
人造板上下料机械手的动力学分析及仿真
2022-09-21 12:19:20孙锐薛勃王鑫杨春梅宋文龙
包装工程 2022年17期
孙锐,薛勃,王鑫,杨春梅,宋文龙
人造板上下料机械手的动力学分析及仿真
孙锐,薛勃,王鑫,杨春梅,宋文龙
(东北林业大学,哈尔滨 150006)
实现包装生产线上的自动化搬运作业,全面系统地了解人造板上下料机械手的动态特性,探究该机械手各关节所需驱动力大小及变化规律。建立人造板上下料的三维结构模型,制定机械手一周期内的运动流程,通过拉格朗日方程法对机械手进行建模,通过系统动力学仿真软件(Adams)仿真出机械手的动态特性并验证动力学模型的准确性。得到了机械手各关节(角)速度、(角)加速度、力与力矩变化曲线,(角)速度变化平缓无突变,(角)加速度、力与力矩曲线在6~9 s时变化剧烈,仿真曲线与动力学模型数据基本拟合。动力学模型建立正确,后续应优化驱动或通过结构优化方式使整个运动过程更加平稳。
人造板上下料机械手;静力学分析;拉格朗日方程法;动力学分析;Adams仿真
由于人们对高档家具要求的不断提高以及全球森林面积的不断缩减,实木在家具行业的使用量不断减少,取而代之的是综合利用率比较高的人造板[1]。受此影响,人造板的下游产业发展极其迅速,人造板的搬运、上下料等工作已经成为各厂家不可避免的问题,采用人工会造成生产效率低下、加剧成本等弊端,同时此机械手也可广泛应用于包装行业作为码垛或搬运机械手,故设计、分析此机械手尤为重要。研究机械手的动力学是研究其驱动与控制的基础[2],目前,国内外学者对机械手结构设计及动力学进行了很多研究,陈亚梅为了分析码垛机器人臀部变形对其运动精度的影响,以ABB的IRB760型机器人为分析对象分别进行刚体动力学仿真和刚柔耦合动力学仿真,准确的分析了码垛机器人的运行状态 [3];程思远等基于机器人的组成结构建立动力学模型,并对各关节的力矩进行详细分析,通过对比关节角度信息,验证结果的正确性,为后续控制系统设计及电机选型提供了参考[4]。程亚兵等对所设计的双相正时套筒链传动系统进行动力学仿真分析,选取部分动态特性参数与单相系统进行对比,结果表明该双相正时套筒链传动系统的传动性能优于单相正时系统。磨损失效研究为进一步分析正时套筒链传动系统的使用寿命提供了一定的科学依据[5]。Zhu[6]为了探究2自由度变幅机构运动特性对机构进行运动学和动力学建模及仿真,最后实验验证所建立的动力学模型能很好的反映所提出的变幅机构的动态特性。刘泽新等提出了一种用于森林防火的基于椭圆定理的可变形履带平台,为了充分了解履带平台的越障性能,对履带平台典型障碍进行动力学分析,根据理论值结合林区实际情况计算,用Adams建立仿真平台,对攀爬高地及跨越沟壑的状态进行仿真实验,验证表明了履带平台可翻越的障碍尺寸[7]。
综合上述文献发现,目前大多研究都是针对于常见的关节类机械手,没有针对板材上下料机械手的分析研究。文中采用拉格朗日方程法建立人造板机械手的动力学模型,得到机械手各关节所受力与力矩表达式,之后对其进行动力学仿真分析,得到机械手各运动关节的动态特性曲线,与动力学模型进行对比,验证了动力学模型的准确性,为继续优化机械手结构和提升控制品质的后续研究工作提供了有价值的数据信息[8]。
1 人造板上下料机械手静力学计算分析
1.1 机械手三维结构
人造板上下料机械手由横梁部分、水平移动部分、菱形升降部分、旋转部分、转动伸缩部分5部分构成,能够实现水平移动、升降、旋转以及末端吸盘部分的转动和伸缩5个自由度。整个机械手固装于横梁下,机械三维模型见图1。
横梁部分如图1a所示,由2个相互平行的H型钢构成。水平移动驱动部分如图1b所示,采用齿轮齿条传动方式以及电机减速器驱动方式实现机械手整体的水平移动。升降驱动部分如图1c所示,升降部分置于水平移动部分下方通过上臂连接板与轨道连接板相连,采用链传动方式以及电机减速器驱动方式。旋转部分如图1a所示,由伺服电机驱动使得末端吸盘抓取部分(转动部分、伸缩部分、吸盘组件)整体实现旋转。转动伸缩部分如图1d所示,置于旋转部分下方,采用伺服电机驱动方式以及齿轮传动方式实现转动,伸缩部分采用电缸驱动实现直线伸缩,吸盘组件固装于转动臂和伸缩臂上,利用转动伸缩装置可以灵活控制吸盘间距实现对于不同尺寸板材的抓取问题。
1.2 机械手运动过程分析
文中以全自动直线封边机上料过程为例分析机械手运动过程,其中封边机最大加工长度为 3 000 mm,最大加工厚度为40 mm,进给速率为 1 600 mm/min,考虑到机械手末端吸盘位置,机械手吸取板材尺寸范围为450~2 500 mm。人造板要完成四面封边,完成一面封边后,机械手末端旋转以达到工艺要求,人造板上下料要求传送平稳,能够精确的送到进料台上,生产效率高不低于封边机的生产节拍。
选取人造板标准尺寸2 440 mm×1 220 mm× 18 mm展开以下分析,人造板质量为50 kg,以下分析计算均以此尺寸人造板为准。机械手上料运动过程时间为15 s,具体运动流程见图2。
1.3 机械手静力学计算分析
对机械手进行静力学分析,获得升降部分驱动力和力矩随着机械臂转动角度的变化情况,为动力学分析提供给前提条件。通过求解静力学平衡方程,解出升降关节、、处所受支反力以及驱动力矩关系式,机械手受力分析见图3。
对机械手局部和整体分别列出静力学平衡方程,机械手连杆整体静力学平衡方程如下。
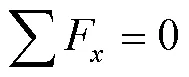

对连杆列静力学平衡方程求解,求解过程如下。




图2 机械手运动过程
图3 机械手受力分析图
式中:为机械手升降臂的长度,其中4个臂长度近似相同,文中为方便计算认为4个臂长度一致,为机械手升降上臂与水平面所成夹角,为机械手升降臂自重,178.75 N,为重力加速度,9.8 N/kg,在文中静力学计算过程中由于转动伸缩部分及旋转部分所受力和力矩较小,故不予进行静力学计算,将此部分简化为一个竖直向下的力0,其中0包括机械手旋转部分、转动伸缩部分自重与人造板重力之和,01 873.5 N。
联立式(1)—(6),得到、、关节的支反力以及驱动力矩的表达式:

在Matlab中输入和驱动力矩M的方程,自变量为机械手升降部分上臂与水平面所成夹角α,α范围为5°~85°,用plot命令分别绘制出如图4所示的、M随α变化的曲线。
2 人造板上下料机械手动力学计算分析
对人造板上下料机械手建模并进行动力学分析,主要是研究上臂与下臂及转动伸缩装置的运行状况及力与力矩之间的关系。机械臂动力学的研究通常为2种,一种是通过机械臂的轨迹运动参数计算各关节需要输出的力或力矩;另一种是已知机械臂每一关节输出的力或力矩通过计算得出机械臂的末端力或力矩[9]。文中采用第一种方法。
2.1 机械手动力学方程求解
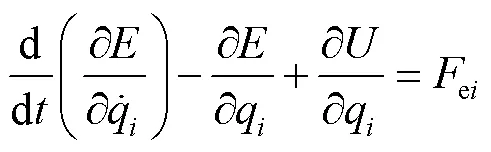
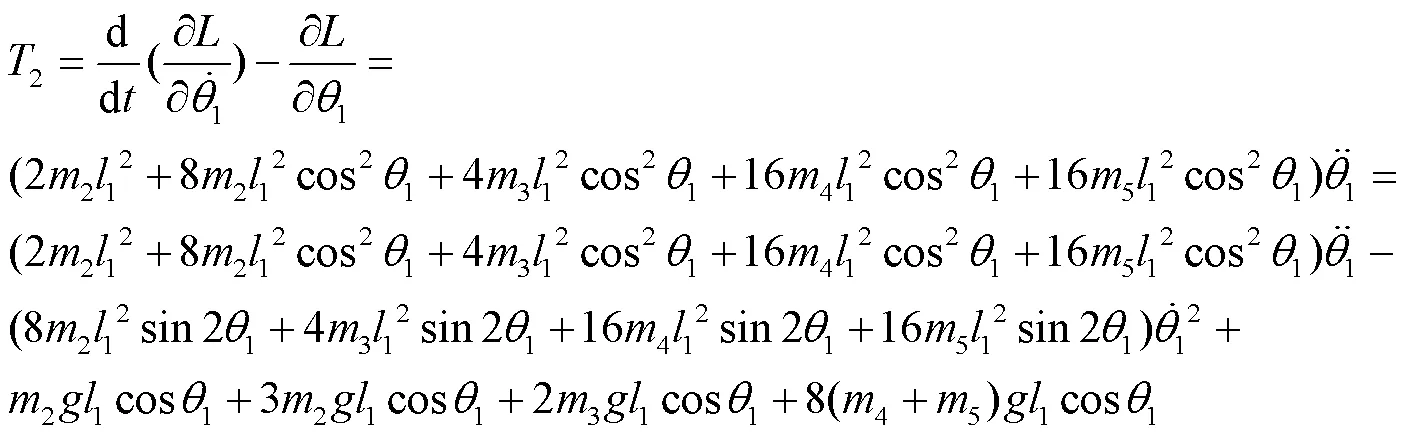
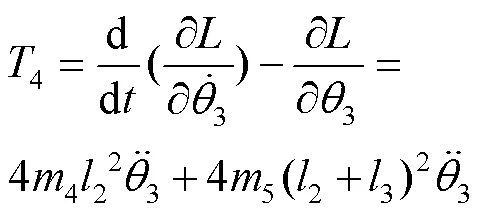
对机构进行动力学分析主要有牛顿–欧拉法和拉格朗日法两种分析理论[10],牛顿–欧拉法主要利用递推方法推算出各个运动关节所受的力和力矩[11],主要用于解决多连杆系统问题,文中的模型由4部分组成,运动方式比较复杂,采用传统的牛顿–欧拉方法建立整个系统的动力学方程比较困难,拉格朗日法基于系统能量的概念,通过系统的动能和势能的关系来求解系统动力学方程,只需要知道各部分的运动规律[12],因此将采用拉格朗日方程法建立整个上下料机械手的动力学模型[13]。利用拉格朗日方程法进行人造板机械手系统的动力学分析,首先应确定系统的广义坐标,然后列出系统的动能、势能和广义力的表达式,带入动力学问题普遍方程(7),即可获得系统的动力学方程,然后对其变量和时间求微分[14]。

首先,分析上下料机械手的如图5所示动力学简化模型。假设机械手的上、下臂、转动伸缩臂为均质杆,各杆件的重心在杆件的中心处,并假设旋转部分、转动伸缩部分重心在各部分中心处。
如图5所示,假设水平移动拖板上面为势能零点记为表面,拖板重心距表面距离为1,上臂管重心距表面距离为2,下臂管重心距表面距离为3,旋转部分重心距表面距离为4,转动伸缩部分重心距表面距离为0,拖板水平移动位移为0,上臂管和下臂管长度均为1,转动伸缩臂初始长度为2,转动伸缩部分可伸缩长度为3,上臂管绕关节点转动关节变量为1,转动臂绕关节点转动变量为3,旋转部分的旋转变量为4,旋转部分长为,宽为,转动伸缩部分近似直径为1。
文中选用基于能量平衡的拉格朗日法进行动力学建模。
2.1.1 系统动能的确定
水平移动拖板的动能为:

式中:为拖板部分质量;为速度;为拖板位移;为拖板速度。
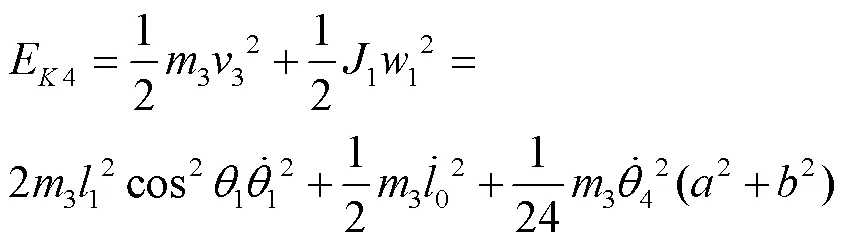
上臂管的动能为:


下臂管的动能为:

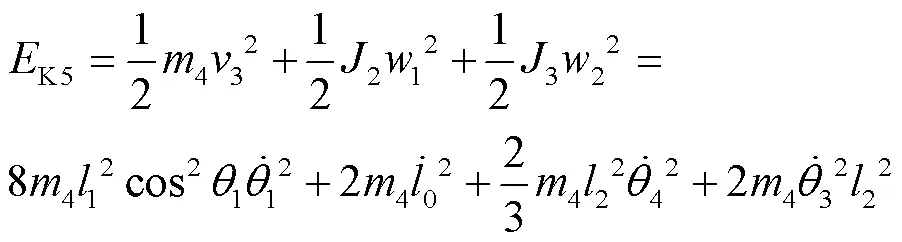
旋转部分的动能为:

转动部分动能为:

伸缩部分动能为:
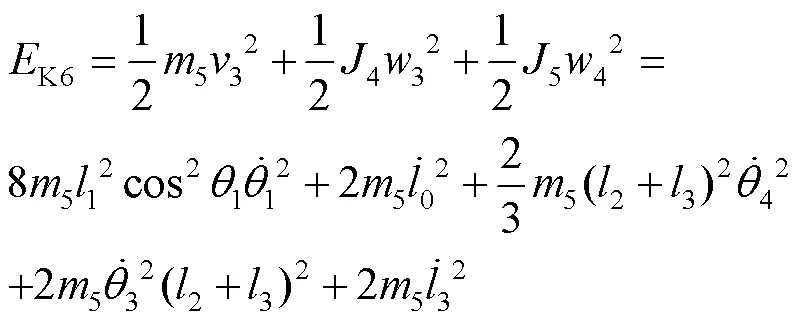
式中:5为伸缩臂质量;3为伸缩臂可伸出的长
2.1.2 系统势能的确定
以拖板表面为零势能面,水平移动拖板的势能为:

式中:为重力加速度;1为拖板重心距表面距离。
上臂管的势能为:

下臂管的势能为:

旋转部分的势能为:

转动伸缩部分的势能为:

2.2 机械手广义力与广义力矩的求解
联立式(7)—(19)可得到各部分广义力与力矩:
水平移动拖板直线运动所收到的力:
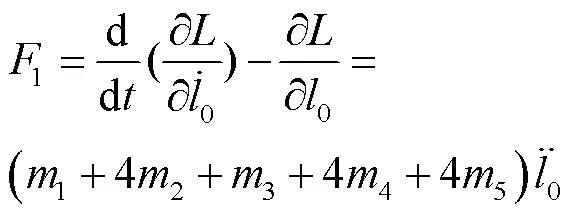
升降臂转动所受到的力矩:
旋转部分旋转所受的力矩:

转动部分转动所受力矩:
伸缩部分所受的力:

由此,得到人造板上下料机械手工作时所需力与力矩的动力学方程。
3 人造板上下料机械手动力学仿真
3.1 仿真模型参数与驱动函数的确定
为了验证动力学模型的正确性及机械手运动构件设计的合理性,利用 Adams 进行人造板上下料机械手的动力学仿真试验,其仿真流程如图2所示。设置仿真初始参数,按照机械手各部分实际材料在Adams中设置材料;机械手三维模型非常复杂,总体包含数百个零件,如果直接将模型导入Adams中计算,将极大的增加仿真模型建立的工作量,故先对三维模型进行简化后导入Adams中[15],简化后的模型见图6。
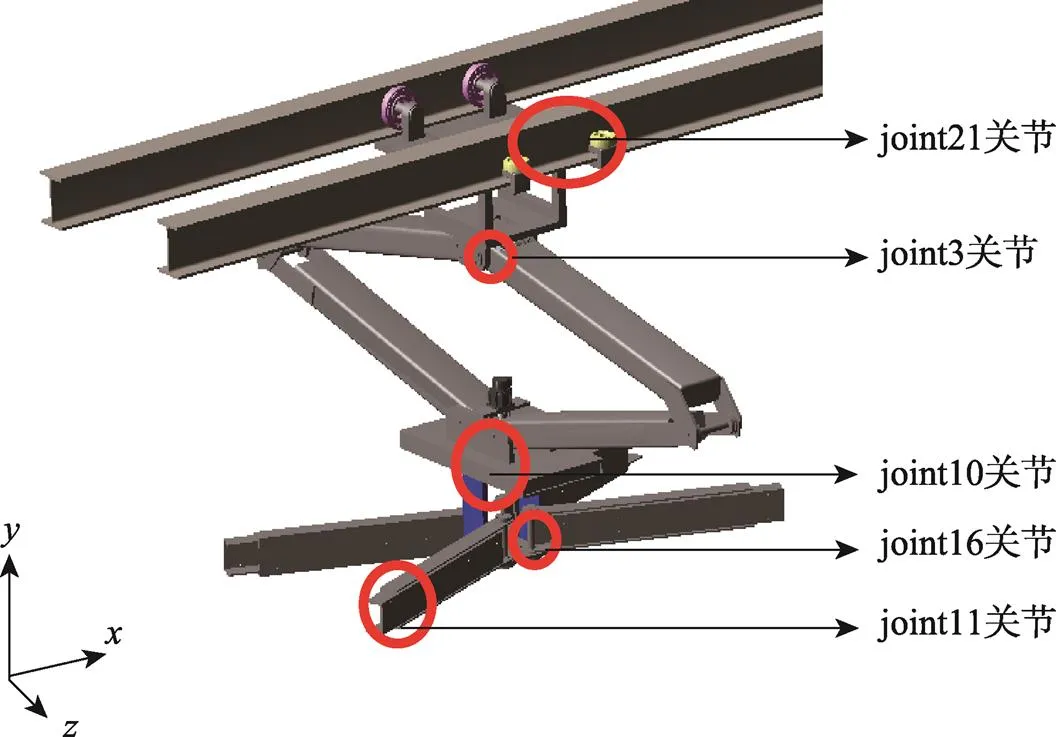
图6 机械手简化模型
图6中joint21对应上述动力学模型中的1,joint3对应2,joint10对应3,joint16对应4,joint11对应2。
Adams仿真模型具体参数:上、下臂长度为983 mm、旋转台长为225 mm、旋转台宽为98 mm、转动臂长为670 mm、伸缩臂长为700 mm、拖板质量为96.6 kg、上下臂质量为18.2 kg、旋转台质量为15.7 kg、转动臂质量为5.7 kg、伸缩臂为5.3 kg。
根据机械手实际运动情况添加符合实际物理规律的拓扑关系,定义各运动部件间的运动副,添加相应约束后还需在相应的约束副上添加相应的驱动和外力。在仿真过程中施加作用于机械手转动伸缩部分竖直向下的力来模拟人造板的重力,其中=500 N。根据图2所示的机械手一个周期内的运动流程图在Adams中设置机械手的step驱动函数,根据输入的step函数绘制一个周期内机械手各关节位移或角位移随时间的变化关系见图7。

图7 一个周期内机械手关节运动规律
3.2 仿真结果与分析
根据已经定义的变量和参数对人造板上下料机械手进行动力学仿真,仿真时间为15 s,仿真步数为500步。仿真得到如图8中机械手工作过程中转动伸缩部分重心的运动轨迹,图中、、分别表示图6中转动伸缩部分重心点各方向坐标。
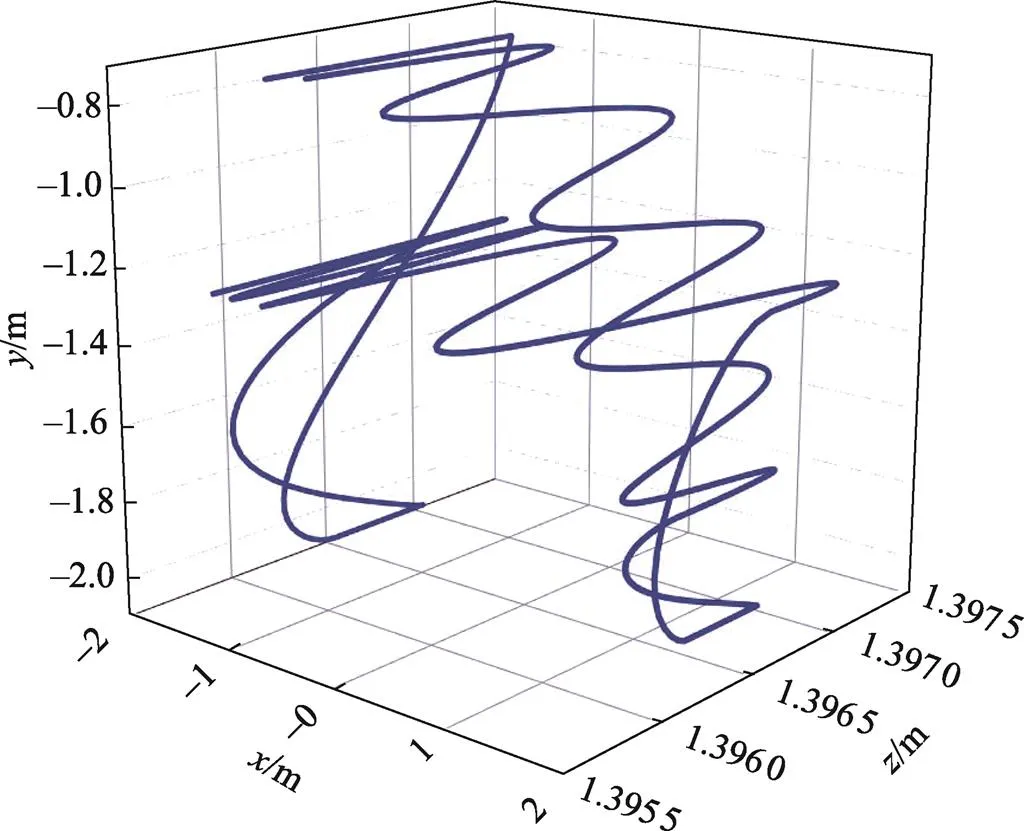
图8 转动伸缩部分重心运动轨迹
仿真测量得到移动关节11、21的速度变化曲线与旋转关节3、16、10的角速度变化曲线见图9。各关节的(角)速度曲线过渡平缓,无速度突变的情况。

图9 机械手各关节(角)速度变化曲线
机械手各关节(角)加速度曲线如图10所示,其中关节21、关节11为加速度随时间的变化曲线,关节3、关节10、关节16为(角)加速度随时间的变化曲线。(角)加速度过渡不平缓,存在突变,是由于驱动电机加速度过大引起的,需要调整机械手运动流程及驱动函数或者对机械手进行结构优化来改善。
机械手各关节受力和力矩变化曲线见图11,动力学模型关节力矩曲线是将上述动力学模型导入Matlab中,输入相应变量数据拟合而成[16]。在动力学建模过程中是将机械手模型简化,并且忽略了关节处的弹簧阻尼作用,所以理论模型存在一定的误差。但由曲线可以看出动力学模型与Adams中实际曲线规律基本一致,数据变化范围在相似区间内,可以认为动力学模型正确。
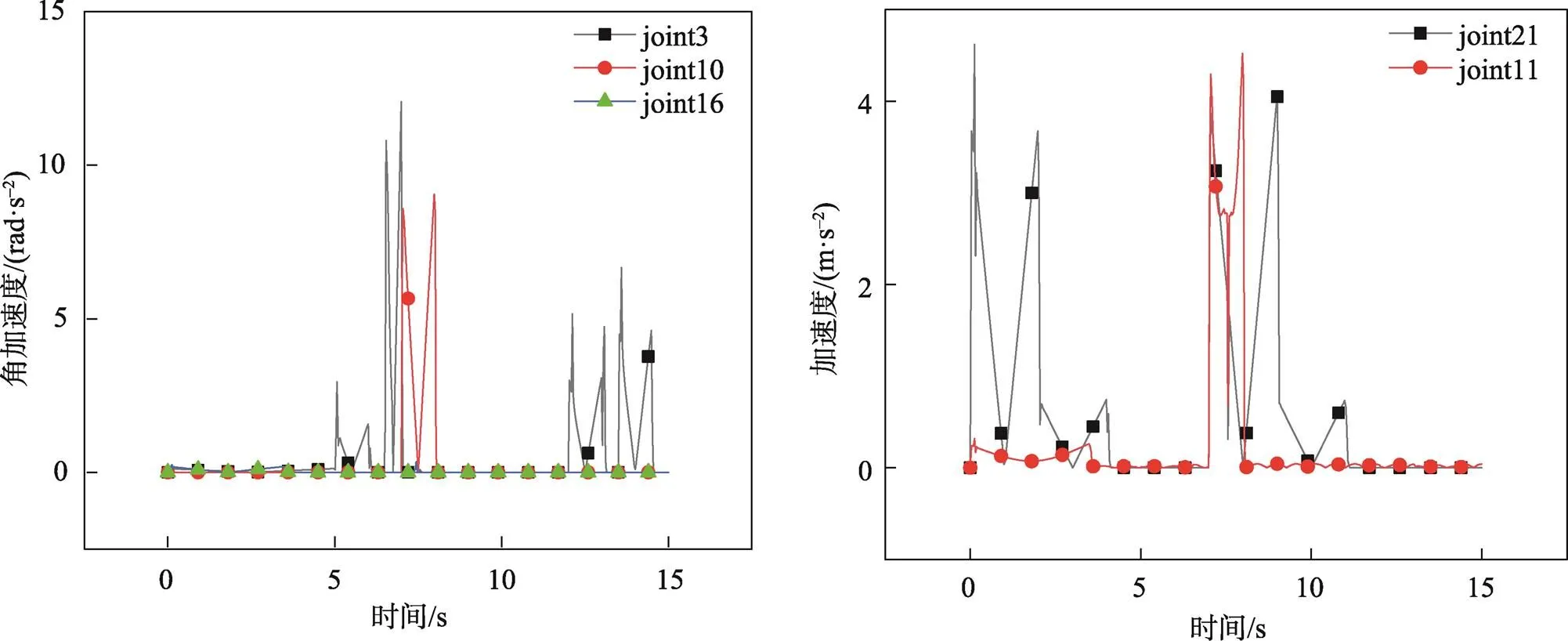
图10 机械手各关节(角)加速度变化曲线
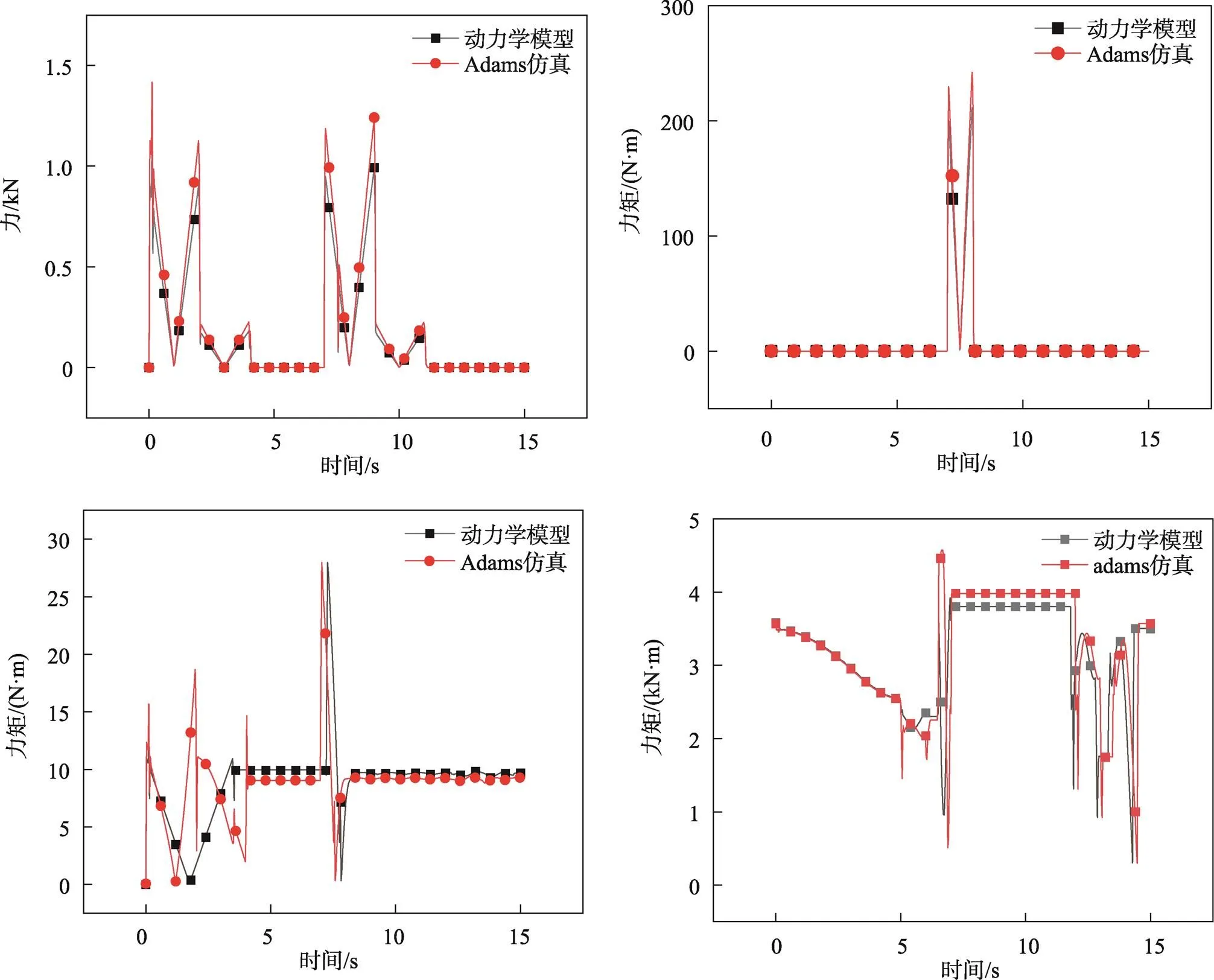
图11 机械手各关节受力与力矩变化曲线
通过分析曲线可知,关节受力与力矩曲线存在多处突变,多处达到峰值,尤其在6.2 s机械手吸取人造板加速上升时joint3和joint10关节受力和力矩突变达到峰值,应适当增加加速时间使机械手加速平缓,并且joint10旋转运动要避免在机械手加速上升时进行,同时也要增加joint10旋转时间。joint21受力在拖板加速时有较大突变,可以适当降低速度。joint16虽然在6.2 s机械手吸取板材时力矩有突变到峰值,但考虑到整体力矩较小,故认为其安全。对于joint11和joint16此类较为安全的关节应适当增加其速度以达到提高效率的目的。对于joint3和joint10后续也可以通过优化结构或改变驱动方式来减小驱动力矩消除力矩突变。
4 结语
1)文中对人造板上下料机械手进行三维建模,说明机械手的结构原理,以封边机的上下料为例阐述机械手的工艺流程。
2)建立机械手的结构计算简图,对机械手进行静力学分析,求解静力学平衡方程,为动力学仿真提供了条件;建立人造板上下料机械手的动力学简图,选用拉格朗日法建立机械手的动力学模型,求解机械手各个运动关节所受到的广义力和力矩。
3)利用Adams对人造板上下料机械手按照一个周期内的运动流程进行动力学仿真分析,按照机械手实际工作原理设置仿真参数和驱动函数。得出机械手吸取部分运动轨迹,测量各关节(角)速度、(角)加速度、受力与力矩的变化曲线。通过对比验证了动力学模型的准确性,为后续对于机械手的驱动优化及结构优化设计提供了重要的理论依据。
[1] 陈敬敬. 板材封边机仿形修边系统的研究与开发[D]. 广州: 广东工业大学, 2014: 10-20.
CHEN Jing-jing. Research and Development of the Copying Trimming System of Edge Banding Machine[D]. Guangzhou: Guangdong University of Technology, 2014: 10-20.
[2] 宁会峰, 鄢志彬, 程荣展, 等. 光伏组件清扫机械臂动力学建模与分析[J]. 太阳能学报, 2020, 41(12): 138-145.
NING Hui-feng, YAN Zhi-bin, CHENG Rong-zhan, et al. Dynamic Modeling and Analysis of Photovoltaic Component Cleaning Manipulator[J]. Acta Energiae Solaris Sinica, 2020, 41(12): 138-145.
[3] 陈亚梅. 基于ADAMS的码垛机器人动力学刚柔耦合分析[J]. 包装工程, 2021, 42(17): 261-265.
CHEN Ya-mei. Rigid-Flexible Coupling Dynamics Analysis of Stacking Robot Based on ADAMS[J]. Packaging Engineering, 2021, 42(17): 261-265.
[4] 程思远, 陈广锋, 王琳霞, 等. 下肢康复外骨骼机器人动力学分析及仿真[J]. 东华大学学报(自然科学版), 2019, 45(6): 899-905.
CHENG Si-yuan, CHEN Guang-feng, WANG Lin-xia, et al. Dynamics Analysis and Simulation of Lower Limb Rehabilitative Exoskeleton Robot[J]. Journal of Donghua University (Natural Science), 2019, 45(6): 899-905.
[5] 程亚兵, 陈璐翔, 葛平玉, 等. 双相正时套筒链的动力学仿真分析及磨损失效[J]. 吉林大学学报(工学版), 2022, 52(4): 781-788.
CHENG Ya-bing, CHEN Lu-xiang, GE Ping-yu, et al. Dynamic Simulation Analysis and Wear Failure of Dual-Phase Timing Bush Chain[J]. Journal of Jilin University (Engineering and Technology Edition), 2022, 52(4): 781-788.
[6] XIN Zhu zhen, XIN Zhu Jian, MEI Kang hui, et al. Dynamic Modelling of 2-DOF Luffing Mechanism with Serial Closed Kinematic Chains[J]. Journal of Central South University, 2021, 28(1): 168-178.
[7] 刘泽新, 王希贵, 林文树. 基于Adams的森林防火机器人履带平台设计与动力学仿真[J]. 森林工程, 2021, 37(5): 65-74.
LIU Ze-xin, WANG Xi-gui, LIN Wen-shu. Design and Dynamic Simulation of Crawler Platform for Forest Fire Fighting Robot Based on Adams[J]. Forest Engineering, 2021, 37(5): 65-74.
[8] 周会成, 任正军. 六轴机器人设计及动力学分析[J]. 机床与液压, 2014, 42(9): 1-5.
ZHOU Hui-cheng, REN Zheng-jun. Mechanical Design and Dynamic Analysis of Six-DOF Robot[J]. Machine Tool & Hydraulics, 2014, 42(9): 1-5.
[9] 高欣, 杜明涛, 吴昊鑫, 等. 考虑在轨运动可靠性的空间机械臂关节力矩优化方法[J]. 宇航学报, 2016, 37(7): 784-794.
GAO Xin, DU Ming-tao, WU Hao-xin, et al. A Joint Torque Optimization Method for Space Manipulators Considering the In-Orbit Motion Reliability[J]. Journal of Astronautics, 2016, 37(7): 784-794.
[10] 李传龙. 基于虚拟样机技术的4–DOF混联码垛机器人运动学和动力学的研究及参数优化[D]. 南京: 南京理工大学, 2012: 23-34.
LI Chuan-long. Research on Kinematics and Dynamics of 4-DOF Hybrid Palletizing Robot Based on Virtual Prototype Technology and Parameter Optimization[D]. Nanjing: Nanjing University of Science and Technology, 2012: 23-34.
[11] 陶胤强. 基于ADAMS的六轴机器人动力学仿真分析[J]. 包装工程, 2021, 42(17): 266-269.
TAO Yin-qiang. Dynamics Simulation Analysis of Six-Axis Robot Based on ADAMS[J]. Packaging Engineering, 2021, 42(17): 266-269.
[12] 郗鹏宇. 下肢外骨骼机器人的结构设计与仿真分析[D]. 天津: 天津理工大学, 2021: 45.
XI Peng-yu. Mechanical Design and Simulation Analysis for a Lower Exoskeleton Robot[D]. Tianjin: Tianjin University of Technology, 2021: 45.
[13] 张建华, 许晓林, 刘璇, 等. 双臂协调机器人相对动力学建模[J]. 机械工程学报, 2019, 55(3): 34-42.
ZHANG Jian-hua, XU Xiao-lin, LIU Xuan, et al. Relative Dynamic Modeling of Dual-Arm Coordination Robot[J]. Journal of Mechanical Engineering, 2019, 55(3): 34-42.
[14] 王光勇. 轮式移动机械臂的轨迹跟踪控制方法研究[D]. 长春: 吉林大学, 2017: 11—15.
WANG Guang-yong. Research on Wheel Mobile Manipulator Trajectory Tracking Control[D]. Changchun: Jilin University, 2017: 11-15.
[15] 刘超龙. 高速桁架机器人的力学分析及结构优化[D]. 南京: 南京航空航天大学, 2017: 14.
LIU Chao-long. Mechanical Analysis and Structural Optimization of High Speed Truss Robot[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2017: 14.
[16] 翟敬梅, 康博, 张铁. 六自由度喷涂机器人动力学分析及仿真[J]. 机械设计与制造, 2012(1): 169-171.
ZHAI Jing-mei, KANG Bo, ZHANG Tie. Dynamics Analysis and Simulation for 6-DOF Spraying Robots[J]. Machinery Design & Manufacture, 2012(1): 169-171.
Dynamic Analysis and Simulation of Loading and Unloading Manipulator for Wood-based Panel
SUN Rui, XUE Bo,WANG Xin,YANG Chun-mei,SONG Wen-long
(Northeast Forestry University, Harbin 150006, China)
The work aims to realize the automatic handling operation of packaging production line, comprehensively and systematically understand the dynamic characteristics of loading and unloading manipulator for wood-based panel, and explore the driving force and variation law of each joint of the manipulator. A three-dimensional structure model for loading and unloading of wood-based panel was established. The motion process of the manipulator in one cycle was formulated. The manipulator was modeled by Lagrange equation method, the dynamic characteristics of the manipulator were simulated by system dynamics simulation software (Adams), and the accuracy of the dynamic model was verified. The change curves of (angular) velocity, (angular) acceleration, force and torque of each joint of the manipulator were obtained. The change of (angular) velocity was gentle without sudden change, and the curve of (angular) acceleration, force and torque changed sharply in 6 s-9 s. The simulation curve basically fitted the dynamic model data. The dynamic model is established correctly, and the subsequent driving or structural optimization should be used to make the whole movement process more stable.
loading and unloading manipulator of wood based panel; static analysis; Lagrange equation method; dynamic analysis; ADAMS simulation.
TH132.4
A
1001-3563(2022)17-0130-10
10.19554/j.cnki.1001-3563.2022.17.017
2021–10–13
黑龙江省应用技术研究与开发计划项目(GA19A402);中央高校基本科研业务费专项资金项目(2572020DR12);2021年度中央高校基本科研业务费青年教师创新项目计划项目(41421022)
孙锐(1997—),男,硕士生,主攻木工机械设计。
宋文龙(1973—),男,博士,教授,主要研究方向为模式识别与智能系统。
责任编辑:曾钰婵
猜你喜欢
青少年科技博览(中学版)(2023年5期)2023-06-26 09:39:12
新天地(2020年7期)2020-08-04 09:18:33
特别文摘(2018年10期)2018-12-24 10:03:04
制造技术与机床(2017年11期)2017-12-18 06:46:41
国际木业(2016年8期)2017-01-15 13:55:21
国际木业(2016年12期)2016-12-21 03:13:28
国际木业(2016年3期)2016-12-01 05:04:51
国际木业(2016年1期)2016-12-01 05:04:09
通信电源技术(2016年1期)2016-04-16 04:57:29
机电信息(2015年3期)2015-02-27 15:54:53
