜将入射光聚焦在被测样品表面,自动对焦过程完成。其中,调焦评价函数模块直接影响调焦的准确度和效率,下面将重点加以详细介绍。
调焦评价函数模块流程如图4所示,主要分为快速粗调焦和慢速细调焦两个阶段。调焦开始时,初始化位移台位置,确保入射光经物镜聚焦后的焦点在被测样品正上方,之后依次进行快速粗调焦和慢速细调焦。

图4 评价函数模块流程图Fig.4 Flow chart of evaluation function module
(1) 快速粗调焦阶段:垂直位移台带动物镜快速向下移动,通过计算机记录下垂直位移台当前位置和对应的CCD相机获取的图像,并进一步由所选调焦评价函数计算出图像的调焦评价值,实现垂直位移台所处位置与调焦评价值一一对应。移动过程中,持续判断当前位置对应的调焦评价值是否满足停止条件:如果满足,物镜执行器自当前位置(K点)向上移动150 μm(M点),随即进入慢速细调焦阶段;如果不满足,则垂直位移台继续向下移动。
(2) 慢速细调焦阶段:物镜执行器以低速带动物镜自M点向下移动300 μm(N点),同快速粗调焦阶段,实现物镜执行器所处位置与调焦评价值一一对应以绘制调焦评价函数曲线,通过曲线求出焦点F位置,将物镜执行器移至对应位置处。
快速粗调焦阶段的目的是快速接近焦点位置,确定细调焦范围,提高调焦效率,避免陷入由噪声引起的局部最优解,提高对焦准确性。方差函数在焦点附近时的评价值远大于远离焦点处的评价值[18],Tenengrad函数也如此。因此,当垂直位移台快速移动时,相邻两图像对应位置间距较大,当移动至焦点附近时,对应的调焦评价值将陡然增大,可将该点视为异常值,利用t分布判断快速粗调焦阶段是否停止。具体判断条件公式如下:
(8)

(9)
根据图4流程,基于VC编写相关控制程序并封装成独立模块。其中,为减少程序计算量和提高自动对焦效率,在程序中添加焦点区域选择功能,如图5所示,CCD相机仅在方框区域内成像,进一步降低了空白区域的干扰,提高对焦精度。

图5 成像区域Fig.5 Imaging area
4 实验及结果分析
选择合适的调焦评价函数开展自动对焦实验。实验步骤如下:①打开控制程序,显示图像;② 选择焦点检测方式,方差函数或Tenengrad函数;③ 选择大小适当的成像区域;④开始自动对焦。实验中使用的样品为纯物质硫,表面较为粗糙。经多次实验调整,m、n的取值分别为0.15和21。
图6是采用方差函数、Tenengrad函数进行自动对焦实验的结果。
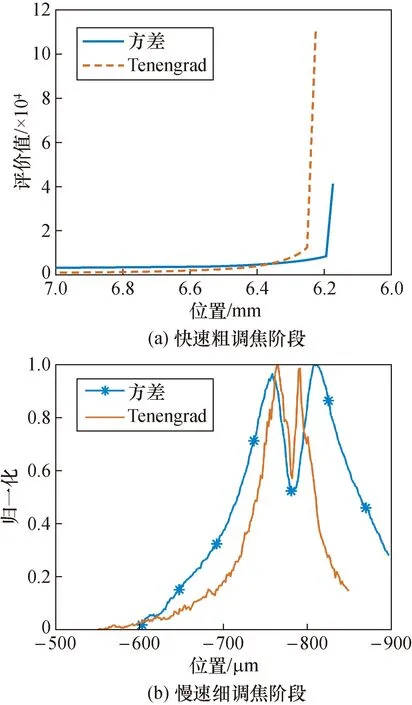
图6 方差和Tenengrad调焦函数评价曲线Fig.6 The variance and Tenengrad focusing function evaluation curve
图6(a)为快速粗调焦阶段,横坐标表示垂直位移台的位置;图6(b)为慢速细调焦阶段,横坐标表示物镜执行器的位置;两图的纵坐标均表示不同位置处CCD相机拍摄图像的调焦评价值,该调焦评价值是经公式(1)或公式(3)计算得到的。垂直位移台的标称范围为0~10 mm,物镜执行器的标称范围为-1~1 mm,闭环分辨率为1.25nm。由图6(a)可知,快速粗调焦阶段垂直位移台从某位置处开始向下移动,确保从正离焦处开始逐步靠近焦点位置;并且移动速度较快,大幅减少调焦时间,提高调焦效率;还可以有效掠过由噪声引起的局部最优解。慢速细调焦阶段评价函数归一化曲线如图6(b)所示,可以看出:两种调焦函数评价曲线趋势均呈“M”形分布,该分布是由CCD相机的饱和曝光量造成的。
系统中使用的激光为基模TEM00,以方差函数为例,慢速细调焦时,物镜执行器自M点开始向下移动,在M点时由于激光聚焦在样品表面上方较远处,此时CCD相机获取的样品表面像斑分散且亮度较弱,各像素点均未达到饱和曝光量。随着物镜执行器慢速向下移动,焦点逐渐靠近样品表面,CCD相机获取的像斑随之变小且亮度变亮,中心的像素点值饱和。越靠近样品表面,由像斑中心向外扩散越来越多的像素点饱和。
调焦函数归一化评价曲线如图7所示,当处于图7(a)中A点峰值对应的位置处时,焦点距离样品表面非常近,此时CCD相机获取的像斑大小虽略大于实际焦斑,但与焦斑大小相同处像素点均已饱和,且大于焦斑处也分布着部分能量,使得A点处方差值大于焦点F处方差值。同理,B点处方差值也大于焦点F处方差值,曲线呈“M”形分布。
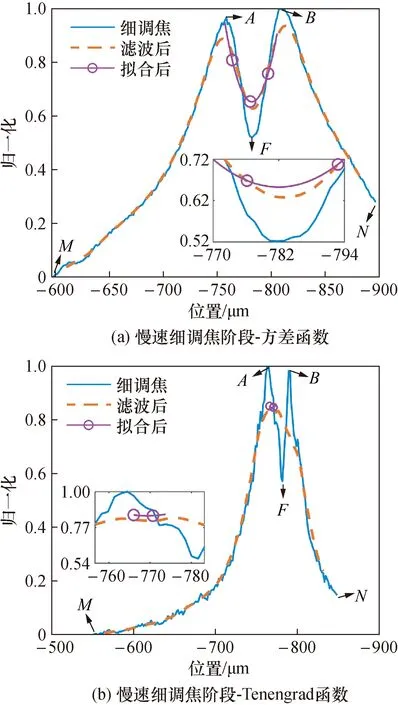
图7 调焦函数归一化评价曲线Fig.7 Focusing function normalization evaluation curve
结合实际情况,为提高对焦准确性,应选择两峰中间的谷值(极小值)所对应的位置作为焦点位置。为更进一步提高对焦准确度,对慢速细调焦曲线进行滤波以去除随机噪声的干扰,并对滤波后两峰值中间处曲线用最小二乘法拟合二次方程,选取拟合曲线极小值所对应的位置作为最终结果(见图7)。采用方差函数、Tenengrad函数经滤波拟合后结果所对应的焦点位置处CCD相机拍摄的图像如图8所示,横纵坐标表示像素点数。

图8 自动对焦图像Fig.8 Auto focus image
人工对焦时,需通过人眼实时观察CCD相机拍摄的像斑的大小、亮度来判断入射光是否聚焦在样品表面,因所选CCD相机的限制,易将图7(a)中A点或B点对应位置判断为焦点位置。与人工对焦相比,自动对焦更客观,准确性更高。
由图6(b)可知,与方差评价函数曲线相比,Tenengrad评价函数曲线更为粗糙,受噪声影响更大。原因是所选用的532 nm激光线宽小于10-5nm。当照射到表面粗糙的纯物质硫时会形成严重的激光散斑图像[19]。
不同的物镜位置产生的散斑图像也不同,由于梯度计算时为差分运算,易受噪声干扰,综上使得Tenengrad评价函数曲线更为粗糙。结合图8可知,与Tenengrad函数相比,使用方差函数的聚焦光斑更小、更亮,更适用于实现TERS测量系统的自动对焦。
为验证方差函数用于TERS测量系统自动对焦时的重复性和鲁棒性,进行多次自动对焦实验。实验结果如表4所示,其中,a、b两组为不同时间的实验结果。每组自动对焦实验下多次对焦结果非常接近,且a、b两组自动对焦结果的无偏估计标准差分别为:0.213 μm、0.231 μm,表明方差函数在用于TERS测量系统自动对焦时不仅具有较高的准确度,还具有较高的重复性和鲁棒性,能够满足针尖增强拉曼系统对焦要求。

表4 自动对焦实验结果Tab.4 Results of autofocus μm
5 结 论
本文针对TERS测量系统中高数值孔径物镜对焦较难的问题,提出选用合适的调焦评价函数评价光斑图像灰度值来自动对焦的方法,并在实际焦点定位时选择“M”形曲线的谷值作为最终结果。重复实验结果表明:
(1) 与Tenengrad调焦评价函数相比,方差评价函数更适用于TERS测量系统自动对焦,聚焦到样品表面时对焦结果的无偏估计标准差小于0.25 μm,具有较高的重复性和鲁棒性;与人工对焦相比,具有更高的对焦效率。
(2) 快速粗调焦阶段可以提高调焦效率,具有一定的抗干扰能力,可避免陷入局部最优解。
(3) 慢速细调焦阶段因CCD相机饱和曝光量造成评价函数曲线在焦点附近呈现“M”形分布,可通过二次拟合提高调焦精度。
(4) 选取适当的对焦区域,可以剔除无关背景的干扰,提高对焦准确性;可以减少评价函数的计算量,提高调焦效率。
(5) 实现的高数值孔径物镜自动对焦法具有可移植的优点,可嵌入到如表面增强拉曼光谱探测系统等其它需实现自动对焦的拉曼系统中。
猜你喜欢
桂林电子科技大学学报(2022年3期)2022-10-26
阅读(高年级)(2019年9期)2019-11-15
VOGUE服饰与美容(2019年8期)2019-11-12
阅读与作文(小学高年级版)(2019年8期)2019-10-16
小资CHIC!ELEGANCE(2019年28期)2019-09-12
中学生数理化·八年级物理人教版(2015年11期)2015-11-30
科学中国人(2015年8期)2015-07-14
空间控制技术与应用(2015年1期)2015-06-05
科技创新导报(2014年28期)2014-12-01
中国摄影(2014年8期)2014-11-07