基于MEMS操作机构的微型夹持器设计
2022-09-20 02:22张雷
内燃机与配件 2022年13期
1 国内外研究现状
微型夹持器是一种广泛应用于微操作领域的关键仪器。随着微电子技术和微细加工技术的快速发展,航天航空、生物学研究、现代医学以及军工领域的各种专用零部件设计得越来越微小
,这些零部件都具有轻、薄、脆、软等特性,在装配、移动、夹持等方面都提出了相当高的要求。同时为了不损坏操作对象,需要微型夹持器具有高精度、高可靠性、高适应性以及结构简单等优点。国内外不同领域的相关学者先后开发出了压电陶瓷驱动式、集成微力感知式、柔性铰链式等微型夹持器,打通了微型机械零部件操作的关键环节,因此,微型夹持器的设计与研发对微型机械的发展具有重大意义
。
1.1 柔顺机构简介
传统的机构传动都采用刚体进行运动副的连接,机构中存在的运动副会导致很多问题,例如:非精密装配导致的误差,磨损引起的变形,传动过程引起的震动等
。这些问题在微型机构设计中会得到放大,甚至直接引起机构设计功能无法实现,因此无法采用刚性体进行微型夹持器的设计。
部分公民环保意识薄弱,碳信息披露可以促进企业可持续发展,但企业对此认识不够深刻,这些都使碳披露难以发挥其对经营管理的指导作用。这就需要社会广泛宣传低碳经济理念,提高公民的环保意识,进而逐步上升到企业管理层面,使管理者提高环保责任意识,加大对碳信息的重视。通过学习,掌握必要的碳披露知识,推动经济社会可持续发展。
柔顺机构不同于传统的刚性体机构,它主要依靠柔顺机构的柔顺体变形实现运动传递
。柔顺机构主要有以下特点:
(1)减少零件数量
对于韵律活动教学而言,歌曲就是教师教学过程的催化剂,所以选择合适的音乐对于教学效果来说是至关重要的。选择了一首恰到好处的音乐,不仅能够让幼儿心情愉悦,也能够让他们兴致勃勃地去倾听。只有幼儿对歌曲的内容真正感兴趣、愿意去听歌曲表达的内容跟含义,他们才有可能在歌曲内容的基础上发挥自己的想象力,去联想与歌曲有关的内容。
式中:
-活动件构件数,
-低副约束数
(2)降低磨损,减少润滑
(3)减轻机构重量
为了实现结构简单、夹持力均匀、便于操作等目的,该微型夹持器采用对称性设计,故其单边结构放大比为15。由于采用一级放大机构,要达到该放大比,则设计结构将很大,且挠性增加;采用三级放大机构,势必会造成结构复杂、稳定性降低等缺陷,综合考虑采用二级放大机构。由于前端机构需要驱动后端机构,故放大比分配前小后大,即15=3×5。
随着现代设计方法的快速发展,现在主要采用有限元、拓扑优化、伪刚体建模等方法进行柔顺机构设计
,极大地提升了设计效率和夹持器设计精度,且减少了工作量。
1.2 微型夹持器分类
微夹持器作为微型机械的执行部件,需要极高的精度、效率以及稳定性。国内外学者针对不用的应用领域设计了各式微型夹持器,大致可以通过结构设计、应用领域、生产工艺和驱动方式几个方面对微型夹持器进行区分。按照不同的驱动方式可以大致将微型夹持器分为压电驱动式、静电驱动式、电磁驱动式、热驱动式、真空吸附式和记忆合金式等
。
压电驱动式微夹持器主要是通过给压电陶瓷施加电场,由于压电陶瓷的逆压电效应特性,压电陶瓷会产生微小形变,通过放大机构便可以将该微小形变作为微型夹持器驱动源。
静电驱动式微夹持器主要是通过改变激励电压,促使相距较近的两平行板分别带上极性相反的电荷,从而产生库仑力,利用库仑力作为驱动源。
电磁式微夹持器主要是以电磁力作为驱动源,但是因为设计必须含有线圈结构,所以该类微型夹持器一般尺寸较大。
机构的自由度分析
真空吸附式微夹持器主要是通过调节吸管电压来产生负压,用负压吸附操作对象。但是吸附对象外部形状对夹持成功率影响很大,形状不符合的对象会产生漏气消除负压导致操作失败。
综合分析微型夹持器的工作范围,压电陶瓷标称位移以及设计技术指标等相关参数,本文采用杠杆放大机构进行结构设计,经计算,放大比为:
2 微型夹持器的结构设计
2.1 微型夹持器技术指标
本文设计的微型夹持器,将改变夹持范围过小的缺陷,扩大其夹持范围。为了较好地完成MEMS机构中的齿轮轴、齿轮、平衡摆等操作对象的夹持任务,故确定以下参数:末端开口值不小于900μm,且不大于100μm;即:Y
< 100μm,Y
> 900μm。
为了简化机构,缩小夹持器的体积,同时减少传动比和能量的损失;结合MEMS-PZT堆叠压电陶瓷的相关参数,对夹持器的输入技术指标确定为:△X=0~30μm。
2.2 压电陶瓷选型
石英材料在受到外部压力的情况下,会在内部发生电荷移动,这种现象被称为压电效应。反之,若将石英材料置于电场中时,石英材料也会产生微小形变,这种现象被称为逆压电效应。将逆压电效应运用在微型夹持器领域,可以为微型夹持器提供驱动源,压电陶瓷便是一种理想的驱动器。压电陶瓷根据其产生的位移方式不同可以分为直线形位移和弯曲形位移
,直线形位移压电陶瓷也称为堆叠式压电陶瓷,弯曲形位移压电陶瓷也称为悬臂梁式压电陶瓷。本文采用堆叠式压电陶瓷作为驱动器,以产生直线形位移。堆叠式压电陶瓷如图1所示。
2.3 两组患者治疗前后tPSA、fPSA及睾酮水平比较 常规治疗组患者治疗前后tPSA、fPSA水平比较差异无统计学意义(P>0.05)。非那雄胺组患者治疗后tPSA、fPSA水平均较治疗前明显降低,差异有统计学意义(P<0.05)。非那雄胺组患者治疗后tPSA水平较常规治疗组低,差异有统计学意义(P<0.05)。两组患者治疗后睾酮水平均较治疗前降低,但差异无统计学意义(P>0.05),见表2。
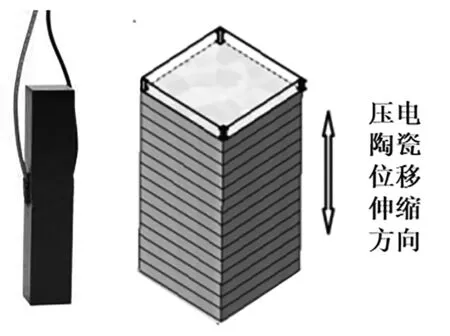
堆叠式压电陶瓷驱动器具有输出位移小,输出力大;响应速度快;精度高;可实现直线位移等特点
。根据哈尔滨溶智纳芯科技有限公司提供的压电陶瓷PZT选型手册,选取型号为RP150/5×5/30的堆叠压电陶瓷,其相关参数如表1所示。

2.3 理论模型
形状记忆合金微夹持器是通过形状记忆合金材料对形状具有记忆和恢复的特性来提供驱动源,这种材料的响应速度较快,在微机械领域得到快速发展。
式中:Δ
-杠杆放大机构输出位移,Δ
-杠杆放大机构输入位移。
So we think the learner autonomy should be developed with the guide and controlled by the teacher.Without teachers’guide,it will bedifficult toachieve.
(4)易实现微型化
热驱动式微夹持器主要是以热能为驱动源,现在主要有电热和光热两种能量来源。
=3
-2
=3×5-2×7=1
取其中3例在发病年龄、手术年龄、Lenke分型、角度大小、Risser征等参数相匹配的患者凹侧和凸侧椎旁肌组织,提取总RNA,测定RNA纯度与质量,在5’和3’端分别连接接头序列,形成带有接头的单链RNA,反转录生成RNA/DNA杂交链,PCR扩增构建small RNA-seq cDNA文库,采用illumina Hiseq测序平台(上海晶能生物有限公司,中国)单端测序模式进行高通量测序。
则微型夹持器的理论放大倍数
综合考虑微型夹持器的工作范围、压电陶瓷标称位移和工作最大空间,确定
1=4mm;
2=12mm;
3=15mm;
4=75mm。选取铰链宽度
=4mm,铰链高度
=3mm,铰链最小厚度
=0
45mm。结构图如图2所示。
2.4 铰链模型
微型机械通常采用柔顺机构实现运动传递,完成转动副设计,可以有效避免传统转动副带来的各种缺陷。本文采用柔性铰链设计微型夹持器关键节点。柔性铰链是互为一体的两个构件,两构件之间可以发生相对转动。这种设计可以避免装配环节引起的误差,同时可以减小设计尺寸和机构复杂度。常见的柔性铰链有直梁式和圆弧式如图3所示
。
2.2 3组术前、术后血红蛋白的比较 A、B、C 3组血红蛋白术后各时点均较术前明显升高,3组间术后3个月随访血红蛋白差异无统计学意义(P>0.05),术后6、12个月B、C组血红蛋白明显高于A组,3组间差异有统计学意义(P<0.05)。见表3。
本文设计的微型夹持器采用的是直圆双圆式柔性铰链。其模型图如图4所示,t为铰链最小厚度,R为铰链圆弧半径
。
3 微型夹持器的设计及仿真
3.1 微型夹持器的造型设计
通过微型夹持器的结构设计已经求出了各关键部位的参数,根据相关参数将在三维造型软件Pro/E中进行三维建模。
图5(a)为微型夹持器的设计工程图,表2为微型夹持器的相关设计参数,根据相关参数微型夹持器的三维建模和结构修正。图5(b)为微型夹持器的三维模型。
JDR-30DB绞车可用于3000 m深地热井(水井)施工,其结构简单、重量轻,可挡内无级调速,电机具有悬停和过载功能,提升能力强;采用电气化控制,安全防护措施多;具备自动送钻技术,降低了绞车的运行成本,提高了工作环境舒适程度。该绞车性能特点体现了“安全、先进、可靠、环保、智能”的设计原则,既能满足深孔地热井施工的需求,也可用于水井、煤层气、页岩气、油气井施工,具有广阔的市场前景。

3.2 微型夹持器的数值仿真
使用ANSYS进行微型夹持器的数值仿真,可以得出该微型夹持器的变形情况和受力情况,然后判断该夹持器的设计合理性。
将完成的三维模型导入ANSYS Workbench,设置材料为40CrA,弹性模量210GPa,泊松比0.3,密度7800kg/m
。按照压电陶瓷驱动器的最大位移30μm作为输入参数,设置好边界条件,完成网格划分后进行仿真计算,仿真结果如下。
苏州以古典园林、江南水乡与千年古城见长,文物古迹众多,晚明、清朝前期更成为江南地区的经济、文化中心之一。苏州景观一级目录和二级目录的数量紧随杭州之后,分别为24、60项,山水如虎丘、支硎山和千尺雪等,园林如苏州织造府、狮子林等,祠庙如范公祠、文庙和三高祠等,都是康、乾二帝重点游览之处。
基于物联网概念的警用仓库物联网报警信息监控平台系统是集三维信息呈现,多方位信息感知,报警联动等技术于一体的全方位信息呈现系统。通过数据对接,物联网技术等手段,对仓库内物资环境信息进行实时显示,并对异常问题进行定位提示,实现从对仓库从物资信息到安防监控全方位的信息呈现。
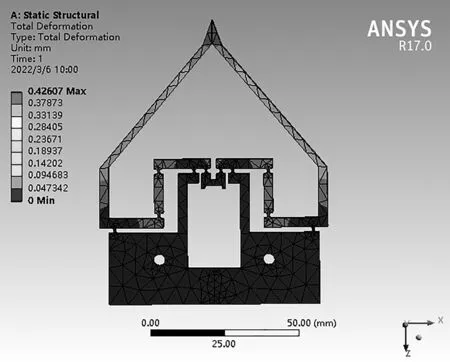
如图6所示为微型夹持器的变形云图,在压电陶瓷输入最大位移的情况下,夹持器微夹钳单边最大位移为0.426mm,双边位移为0.852mm,即该微型夹持器最小开口为50μm,小于100μm,符合设计要求。
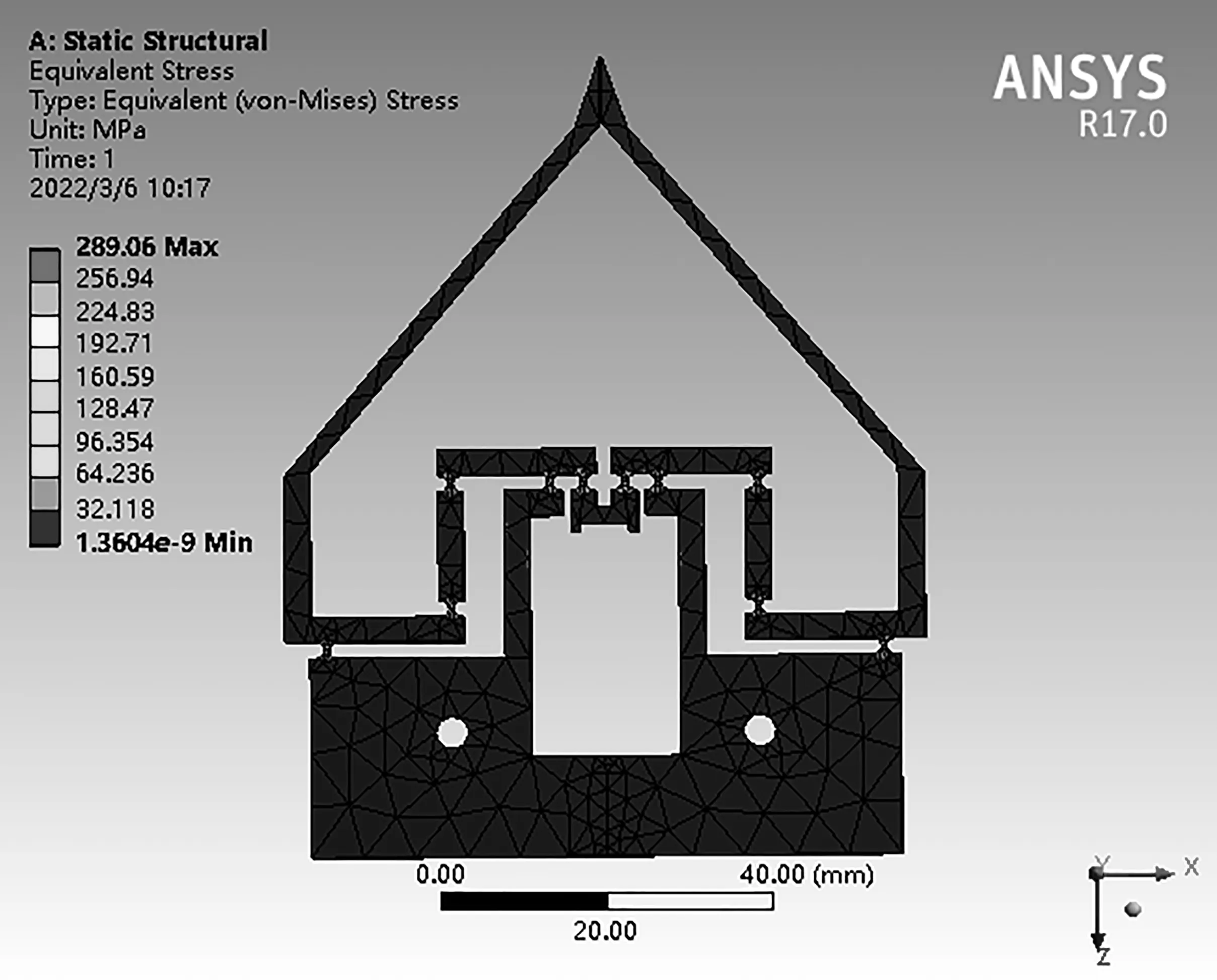
如图7所示为微型夹持器的应力云图,在压电陶瓷输入最大位移的情况下,夹持器的应力主要集中在各处柔顺铰链,最大应力出现在第一级放大机构的柔顺铰链处,应力值为289.06MPa,小于40CrA的许用屈服极限应力833MPa,符合设计要求。
4 结束语
根据MEMS机构装配以及微小零件夹持要求,设计了一种基于柔性铰链的二级放大微型夹持器。夹持器采用杠杆放大机构,放大比为30;设计最大张合量为900μm,最小张合量小于100μm;采用压电陶瓷驱动方式作为驱动源,型号选取为RP150/5×5/30堆叠式压电陶瓷;采用直圆式柔性铰链并完成微型夹持器三维模型的建立。并完成该微型夹持器的有限元仿真,仿真结果显示其在变形和应力方面均表现良好,符合设计要求。本文对微型夹持器的设计方法和微型机械柔性机构的设计有一定的参考意义。
[1]卢小平.现代制造技术[M].清华大学出版社有限公司,2003 .
[2]张培玉,武国英,郝一龙等.微夹钳的研究进展与展望[J].光学精密工程,2000,8(4):292-296.
[3]刘登云,杨志刚,程光明等.微位移机构的现状及趋势[J].机械设计与制造,2007(1):156-158.
[4]武敏. 压电驱动双摇杆式微夹持器设计与性能研究[D].浙江大学,2015.
[5]L L.Howell.Compliant Mechanisms[M],John Wiley & Sons Inc,2001.
[7]Haddab Y, Chiailent N,Bourjault A.A Micro-gripper Using Smart Piezoelectric Actuators [C]. Proceedings of the 2000 IEEE/RSJ International Conference on Intelligent Robots and Systems. Takamatsu, 2000:659-664.
[8]席文明,钟辉.电磁力驱动的微夹持技术[J].纳米技术与精密工程,2008,6(3):195-198.
[9]陈海初,王振华,李满天等.两级位移放大微夹持器的研究[J].压电与声光,2005,27(3):300-302.
[10]王代华,杨群.一种压电致动微夹钳及其开环位移特性[J].纳米技术与精密工程,2010,8(1):47-53.
[11]蔡建华. 新型微夹钳技术研究[D].华中科技大学.2006.
[12]Devoe ,D L, Pisano A P . Modeling and Optimal Design of Piezoelectric Cantilever Microactuators [J]. Journal of Micro-electromechanical Systerm, 1997, 6 (3) 266-269 .
[13]吴鹰飞,周兆英.柔性铰链的应用[J].中国机械工程,2002(18):91-94+6.
[14]Lobontiu N. Compliant Mechanisms: Design of Flexure Hinges[M]. CRC Press, 2010.
[15]杨国兴,张宪民. 基于有限元方法的柔性铰链式微夹持器优化设计[J]. 中国机械工程,2006-05.
猜你喜欢
现代企业(2021年11期)2021-12-08
时代汽车(2021年11期)2021-08-04
汽车实用技术(2019年1期)2019-10-21
中国计算机报(2019年29期)2019-09-18
居业(2018年5期)2018-10-24
现代职业教育·职业培训(2018年9期)2018-05-14
中学生数理化·八年级物理人教版(2016年5期)2016-08-26
中学生数理化·八年级物理人教版(2014年1期)2015-01-09
CHIP新电脑(2014年5期)2014-05-14
棋艺(2001年7期)2001-06-14