
面向大型构件印刷的并联驱动双向转动机械臂运动学分析
2022-09-21 11:30:38宁峰平李瑞琴张磊王远
包装工程 2022年17期
宁峰平,李瑞琴,张磊,王远
工艺与装备
面向大型构件印刷的并联驱动双向转动机械臂运动学分析
宁峰平1,2,李瑞琴1,2,张磊1,2,王远1,2
(1.中北大学 机械工程,太原 030051;2.先进制造技术山西省重点实验室,太原 030051)
为实现工作臂末端到达平面或曲面内特定位置,提出一种应用于大型构件印刷的2–UCU/U并联驱动双向转动机械臂。应用螺旋理论分析2–UCU/U机构的约束螺旋系,得出该机构的自由度,验证输入选取的合理性。利用封闭矢量法,求解得出机构的位置反解,建立速度雅可比矩阵。使用搜索法,借助Matlab求得机构的工作空间,分析机构输入与输出运动关系。求解得到2–UCU/U并联驱动双向转动机械臂的工作空间,其形状为球形曲面;分析表明,该机构的运动为俯仰和偏航2个方向的转动。驱动副的同向运动实现工作臂的仰俯运动,驱动副的反向运动实现工作臂的偏航运动,因此可使工作臂末端到达工作面所需位置,最终可使连于工作臂末端的工具在特定位置工作。
机械臂;并联驱动;双向转动;工作空间;运动学;大型构件印刷
双向转动机械臂通过2个转动,可以实现工作臂末端到达工作面内所需的位置,实现精准定位。与传统的串联机械臂相比,并联驱动机械臂具有刚度大、精度高、承载能力强,无累计误差等优点。在承载能力要求高的场所,并联驱动机械臂应用越来越多,如包装生产线上印刷[1]、雕刻[2]、码垛[3]等,以及高空作业平台[4]、船舶纵横摇摆模拟器[5]等。在大型构件表面进行印刷、喷涂、雕刻等工作,诸如机翼、船坞等大型构件的表面印刷,对定位精度、误差累计的要求高,同时对机械臂的刚度和承载能力也有较高的要求,因此构建一种并联驱动机械臂具有广泛的应用前景。
国外学者对并联驱动机构运动学、动力学、控制参数调整、优化设计等进行了大量研究。Fabritius等[6]提出一种绳索并联驱动平台工作空间的计算方法,并根据计算时间评估其性能。Stojanovic等[7]对一种具有3个平移自由度并联机床进行了运动学分析,并研究了工作空间内机构的灵巧度。Monsarrat等[8]对六自由度空间平行平台机构进行了工作空间分析和优化。Bai等[9]回顾了具有新兴应用的球面并联机械臂的运动学、动力学、设计优化和新型球面机构的最新技术。Nedic等[10]研究了并联机器人负载力控制器的优化调整。
国内学者也对并联驱动机构进行机构设计、工作空间、性能优化等进行了研究。李永泉等[11]应用图谱法提出一种3平移并联机构构型综合方法。陈纯等[12]提出一种并联驱动的绕、轴双向转动平台,并对其动力学进行了分析。张金柱等[13]针对三自由度并联驱动机械腿机构,进行了运动学、静力学分析,对其性能指标及几何参数进行了优选。Wang等[14]提出了一种建模方法和精确的数值程序来模拟多缆驱动并联悬挂平台系统的动态响应。荣誉等[15]提出了一种变胞的超冗余并联机械臂,对机械臂进行了误差建模与分析。金振林等[16]提出了一种四自由度并联机械臂,并研究了该机构的位置正、反解。姚建涛等[17]研究了基座运动对并联调整机构动力学性能的影响。
目前,关于大型构件的表面的印刷、喷涂、雕刻的机械臂研究相对较少,现有的研究主要集中于串联机械臂[18-19],并联驱动机构在此领域研究较少。针对在大型构件表面特定区域精准定位、印刷、雕刻等问题,文中提出一种2–UCU/U并联驱动双向转动机械臂,通过螺旋理论和改进的K–G公式求解该机构的自由度,选取并联驱动并对驱动选取的合理性进行验证。对2–UCU/U并联驱动双向转动机械臂进行运动学分析和数值验证。
1 并联驱动双向转动机械臂构型
2–UCU/U并联驱动双向转动机械臂由工作臂、2条并联驱动支链UCU组成,其中U表示万向铰,C表示圆柱副,见图1。并联驱动支链下端通过U副与静平台连接,上端通过U副与工作臂连接,中间部位为C副,2条UCU支链对称布置在工作臂的两侧;工作臂通过U副与静平台连接,其末端连接加工工具;右驱动支链、左驱动支链与工作臂形成三角形布置形式。
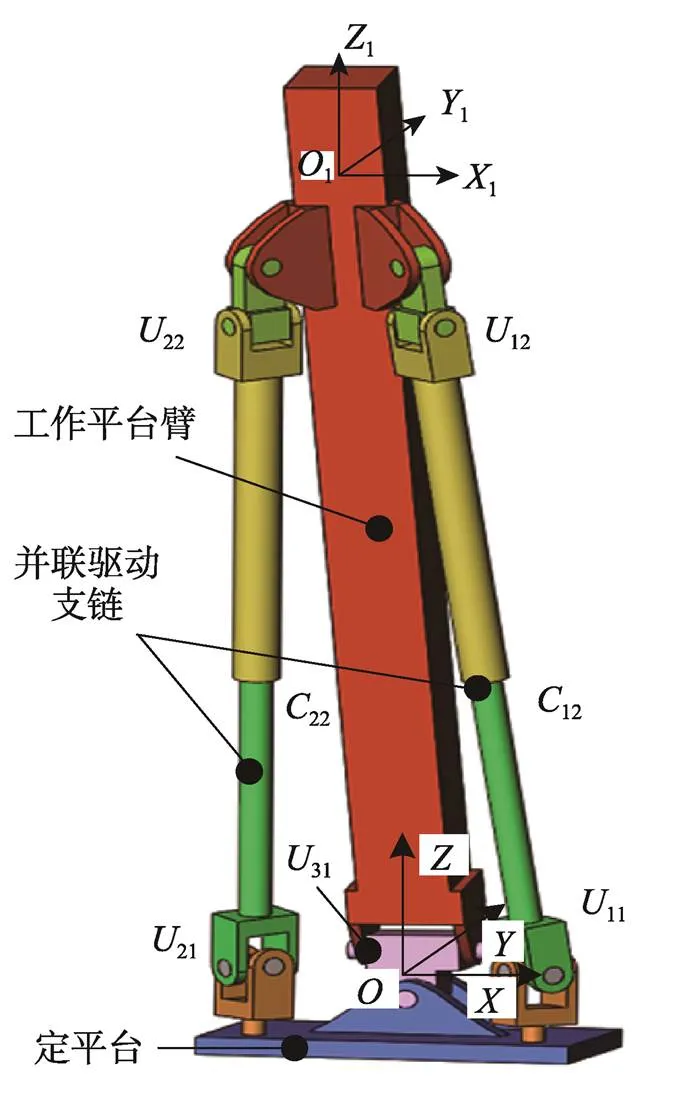
图1 并联驱动双向转动机械臂
2 2-UCU/U机构自由度及其输入合理性
2.1 自由度分析
为分析2–UCU/U并联驱动双向转动机械臂的自由度,分别取出其中驱动支链和工作臂支链。驱动支链坐标系建立如图2a所示,轴和轴分别沿与静平台连接的U副的轴线,轴垂直于U副轴线的平面。工作臂的坐标系建立如图2b所示,在工作臂的U副建立静坐标系–,原点与U副中心重合,、轴分别与U副轴线重合。动坐标系1–111建立在工作臂上端,其1轴沿工作臂的中心线,111平面在初始时刻与并联驱动支链上端2个U副共面。
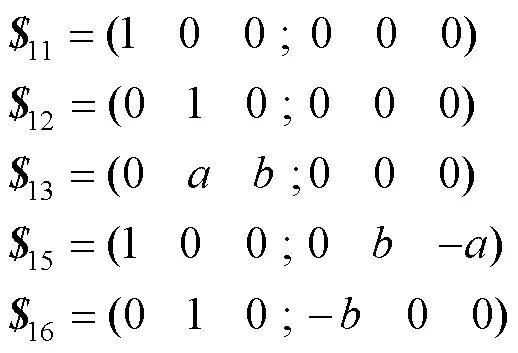
则驱动支链1的运动螺旋系为:
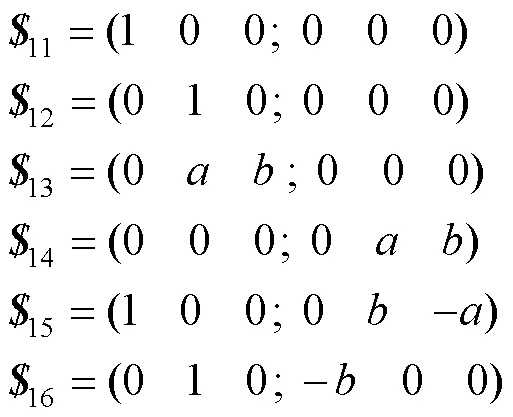
式中:、为驱动支链上端U副中心的1、1坐标。
式(1)中包含6个运动螺旋,极易判断出该运动螺旋系不存在反螺旋,也就是该驱动支链对工作臂不提供约束。同理驱动支链对工作臂也不提供约束。
工作臂的运动螺旋系为
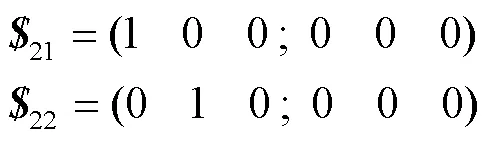
计算式(2)中2个运动螺旋的反螺旋,由于所有螺旋坐标中的后4个元素均为0,可以得到该机械臂的约束螺旋系为:
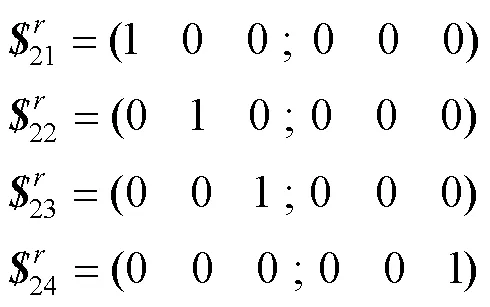
式(3)表明,工作臂支链的U副对工作臂施加了4个约束,分别是3个方向的约束力和垂直U副平面的约束力偶。
综合上述分析,工作臂共承受4个约束反螺旋,包括3个约束力和1个约束力偶。由于这4个约束反螺旋线性无关,则该机构的冗余约束数=0。由改进的K–G公式[20],该机构的自由度为:
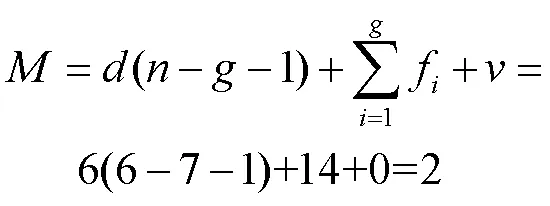
式中:d为机构的阶数;n为机构的杆件数;g为机构铰链数;fi为铰链的自由度数。
由此得出,2–UCU/U并联驱动双向转动机械臂的自由度是2。依据上述分析,3个分支作用3个约束力和1个约束力偶于工作臂,3个约束力在空间汇交于一点,也就是约束了工作臂沿、和轴的移动,约束力偶的方向竖直向上,约束了工作臂绕轴的转动。机构的工作臂则还有绕、轴线转动的2个自由度,也就是绕双向转动工作臂下端U副的2个轴线的转动。由于机构在转动过程中,驱动支链和工作臂的运动螺旋系不会改变,相应的反螺旋系不会改变,作用于工作臂的约束依旧是3个约束力和1个约束力偶。由此可知,该机构的双向转动自由度是全周性的。
2.2 输入的选取
为分析2–UCU/U并联驱动双向转动机械臂的输入的合理性,这里需要分别分析机构的3个分支的螺旋系。其中工作臂相当于并联机构的动平台;UCU支链为驱动支链,其中C副选为驱动副,控制C副的移动实现驱动输入。在C副的移动被锁定后,驱动支链还有3个运动副,其运动螺旋系为
它有1个反螺旋为:

在第1条驱动支链中的反螺旋是约束力,沿杆件方向。同理,另一条驱动支链的反螺旋也是约束力,沿驱动支链2的杆件方向。由于工作臂支链中没有驱动副,则其运动螺旋系和约束螺旋系分别同式(2)和式(3)。
综上所述,3条支链总共作用于工作臂的约束数为6个,其中有5个约束为线矢力,1个约束为约束力偶。工作臂支链的提供的约束力在该支链U副中心空间汇交,两条驱动支链提供的约束力和沿工作臂支链的中约束力在工作臂上端汇交,Grassmann线几何原理得到这里的5个约束线矢力是独立的线性无关。由于不存在平行约束线矢力,且与约束力偶垂直,则约束力偶与这5个约束线矢力也线性无关。这样,作用于工作臂的6个约束是独立的线性无关,即这6个约束螺旋系的秩为6。这说明选取这两条UCU支链为驱动支链,且选取其中C副中移动副为驱动副是合理的。
3 2-UCU/U机构的运动学分析
3.1 位置反解
并联驱动双向转动机械臂的位置反解是已知工作臂绕静坐标系–的转角和,求解并联驱动支链中输入位移1、2。位置反解的目的是对机构进行工作空间求解,并对预期运动实现精确控制。
为了描述机构姿态特征,采用––欧拉角描述,即工作臂绕静坐标系、、轴的转角和来描述。由于2–UCU/U机构是双向转动机构,只能绕静坐标系、轴转动,没有绕轴转动,其姿态是绕静坐标系、轴的转动角度分别为和,而绕轴转动角度=0。由此可知,工作臂的姿态矩阵为
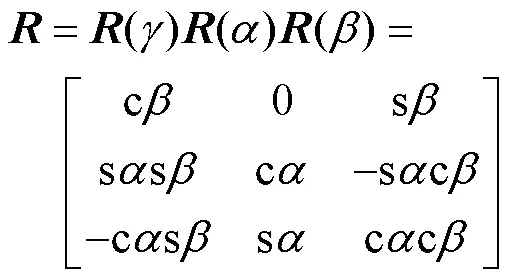
式中:c、s分别为三角函数sin、cos的简写。
为了研究输入和输出的关系,建立静坐标系原点、动坐标系原点1以及驱动支链两端U副中心U1和U2的闭环矢量图,见图3。
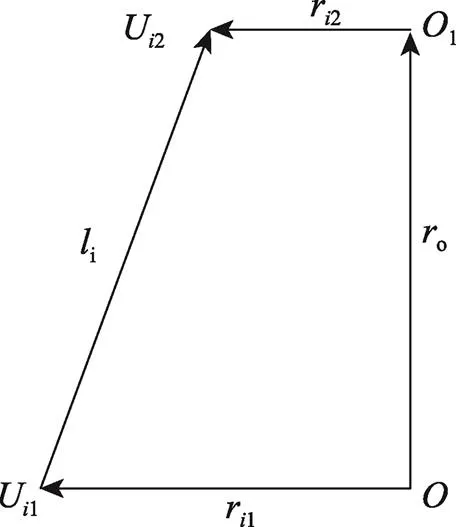
图3 闭环矢量图
由图3可知:
式中:1为定常矢量;o和2为随动平台运动的变矢量,是驱动支链的编号,=1, 2。

联立式(7)—(10)可得:
式(11)表明输出转角和与并联驱动支链中输入位移1、2之间的关系,即该机构的位置反解。
3.2 速度雅可比矩阵
为研究并联驱动链的输入速度与工作臂的输出速度之间的关系,这里引进速度雅可比矩阵。将式(7)、(9)、(10)代入式(8)中,整理可得:

对式(12)求导,可得:

式中:()为角速度算子。
由于工作臂只有绕、轴的转动,则此时的()为:
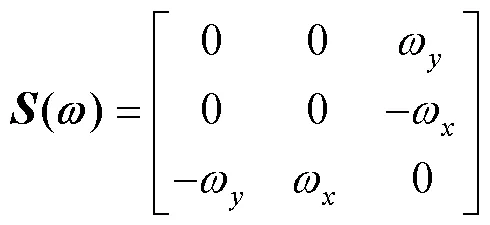
式中:ω和ω为绕、轴的角速度。
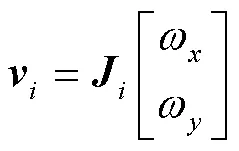
式中:
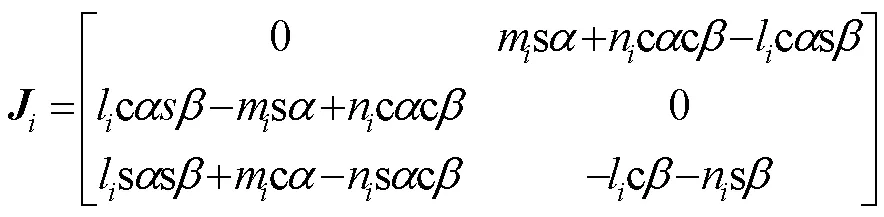
2–UCU/U机构输入速度和输出速度分别为:
联合式(13)—(18)可知:
速度雅克比矩阵的定义为:机构的输入速度与输出速度的线性变换。结合式(18)可知,该机构的速度雅可比矩阵为:
4 2-UCU/U机构的运动学分析
4.1 工作空间分析
工作空间为该机构在驱动和结构限制条件下,工作臂末端所能到达的空间位置的集合。以机翼表面印刷为例,2–UCU/U机构的结构参数见表1。
表1 2–UCU/U机构的结构参数
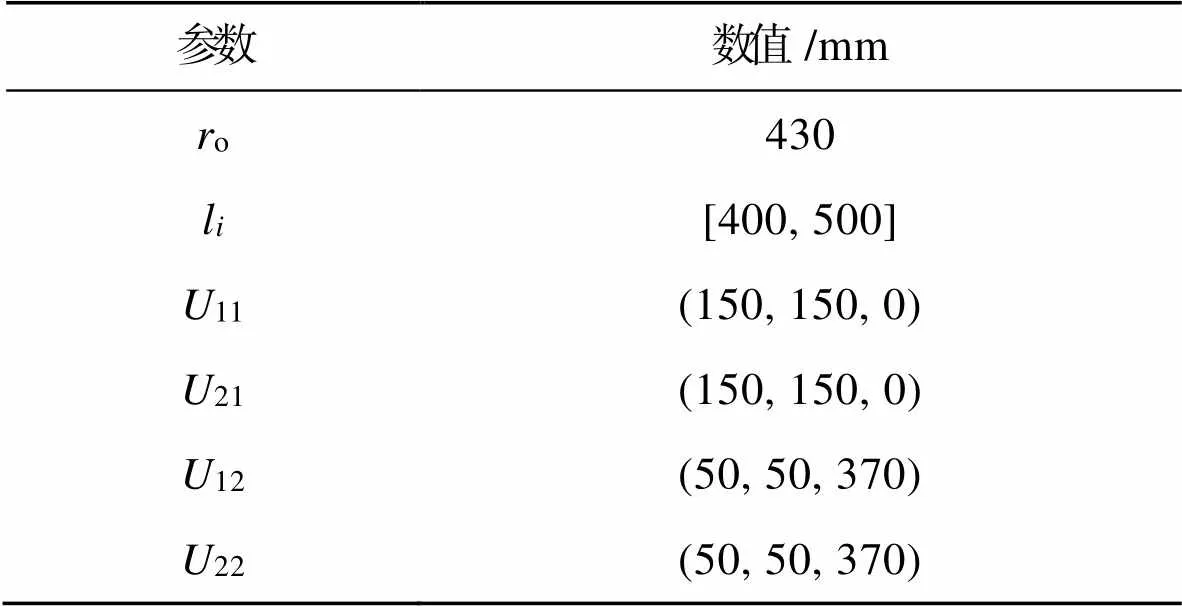
Tab.1 Structural parameters of 2-UCU/U mechanism
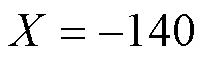
由于该机构是双向转动机构,不存在移动自由度,故该工作空间是灵活工作空间。同时,由于该机构采用了2条UCU并联驱动支链,与串联驱动的关节型机械臂相比,其工作空间减小,但其承载能力和工作精度提高,累积误差降低。
4.2 输入与输出特性
分析机构的驱动输入与双向转动输出的运动特性,得到驱动l的变化规律如图5、图6所示。由图5可知,工作臂在平面内时,要实现其绕轴的俯仰运动,并联驱动支链的输入位移相同,即1=2,可实现绕的俯仰角度范围为[0°, 50°]。由图6可知,要实现工作臂绕轴的偏航运动,2个并联驱动的位移运动恰好相反,即一个驱动杆伸长,另一个驱动杆缩短。由此可知,2–UCU/U机构中工作臂的双向摆动是通过2个驱动副的同向位移运动和反向位移运动实现的
4.3 大型构件印刷应用分析
在大型构件表面的特定区域进行定位、印刷、喷涂、雕刻等工作,对工作臂末端重复定位精度要求较高,常见的需要印刷大型构件诸如:机翼、航天器、轮船等。2–UCU/U并联驱动双向转动机械臂具有并联机构的刚度高、承载能力大、误差累计小等优点,可以满足工作要求。为了适应不同大型构件的印刷,2–UCU/U机构一般安装于水平移动平台上,可以有效提高机械臂的工作空间,提高该机构的适用范围。该机构采用2条UCU并联驱动支链,通过控制控制两个驱动可以实现工作臂的双向转动。与其他多驱动机构相比,2–UCU/U机构的运动控制是简单的。针对大构件表面印刷问题,以机翼表面印刷文字为例,对机构应用进行了分析,见图7。综上分析,2–UCU/U并联驱动双向转动机械臂具有广泛的应用前景。
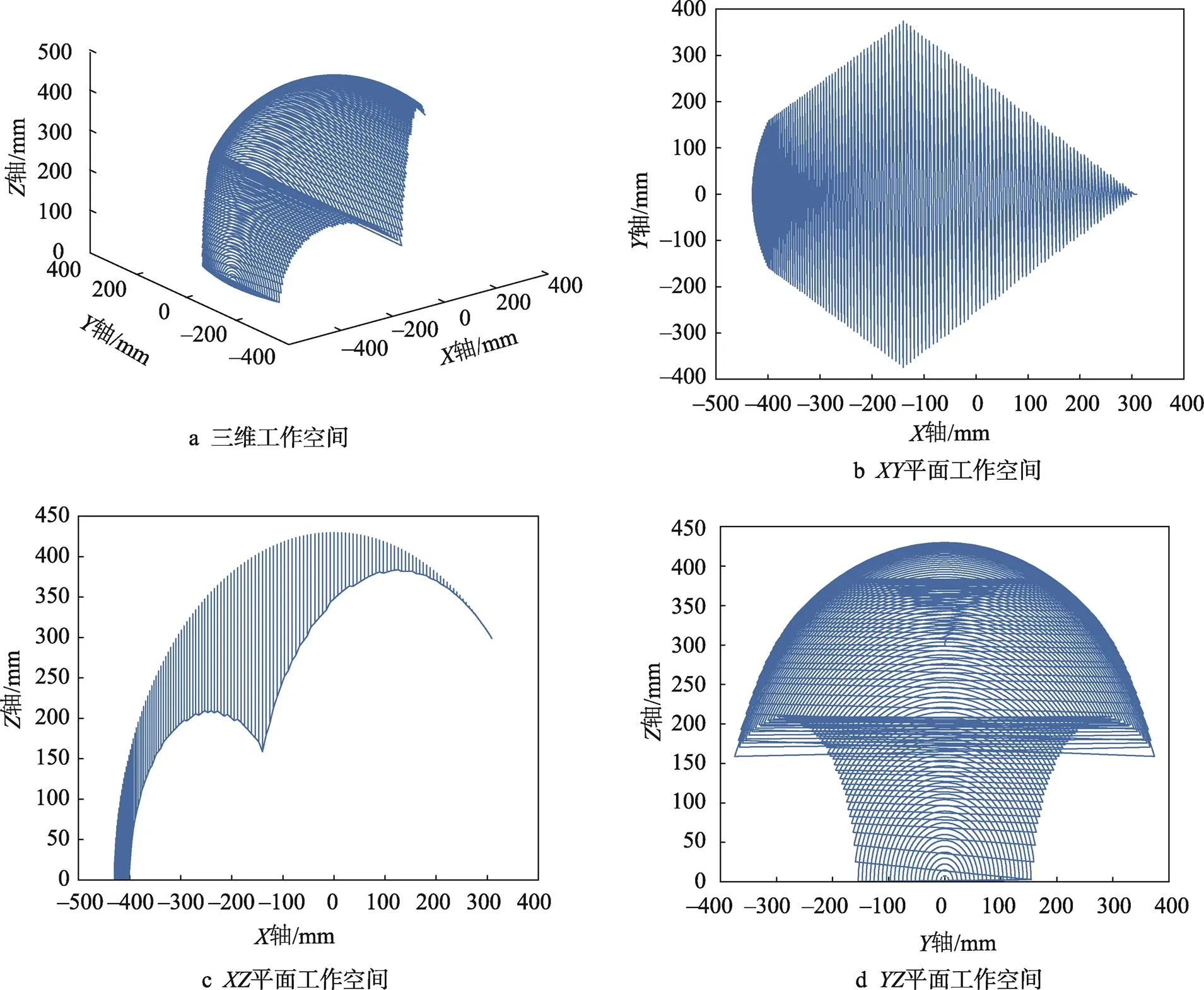
图4 工作空间
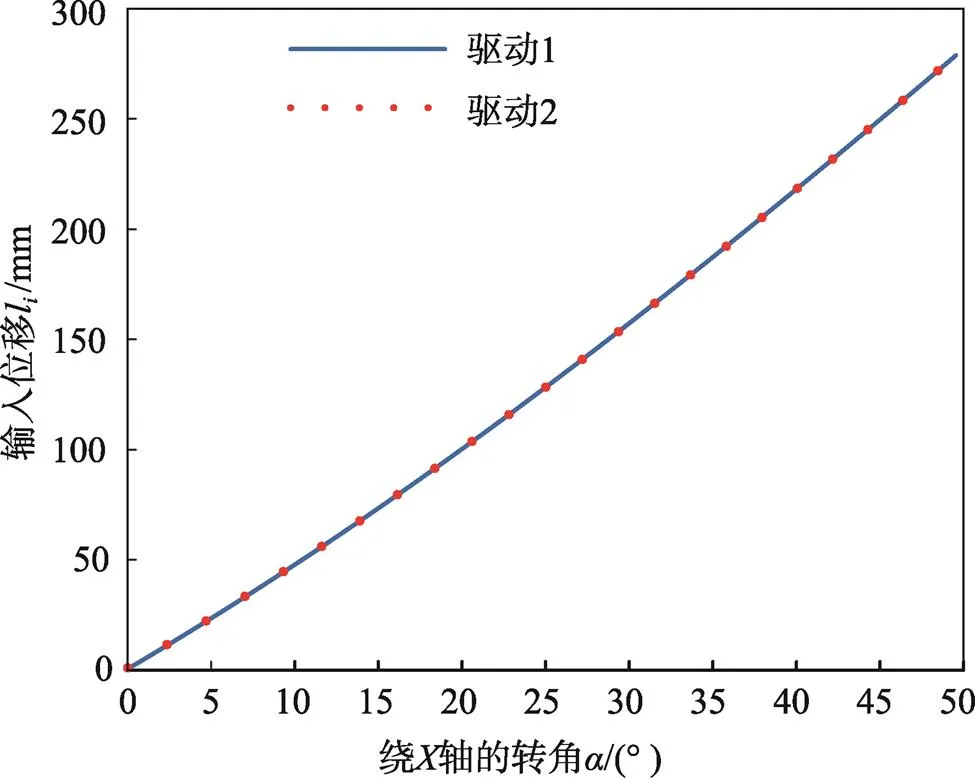
图5 驱动li随α的变化曲线
图6 驱动l随的变化曲线
Fig.6 Variation curve of drivinglwith
图7 大型机翼印刷
5 结语
提出了一种适用于大型构件印刷的2–UCU/U并联驱动双向转动机械臂,应用螺旋理论分析了该机构是一双向转动的2自由度机构,并验证了选取并联驱动支链中C副的移动作为驱动输入的合理性。建立了该机构的运动学模型,给出了反解的表达式,得到了理论上的工作空间。分析得出速度雅可比矩阵,得到输入与输出的特性曲线,并得知驱动副的同向移动实现工作臂仰俯运动,驱动副的反向移动实现工作臂偏航运动。该机构能够使工作臂达到工作面内所需的位置,能在相应工作面的特定位置进行工作,特别是在大型构件印刷领域有良好的应用前景。
[1] 孔一啸, 田宝俊, 李瑞琴. 基于2-CPR/UPS三平移并联机构的移印机运动学分析[J]. 包装工程, 2021, 42(3): 207-213.
KONG Yi-xiao, TIAN Bao-jun, LI Rui-qin. Kinematics Analysis of Pad Printing Machine Based on 2-CPR/UPS Three-Translation Parallel Mechanism[J]. Packaging Engineering, 2021, 42(3): 207-213.
[2] 马世豪, 李瑞琴, 宁峰平, 等. 2-SPR/RUPR并联机构的逆运动学与可达工作空间分析[J]. 包装工程, 2019, 40(9): 142-147.
MA Shi-hao, LI Rui-qin, NING Feng-ping, et al. Inverse Kinematics and Reachable Workspace Analysis of 2-SPR/RUPR Parallel Mechanism[J]. Packaging Engineering, 2019, 40(9): 142-147.
[3] 米文博, 马春生, 李瑞琴, 等. 应用于药品包装生产线的2-UPR/RSPR并联机构的工作空间分析[J]. 包装工程, 2021, 42(3): 171-176.
MI Wen-bo, MA Chun-sheng, LI Rui-qin, et al. Workspace of 2-UPR/RSPR Parallel Mechanism Applied to Medicine Packaging Production Line[J]. Packaging Engineering, 2021, 42(3): 171-176.
[4] 王豪, 纪爱敏, 张磊, 等. 高空作业平台臂架变幅振动特性研究[J]. 振动与冲击, 2020, 39(8): 40-46.
WANG Hao, JI Ai-min, ZHANG Lei, et al. Vibration Behaviors of the Boom Luffing of Aerial Work Platform[J]. Journal of Vibration and Shock, 2020, 39(8): 40-46.
[5] 林泽琦, 黄凯, 郑映仪, 等. 两自由度4-UPS/U并联机构位置逆解分析[J]. 东莞理工学院学报, 2021, 28(3): 100-106.
LIN Ze-qi, HUANG Kai, ZHENG Ying-yi, et al. Analysis of Inverse Position of UPS/U Parallel Mechanism with Two DOFs[J]. Journal of Dongguan University of Technology, 2021, 28(3): 100-106.
[6] FABRITIUS M, MARTIN C, POTT A. Calculation of the Cable-Platform Collision-Free Total Orientation Workspace of Cable-Driven Parallel Robots[C]// International Conference on Cable-Driven Parallel Robots, Springer, Cham, 2019: 137-148.
[7] STOJANOVIC V, NEDIC N. A Nature Inspired Parameter Tuning Approach to Cascade Control for Hydraulically Driven Parallel Robot Platform[J]. Journal of Optimization Theory and Applications, 2016, 168(1): 332-347.
[8] MONSARRAT B, GOSSELIN C M. Workspace Analysis and Optimal Design of a 3-Leg 6-DOF Parallel Platform Mechanism[J]. IEEE Transactions on Robotics and Automation, 2003, 19(6): 954-966.
[9] BAI S, LI X, ANGELES J. A Review of Spherical Motion Generation Using Either Spherical Parallel Manipulators or Spherical Motors[J]. Mechanism and Machine Theory, 2019, 140: 377-388.
[10] NEDIC N, STOJANOVIC V, DJORDJEVIC V. Optimal Control of Hydraulically Driven Parallel Robot Platform Based on Firefly Algorithm[J]. Nonlinear Dynamics, 2015, 82(3): 1457-1473.
[11] 李永泉, 江洪生, 郑天宇, 等. 基于图谱法的3平移并联机构型综合[J]. 机械工程学报, 2021, 57(23): 34-46.
LI Yong-quan, JIANG Hong-sheng, ZHENG Tian-yu, et al. Type Synthesis of 3-translation Parallel Mechanism Based on Graphical Approach[J]. Journal of Mechanical Engineering, 2021, 57(23): 34-46.
[12] 陈纯, 徐永帅, 王佳伟, 等. 并联驱动双向偏转平台设计与动力学分析[J]. 农业机械学报, 2019, 50(5): 420-426.
CHEN Chun, XU Yong-shuai, WANG Jia-wei, et al. Design and Dynamic Analysis of Novel Parallel Bidirectional Deflection Platform[J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(5): 420-426.
[13] 张金柱, 金振林, 张天浩. 并联驱动机械腿运动学静力学性能评价及几何参数设计[J]. 农业工程学报, 2017, 33(21): 61-69.
ZHANG Jin-zhu, JIN Zhen-lin, ZHANG Tian-hao. Kinematic/Static Performance Evaluation and Geometric Parameter Design of Parallel-Driving Leg Mechanism[J]. Transactions of the Chinese Society of Agricultural Engineering, 2017, 33(21): 61-69.
[14] WANG Yan-dong, CAO Guo-hua, VAN WIM T. Dynamic Simulation of a Multi-Cable Driven Parallel Suspension Platform with Slack Cables[J]. Mechanism and Machine Theory, 2018, 126: 329-343.
[15] 荣誉, 韩勇, 刘双勇, 等. 可变胞并联机械臂样机的研制与误差分析[J]. 光学精密工程, 2018, 26(7): 1698-1707.
RONG Yu, HAN Yong, LIU Shuang-yong, et al. Development and Error Analysis of Metamorphic Parallel Manipulators[J]. Optics and Precision Engineering, 2018, 26(7): 1698-1707.
[16] 金振林, 李研彪, 谢启文. 新型四自由度并联机械臂及其位置分析[J]. 燕山大学学报, 2008, 32(4): 295-298.
JIN Zhen-lin, LI Yan-biao, XIE Qi-wen. A Novel 4-DOF Parallel Mechanical Arm and Its Position Analysis[J]. Journal of Yanshan University, 2008, 32(4): 295-298.
[17] 姚建涛, 韩博, 窦玉超, 等. 基座运动对并联调整机构动力学性能的影响[J]. 农业机械学报, 2018, 49(7): 410-418.
YAO Jian-tao, HAN Bo, DOU Yu-chao, et al. Influence of Base Motion on Dynamic Performance of Parallel Adjustment Mechanism[J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(7): 410-418.
[18] 齐有泉, 李艳文, 陈子明, 等. 串联九自由度喷涂机器人及其运动学分析[J]. 机械工程学报, 2020, 56(23): 165-171.
QI You-quan, LI Yan-wen, CHEN Zi-ming, et al. Design and Kinematics' Analying of a Series Nine-Degree- of-Freedom Spraying Robot[J]. Journal of Mechanical Engineering, 2020, 56(23): 165-171.
[19] KIM B J, YUN D K, LEE S H, et al. Topology Optimization of Industrial Robots for System-Level Stiffness Maximization by Using Part-Level Met Models[J]. Structural and Multidisciplinary Optimization, 2016, 54(4): 1061-1071.
[20] 黄真, 刘婧芳, 李艳文. 论机构自由度寻找了150年的自由度通用公式[M]. 北京: 科学出版社, 2011: 90-97.
HUANG Zhen, LIU Jing-fang, LI Yan-wen. On the Degree of Freedom of Mechanism: a General Formula of Degree of Freedom for 150 Years Has Been Found[M]. Beijing: Science Press, 2011: 90-97.
Kinematics Analysis of Parallel Driving Bidirectional Rotating Mechanical Arm for Large Component Printing
NING Feng-ping1,2, LI Rui-qin1,2,ZHANG Lei1,2,WANG Yuan1,2
(1. School of Mechanical Engineering, North University of China, Taiyuan 030051, China; 2. Shanxi Key Laboratory of Advanced Manufacturing Technology, Taiyuan 030051, China)
The work aims to propose a novel 2-UCU/U parallel drive bidirectional rotating mechanical arm applied to large component printing to make the working end of the mechanical arm reach a specific position in a plane or a curved surface. The constrained screw of 2-UCU/U mechanism was analyzed with screw theory. The degree of freedom property of the mechanism was obtained, and the rationality of the input selection was verified. The inverse position solution of the mechanism was obtained with the closed vector method, and the velocity Jacobian matrix was established. The workspace of the mechanism was obtained with search method with the help of Matlab. The motion relationship between input and output of the mechanism was analyzed. The workspace of 2-UCU/U parallel driving bidirectional rotating mechanical arm was solved, and its shape was spherical surface. Analysis showed that the motion of the mechanism was rotation in both pitch and yaw directions. The same direction movements of the driving pairs realize the pitching movement of the working arm, and the reverse direction movements of the driving pairs realize the yawing movement of the working arm. Therefore, the working arm can reach the required position of the working surface, and finally the tool connected to the end of the working arm can work at a specific position.
mechanical arm; parallel driving; bidirectional rotation; workspace; kinematics; large component printing
TH112
A
1001-3563(2022)17-0109-07
10.19554/j.cnki.1001-3563.2022.17.014
2022–01–20
先进制造技术山西省重点实验室开放基金(XJZZ202105)
宁峰平(1984—),男,讲师,主要研究方向为机构可靠性、机器人学。
李瑞琴(1964—),女,教授、博导,主要研究方向为并联机构学与移动机器人。
责任编辑:曾钰婵
猜你喜欢
出版人(2022年11期)2022-11-15 04:30:18
工会信息(2016年4期)2016-04-16 02:39:07
通信电源技术(2016年5期)2016-03-22 01:09:37
实用手外科杂志(2015年2期)2015-08-28 09:50:56
法律史评论(2015年0期)2015-07-31 18:56:51
电源技术(2015年9期)2015-06-05 09:36:07
饲料博览(2015年4期)2015-04-05 10:34:14
衡阳师范学院学报(2015年2期)2015-02-26 03:25:05
北京航空航天大学学报(2014年1期)2014-12-19 08:58:38
河南科技(2014年19期)2014-02-27 14:15:24
