
水下可移动多弹气动发射系统设计与仿真分析
2022-09-20 02:13:02康会峰宣佳林代浩然王会程王景田马秋生
液压与气动 2022年9期
康会峰, 宣佳林,, 代浩然, 王会程, 王景田, 马秋生
(1.北华航天工业学院航空宇航学院, 河北廊坊 065000;2.河北省跨气水介质飞行器重点实验室, 河北廊坊 065000)
引言
水下发射一般分为水下固定发射和水下机动发射两种发射方式[1]。水下固定发射是利用水作为屏障在江、河、湖、海的水下安装发射装置以发射导弹的发射方式,需要密封的发射筒。水下固定发射方式因生存能力不强,尚未见正式应用。水下机动发射的主要运载工具是潜艇,这种发射方式生存能力强、隐蔽性好[2]。由于军用水下航行体等装备都运行于水下,研究水下多弹发射过程中的弹丸出水速度、弹丸运行过程中的流场显示等较为复杂,在实验室中研究多弹发射过程中的多因素干扰、多相介质参与的复杂物理过程就显得尤为重要。经过多年的发展,国外的水下发射技术已取得一定的成果[3-5],国内也开展了相关研究:王亚东等[6]采用Fluent软件对导弹离筒过程筒口气泡的发展及其对发射平台的影响进行了数值模拟,并通过试验对仿真结果进行验证,总结了发射筒口气泡的发展规律,分析了筒口气泡对发射平台表面压力的影响。杨晓光等[7]对潜射导弹的水下运动及出水过程进行了数值仿真,发现潜艇速度会改变导弹水下及出水后的姿态角,水深在影响导弹的弹体应力的同时可对姿态角起到放大的作用。裴譞等[8]运用横向载荷计算模型和耦合算法对潜艇带速水下垂直发射导弹过程中导弹的运动特征、流体动力特性、弹体与弹性减震环的相互作用进行研究。赵世平等[9]通过建立导弹运动方程及求解运动方程,研究了不同艇速、不同适配器刚度和不同导弹垂向运动速度条件潜载垂直发射导弹在横向流作用下的受力情况和对出筒运动参数的影响。李志华等[10-11]研究了潜艇气动发射装置无泡系统定时调节器,研究了鱼雷不同发射深度所需的气动发射能量储备。由此可见,当前关于水下发射技术的研究多采用数值仿真的方法,研究多为单一弹丸的发射现象[12-13]、流场显示[14]和水下弹道[15]等,而对水下可移动多弹气动发射和多弹扰动等方面的研究极为少见。本研究参考陈英龙等[16]的低速域水下遥控机器人水动力试验系统设计方案,研制了一种水下多弹可移动发射试验平台,通过伺服电机带动发射平台的方式使发射系统具有一定的发射速度,在恒速状态下完成多弹的等时间间隔的发射,可通过流场显示和高速摄像获得发射初速度和水平移动速度。对水下发射的空化现象、多弹扰动规律、发射过程中弹道和流场显示的研究具有重要现实意义。
1 水下可移动多弹气动发射试验系统设计
1.1 设计目标
考虑到实验室的长度和高度有限,建设了室内水下可移动多弹气动发射平台,实现发射系统恒速条件下连续多弹水下垂直发射,发射系统速度曲线如图1所示。弹丸发射为恒速移动状态下发射,发射过程分为启动段、恒速运行段、停止段,为研究多弹发射之间的扰动,发射系统需设置有多个发射筒,并通过并联控制,发射系统的发射动力为高压气动力。为研究弹丸发射后发射筒口处的扰流流场,需要应用流动显示技术进行测量。因此,水下可移动多弹气动发射的关键技术主要是水平移动发射系统的驱动方式、水平移动发射系统速度控制的时间精度和发射速度的精度。

图1 移动速度与时间的关系Fig.1 Relationship between movement speed and time
对于驱动方式,主要有两种:一是以气炮原理为基础的模型驱动方式,二是以电机拖动为基础的模型驱动方式。前者具有启动快的特点,但很难获得恒定的移动速度;经实验后者通过采用伺服电机控制可提供较为稳定的移动速度。
1.2 试验系统结构设计
水下可移动多弹气动发射试验系统主要包括如下部分:密封水箱、加压和真空系统、水平拖拉系统、发射系统、流场显示系统、软回收系统和时间同步控制系统,具体如图2所示。

图2 水下可移动多弹气动发射试验系统示意图Fig.2 Schematic diagram of underwater mobile multi-projectile pneumatic launching test system
水密封水箱整体采用桁架式结构,在相邻侧面处,设置有加强筋板,有效增强了结构刚度和强度;水箱左右侧面设置有电源、气管和传感器等进出水箱的连接法兰和进出水箱的备用法兰,也为传感器信号、发射单元和灯光等提供密封的穿墙接口;水箱正面用有机玻璃替换钢板,提供高速摄影和PIV测量的大视窗;在水箱后面设置有进出人孔,方便设备安装和维护;在水箱顶部布设了泡沫铝夹芯板,为模型弹发射出水后提供防护。弹丸和防护层撞击时,可根据弹丸受损坏程度,改进防护层结构。水平拖拉系统为发射装置的水平在轨移动提供动力,采用伺服电机通过钢丝绳拖动的方式实现水平移动控制,伺服电机拖动为基础的模型驱动方式为主要驱动力,电机经过减速器减速后,由卷扬机通过绳索驱动,借助定滑轮换向,对发射系统进行拖拽,实现发射系统水下在轨恒速移动。由于本试验模型为缩尺模型,对速度精度要求较高,因此,发射系统的移动速度为试验系统设计的核心指标之一。
发射系统采用气动发射技术,内部设置有3个分割气室,对应3个发射筒,3个发射管集成在底部基座上,发射基座安装在滑块上,滑块安装在光轴导轨上,依靠水平拖拉系统,推动集成后的发射系统往左侧移动。每个弹丸由快速阀释放高压空气并驱动弹丸,弹丸上安装的底部O形密封圈经过发射筒格栅位置时,分割的气室分别将各自发射筒的弹丸推出,各发射筒的控制互相不关联,具体结构如图3所示。每个发射筒的启动和时间同步控制系统连接、单独进行控制,发射时间次序根据试验设定值确定。发射管分别在管口和管底部装有2个压力传感器,目的是得到桶口水击效应和底部驱动气体压力随时间变化。为了能够观察到弹丸发射的全过程,发射筒的材料为有机玻璃,弹丸发射过程容易对发射筒内壁面造成损坏,如表面拉毛,
图3 发射系统结构示意图Fig.3 Schematic diagram of launching system structure
造成高速摄影得不到清晰的筒内弹丸运动图像。因此,需要对发射筒表面进行定期维护。
2 水下可移动多弹气动发射单元发射速度计算及力学仿真
在水下可移动多弹气动发射试验中,发射单元的应力和变形较大,因此,对水下可移动多弹气动发射系统的发射单元进行有限元分析。发射单元包含发射筒、3个分割气室和弹丸。发射筒的材料为有机玻璃,发射前,发射筒上端面采用BOPP膜片和水隔离,防止水进入发射管,使得发射弹丸产生较大水阻力。弹丸质量m=2.80 kg,筒内加速距离L=1 m,发射筒内径为D=0.07 m。
2.1 发射速度计算
根据匀变速直线运动公式,可推导出速度与位移关系式:
v2=2aL
(1)
由式(1)可计算平均加速度a=50 m/s2。
根据牛顿第二定律:
F=ma
(2)
(3)
由此可获得发射压力计算公式:
(4)
式中, Δp—— 发射压力,kPa
m—— 弹丸质量,kg
g—— 重力加速度(取g=10 m/s2)
D—— 发射筒直径,m
经计算,发射压力Δp=43.654 kPa。
根据理想气体状态方程(绝热条件下):
pV=nRT
(5)
式中,p—— 压强
V—— 气体体积
n—— 物质的量
R —— 普适气体常数,R=8.31 J/(mol·K)
T—— 绝对温度
显然,压力与体积成反比,发射过程中压力在不断变小,同时考虑到发射过程中O形圈与发射筒之间存在着较大的摩擦力,实际发射压力大于理论发射压力。因此,根据发射初速度获得的理论发射气压,需进一步修正获得实际发射压力,通过几次的试验,发现实际发射压力约为理论发射压力的2~4倍。
2.2 仿真计算
本次仿真使用的击发压力和分割气室压力均为122 kPa,为理论发射压力的2.8倍,通过三维软件进行建模,通过ANSYS软件分析了该压力下的位移和载荷情况,绘制网格如图4所示,仿真分析结果如图5~图8所示。
图4 网格划分Fig.4 Meshing
图5 全局应变Fig.5 Global equivalent elastic strain
图6 发射筒应变Fig.6 Launch tube equivalent elastic strain
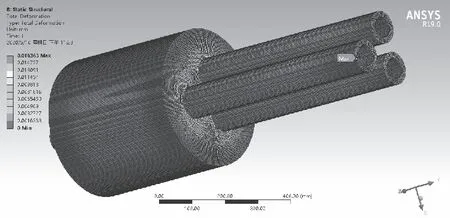
图7 全局变形Fig.7 Total deformation
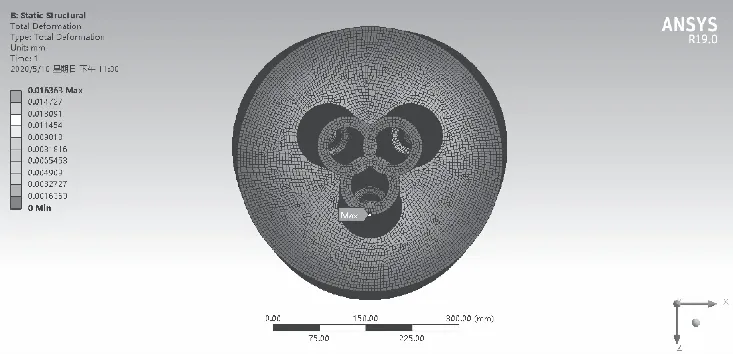
图8 总变形俯视图Fig.8 Top view of total deformation
根据仿真分析结果,发现发射系统的最大应变为0.00027126 mm,最大应变位置虽然在发射筒与分割气室的下接触处,但上接触面的应变与下界面应力接近,其余部分应力较小。最大变形量为0.016363 mm,发生在发射筒口,其原因是发射筒与分割气室的上接触面远离中心的一侧应力应变更大,导致发射筒往内侧偏斜,同时分割气室外发射筒较长,起到了变形放大的作用。结合水箱高度和发射筒高度,根据相似三角形原理,可估算出发射弹丸在静止发射状态下撞击到系统顶部时偏离竖直中心线0.045 mm左右,与水下移动发射过程中水阻对发射弹丸的影响相比,可以忽略。总体而言,发射系统结构的应变和变形较小,不会对各分割气室的密封性造成影响,受变形影响造成的方向偏移可以忽略,不会对发射试验产生影响。
3 试验及结果分析
3.1 试验环境搭建
设备水平拖拉系统选用最高转速3000 r/min,功率7.5 kW的伺服电机提供动力,选用减速比为i=5的减速器,通过卷扬机和定滑轮实现传动和换向。试验时用水泵往实验设备中注入深度为2.5 m的水,顶端空气用真空泵抽真空到0.3×10-10MPa,高速摄像机为Photron FASTCAM SA-Z高速摄像机,分辨率设定为1024×1024,高速摄像机的帧频为6500 fps,高速相机与水箱间隔距离为3.5 m,现场布置如图9所示。发射车匀速设定为0.5 m/s,小车加速度时间设定为0.3 s,弹丸发射车充气压力为0.11, 0.22 MPa,试验弹的外形为锥形,质量为2.8 kg。

图9 设备现场布置图Fig.9 Site layout plan of equipment
3.2 试验步骤
(1) 检查水箱气密性;
(2) 垂直装模型弹,安装传感器并测试,安装发射管口夹膜片;
(3) 将发射系统植入水箱并就位;
(4) 检查气路和传感器连接法兰防水及其连接是否正常;
(5) 垂直发射系统充气,关闭充气阀门;
(6) 调整PIV或高速测量系统光源和相机;
(7) 启动发射进行相关试验。
3.3 试验结果及数据分析
整个发射系统调试完毕后进行了多次试验。对获得的拍摄图片进行图像处理,测量拍摄图片中弹头位置到标尺零点的高度差,建立每张照片中发射弹丸弹尖位置数据表,标尺位置如图10所示。结合相机设定的固有采样频率,通过数据拟合获得了不同时刻弹头位移曲线和相应的速度曲线,如图11、图12所示。

图10 竖直标尺位置Fig.10 Vertical ruler position
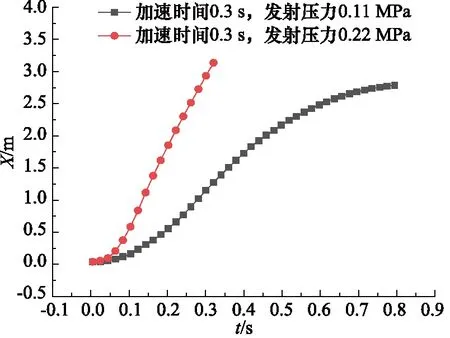
图11 位移-时间曲线Fig.11 Displacement-time curve
根据高速摄影图片,发现在0.28 s时试验弹射出发射筒口,由图11、图12可以看出在0.11 MPa发射压力下,0.28 s对应的速度为6.45 m/s。而在 0.22 MPa的发射压力下,试验弹在0.12 s时试验弹射出发射筒口,此时的速度最大为14 m/s。
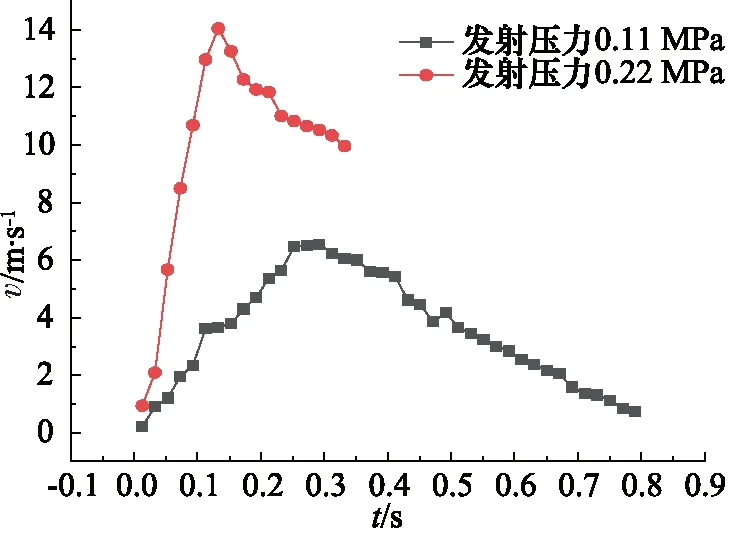
图12 速度-时间曲线Fig.12 Velocity-time curve
通过理论速度计算方法可计算两种压力下的试验弹的出口速度,表1为两种发射压力的理论速度和实际速度。由表可知,计算的理论速度与实际速度接近,验证了计算方法的可靠性。说明水下低压气动发射,可通过修正系数代替发射过程中的摩擦力、气组、水阻力的方式大致估算发射筒出口速度,且发射压力越高修正系数越小。
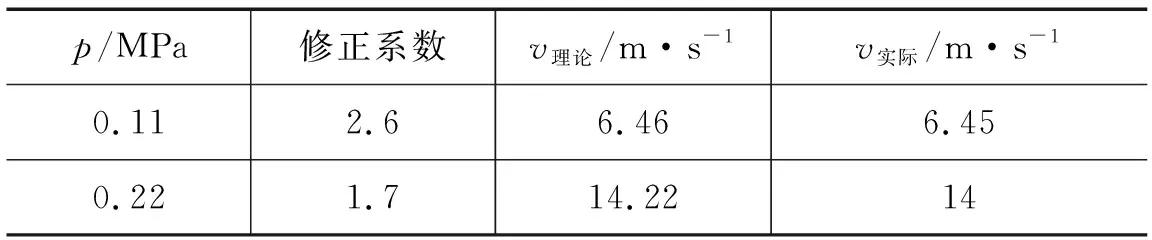
表1 两种压力的理论速度与实际速度对比表Tab.1 Comparison table of theoretical speed and actual speed for two types of pressure
从图11~图12中可以看出,试验过程中试验弹出筒后出水前的速度总体上在不断减小,但速度变化并不规则,出现了短时间振荡的现象,其原因可能是弹在水中受水阻力、重力、空泡流和浮力等因素的综合作用,加速度不稳定,待弹丸出水后速度做接近匀减速运动。
4 结论
本研究通过分析水下可移动多弹气动发射的研究需求,完成了水下可移动多弹发射系统的设计,建立了水下可移动多弹气动发射系统的模型。通过分析弹丸发射过程中发射系统的各部分结构的受力情况,计算出指定发射初速度下的发射压力范围,运用ANSYS软件对模型进行了结构仿真,发现发射筒与分割气室接触面的应变和变形量最大,最大应变为0.00027126 mm,最大变形量为0.016363 mm,均在试验允许的范围内。还发现发射筒与分割气室的上接触面远离中心的一侧应力应变更大,导致发射筒往内侧偏斜。最后进行了试验,获得了弹丸的位移-时间曲线和速度-时间曲线,验证了该系统设计的可行性及可靠性。水下可移动多弹发射系统的研制解决了弹丸发射出口速度不容易控制的问题,对水下可移动多弹气动发射关键技术的研究的具有重要意义。
猜你喜欢
广东石油化工学院学报(2022年4期)2022-09-13 01:36:28
海军航空大学学报(2022年2期)2022-05-15 11:07:54
中国设备工程(2021年24期)2021-12-31 02:37:48
小学生必读(中年级版)(2021年12期)2021-12-02 09:04:43
汽车零部件(2019年5期)2019-06-13 06:25:50
舰船科学技术(2018年6期)2018-07-02 10:24:34
电子测试(2018年9期)2018-06-26 06:45:46
科学与财富(2018年13期)2018-06-13 09:56:14
广西电力(2016年5期)2016-07-10 09:16:44
机械制造与自动化(2015年5期)2015-07-01 23:57:27
