基于行人横穿场景的AEB系统性能测试与评价研究
2022-09-19 12:18:44苏占领牛成勇徐建勋张国勇刘冰玉
辽宁工业大学学报(自然科学版) 2022年4期
苏占领,牛成勇,徐建勋,张国勇,刘冰玉
基于行人横穿场景的AEB系统性能测试与评价研究
苏占领1,2,牛成勇1,2,徐建勋1,张国勇1,刘冰玉3
(1.招商局检测车辆技术研究院国家智能网联汽车质量检验中心,重庆 401329;2.汽车主动安全测试技术重庆市工业和信息化重点实验室,重庆 401329;3.通用技术集团国测时栅科技有限公司,重庆 401329)
为研究不同感知方案对自动紧急制动(AEB)系统性能的影响,按照Euro-NCAP行人横穿CPFA-50测试场景对某两台乘用车进行多次测试,在Euro-NCAP规程的评价指标外,引入AEB系统刹停后距行人的距离、预警时刻TTC、预警距紧急制动的时间间隔和最大减速度等参数,并通过对样车AEB系统紧急制动过程的分析以及驾驶员心率的监测,最终对不同感知方案的优劣进行分析,并对AEB系统的性能和舒适性进行评价。
自动紧急制动(AEB)系统;预警TTC;舒适性;减速度变化率;测试评价
近年来,车辆主动安全技术已成为车辆安全性和智能化的研究热点,其中自动紧急制动系统(以下简称AEB系统)在车辆主动安全的研究中十分重要[1],根据CIDAS交通事故数据库关于行人交通事故的统计,2020年间因车辆未配置AEB系统而造成的行人交通事故较2019年增加10.98%。当行人出现在正在行驶车辆的前方,驾驶员没有制动或制动不及时而发生碰撞危险时,通过车辆AEB系统来避免碰撞的发生,可有效减少行人碰撞事故,提升行人和车辆行驶的安全性[2-3]。
当前AEB系统在乘用车上的配置率越来越高,其性能的优劣也越来越被关注,如何通过场地试验对不同型号乘用车的行人AEB系统性能进行测试和评价就显得十分重要[4]。本文通过搭建Euro-NCAP(2020版)测试工况,对某2台样车的行人AEB系统的性能和舒适性进行分析和评价,为后续AEB系统的舒适性评价提供一种可能的测试方法。
1 AEB系统的组成及工作原理
当前国内乘用车所配置的行人AEB系统的功能架构主要由感知模块、决策模块和执行模块组成,如图1所示。
图1 行人AEB系统的组成
在实际的道路驾驶中,行人AEB系统的感知模块利用传感器(摄像头、雷达)对周围环境进行感知和识别,并采集所识别目标的相对位置、距离、速度等数据信息;随后决策层通过对应的算法对所采集数据进行运算和处理,以此判断所识别目标物是否存在“碰撞风险”;最后系统通过执行模块对有“碰撞风险”的目标物进行声音或光学预警,并在驾驶员无制动、制动力不足和制动不及时时紧急执行制动,避免或缓解碰撞的发生[5-7]。
2 行人AEB系统性能测试及评价
2.1 测试场景及设备
为进行分析研究,选取某2台国产乘用车(记为A样车和B样车,A、B样车所配置的毫米波雷达为同一型号))在重庆机动车强检试验场进行测试,其感知方案如表1所示。
考虑Euro-NCAP的行人AEB测试工况较多,为便于分析,在此选取较典型的远端行人横穿(CPFA-50)场景下车速为40 km/h的工况进行场地测试,如图2所示。该工况下行人横穿速度为8 km/h,行人目标与样车碰撞位置为样车前端结构的50%处,也即在测试过程中若样车无任何制动减速,样车与横穿的行人将在测试设定坐标位置发生碰撞,且碰撞发生时行人刚好移动至样车前保正前方的50%处。
表1 样车感知方案
样车A车B车 传感器数量12 感知方案毫米波雷达毫米波雷达+摄像头
图2 A和B样车进行远端行人(CPFA-50)测试
为排除测试结果的偶然性,在CPFA-50的场景下,分别对2台样车进行车速为40 km/h的5次重复测试。测试设备主要有:ABD组合驾驶机器人(包括油门和转向机器人);行人控制和拖动设备;牛津RT3002陀螺仪;声光采集(AVAD3)设备,如图3所示。

2.2 测试结果分析
依据Euro-NCAP评价规程,在CPFA-50场景中车速不超过40 km/h的工况能实现避撞即可得满分,A、B样车在5次重复测试中都可实现避撞,其测试结果都可得到满分。然而在是否能够避撞的评价指标下,2台样车的行人AEB系统性能明显存在优劣。为进一步对2台样车的AEB系统性能进行研究,在此引入AEB系统刹停后距行人的距离s、预警时刻TTC、预警距紧急制动的时间间隔t(紧急制动指的是AEB系统制动减速度首次达到4 m/s2)和最大减速度a等参数对AEB系统性能进行分析和评价,测试结果如表2所示。
表2 重复试验结果
次数剎停距离预警TTC时间间隔最大减速度 A车B车A车B车A车B车A车B车 10.751.190.710.960.341.0510.279.93 20.691.260.630.990.320.9510.2110.03 30.721.240.681.020.381.0310.269.97 40.71.20.641.000.400.9710.29.94 50.731.240.671.010.391.0110.2810.02
在以上参数中,剎停距离s除可判断车辆是否避撞,还可评价AEB系统对行人的剎停距离是否合适;预警TTC可评价用于提示驾驶员报警的早晚是否合理;在避免AEB系统“非紧急”情况频繁触发的前提下,预警距紧急制动的时间间隔t可衡量AEB系统为驾驶员预留的介入反应时间是否够用;最大减速度a可评判AEB系统紧急制动的剧烈程度。在行人AEB系统性能的测试中,以上各参数的大小将直接影响AEB系统性能的优劣,如表3所示。
表3 参数大小对行人AEB性能的影响
刹停距离预警TTC时间间隔减速度 较大非紧急场景易误触发,易追尾预警早,驾驶员过度紧张制动不够紧急,预警早制动剧烈,不舒适感严重 较小AEB作用较晚,制动剧烈预警晚,易碰撞或避撞后制动剧烈预留的介入反应时间短制动不紧急,制动距离较小
A、B样车在5次重复测试中性能较稳定,如图4~图7所示。
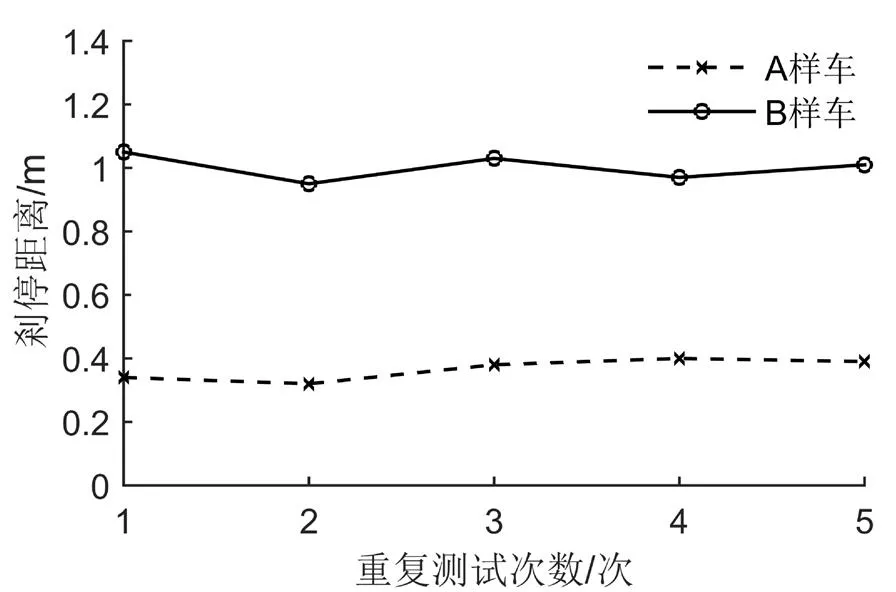
图4 剎停距离重复测试结果
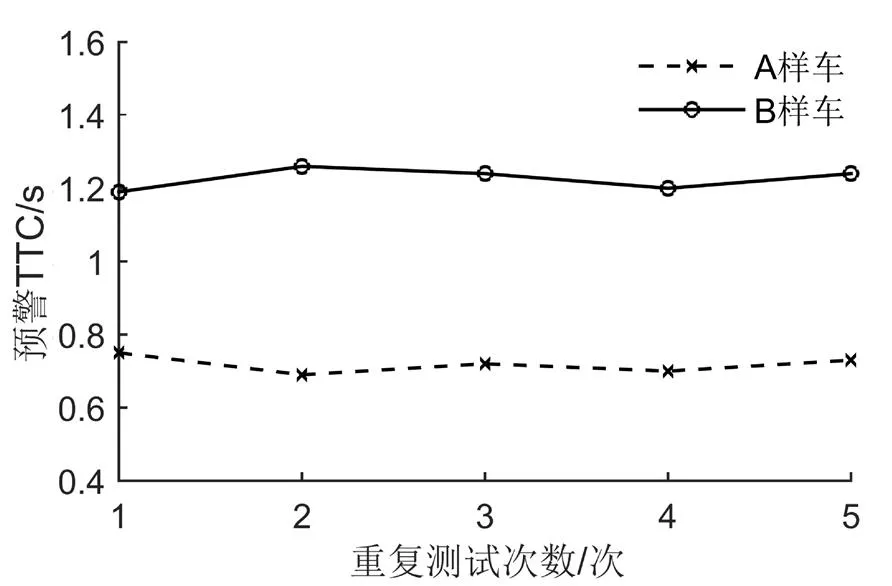
图5 预警TTC重复测试结果
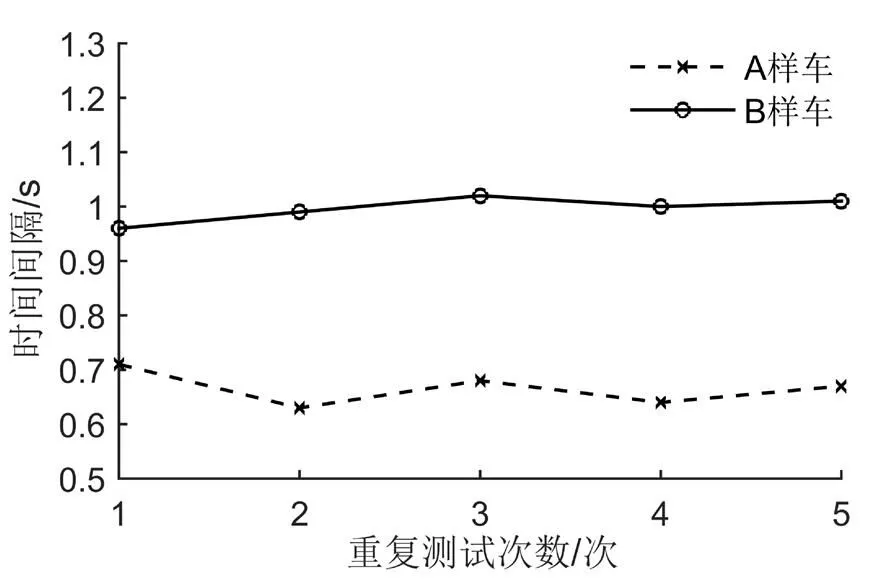
图6 时间间隔重复测试结果

图7 最大减速度重复测试结果
为便于研究以第3次测试结果进行分析。在检测到行人目标后,A样车AEB系统在TTC为0.72 s时开始预警,首次预警0.68 s后系统减速度达到4 m/s2,制动过程中最大减速度为10.26 m/s2,最终样车剎停后距行人目标0.38 m。B样车在TTC为1.24 s时开始预警,预警后AEB系统进行点刹,首次预警1.02 s后系统减速度达到4 m/s2,制动过程中最大减速度为9.97 m/s2,最终样车剎停后距行人目标1.03 m。
2.3 行人AEB系统性能测试评价
根据国内外测试规程,并结合大量测试数据可知,行人AEB系统的预警TTC一般不小于1.2 s较合适;剎停距离一般控制在1.0~1.5 m间较好;最大减速度a一般不宜超过13 m/s2;考虑一般液压制动系统的作用滞后时间约为0.2 s,驾驶员在听到报警后进行制动的反应时间约为0.8 s,为给驾驶员预留足够的制动反应时间,时间间隔一般不小于1 s。对比A、B样车的测试结果,虽然2台样车在制动过程中最大减速度相差不大,并都能避撞,但相较于B样车,A样车AEB系统对行人目标预警较晚,剎停后距行人距离较小,AEB制动较剧烈,对驾驶员的精神和心理刺激较强烈。此外,因A样车AEB系统预警晚、无点刹,时间间隔较短,驾驶员无法及时制动或转向来避免AEB系统非必要的作用。
虽然A、B样车AEB系统所配置的毫米波雷达为同一型号,但A样车仅配置了毫米波雷达,B样车AEB系统为毫米波雷达和摄像头融合方案。作为常用于乘用车AEB系统的传感器,毫米波雷达具有感知距离远、测距精度高等优势,但其较难识别目标物的高度和外形,摄像头能够较好识别目标物的高度和形状,但其测距精度差,并易受天气和光照等环境影响[8]。相较于单毫米波雷达方案,毫米波雷达+摄像头融合方案可在目标物识别时,使用“融合算法”增强对目标的识别稳定性,提升多传感器间的置信度,降低对目标物的误触发率,提高AEB系统的鲁棒性、感知精度和识别稳定性,更好的对目标物的速度、距离、位置信息进行采集,避免因样车的震动或目标物的晃动,造成目标识别的丢失和AEB系统的退出[9]。综上,配置融合方案的B样车AEB系统性能在预警TTC、剎停后距行人距离及预留的反应时间等方面要优于A样车。
3 行人AEB系统舒适性测试与评价
3.1 行人AEB系统舒适性测试
在A、B样车AEB系统最大减速度差别不大的情况下,减速度变化的快慢直接影响到驾驶员的主观驾乘感受,减速度变化率越大,制动越紧急,其带来的不舒适感越强烈。此外,研究表明人在过度紧张和惊吓时,心跳和脉搏次数会迅速升高[10],正常人的脉搏次数和心跳次数是一致的(60~100次/min),可通过监测驾驶员在行人AEB系统作用过程中的脉搏获得其心率变化,从而对样车AEB系统的舒适性进行评价。为进一步对A、B样车AEB系统作用过程的舒适性进行评价,在此引入减速度变化率和驾驶员心率进行分析。
在CPFA-50的场景下,再次对2台样车进行车速为40 km/h的5次重复测试,测试中使用欧姆龙HEM-6320T手腕式血压测量仪对同一驾驶员的心率变化(从测试开始到样车制动停止)进行监测,并对样车减速度变化率进行分析,结果如图8和图9所示。

图8 减速度变化率重复测试结果

图9 心率监测重复测试结果
3.2 行人AEB系统舒适性分析与评价
以A、B样车第3次测试数据进行分析,B样车减速度变化率为9.87 m/s3,A样车较大为16.31 m/s3,A样车的减速度变化率远大于B样车,也即A样车在相同时间段内减速度下降最快,制动最剧烈。对A、B样车减速度变化过程进行分析,如图10和图11所示。
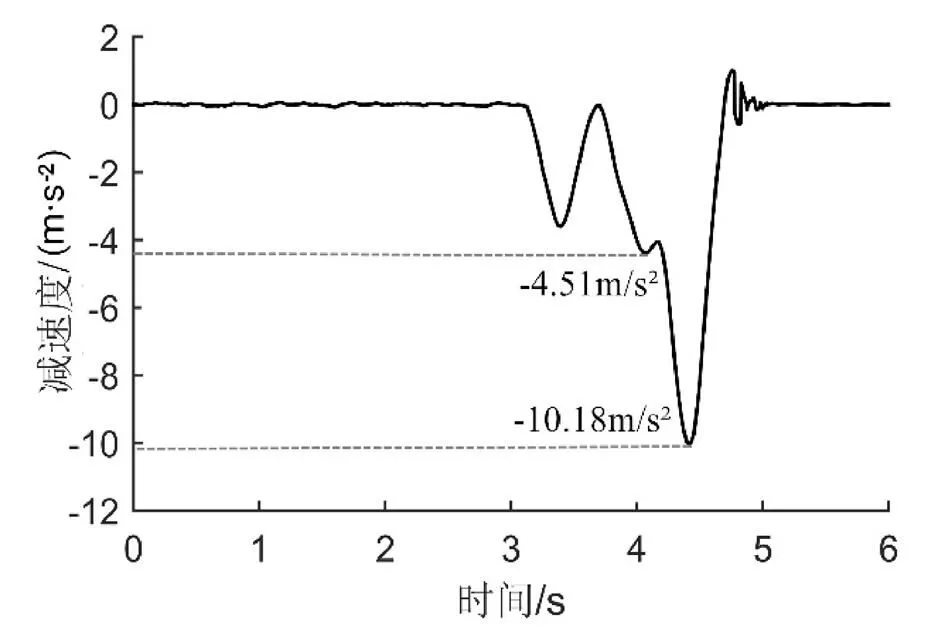
图10 A样车AEB系统减速度变化曲线
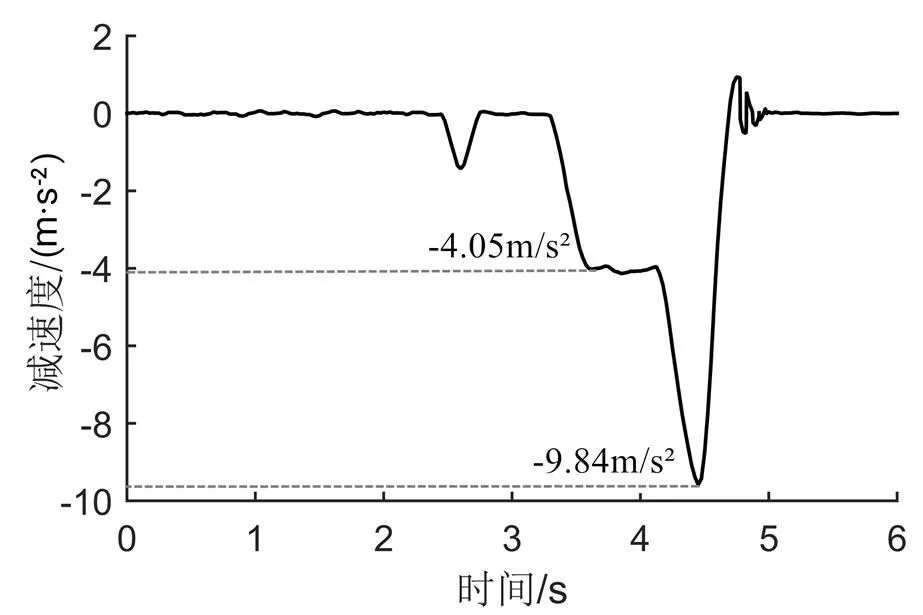
图11 B样车AEB系统减速度变化曲线
在最大减速度差别不大的情况下,B样车AEB系统识别行人目标后,先进行了减速度为1.58 m/s2的点刹提醒驾驶员,随后进行减速度为4.05 m/s2的一级制动,并在一级制动持续0.43 s后进行减速度为9.84 m/s2的二级制动,将样车刹停,减速度变化率为9.87 m/s3。A样车AEB系统识别行人目标后,先进行了减速度为3.78 m/s2的制动,随后因目标识别的不稳定,制动作用退出,在重新稳定识别目标后,AEB系统进行了减速度为4.51 m/s2的一级制动,然后进行了减速度为10.18 m/s2的二级制动,将样车剎停,减速度变化率为16.31 m/s3。对比A样车AEB系统因目标识别的不稳定,在制动退出后进行了极不舒适的二级制动,B样车AEB系统“阶梯形”的制动策略使整车减速度呈阶梯形逐步升高,并在一级制动作用时维持了0.43 s,有利于驾驶员对样车减速度变化的调整和适应,较大程度的改善了AEB系统作用带来的不舒适感。
此外,在重复测试中A、B样车驾驶员的心率变化也存在较大差异(如图9所示),在5次重复测试中,驾驶员在A样车上的心率变化明显高于B样车。其中在第3次测试中,A、B样车驾驶员的心率变化最大值分别为109、93次/min,也即与B样车相比,A样车在AEB系统作用过程中对驾驶员所造成的紧张和惊吓等生理性刺激较大,驾驶员的心率和脉搏等医学指标变化更明显。结合A、B样车减速度变化率的测试结果可知,行人目标识别稳定、采用“阶梯形”制动策略的B样车AEB系统舒适性优于A样车。
4 结论
根据某2台样车行人AEB系统的测试结果,对其AEB系统不同感知方案和制动过程各参数进行分析与研究,得出相关结论:(1)在Euro-NCAP(2020版)规程的评价指标外,通过对样车AEB系统刹停后距行人的距离、预警时刻TTC、预警距紧急制动的时间间隔、最大减速度、减速度变化率及驾驶员心率等参数的分析和研究,可对行人AEB系统的性能和主观舒适性的优劣进行评价,并为后续AEB系统的舒适性评价提供一种可能的测试方法。(2)通过对乘用车AEB系统常用的感知方案进行对比分析,相较于单毫米波雷达方案,融合方案具有识别稳定性好、测距精度高等优势。
[1] 郑苏, 段敏, 陈天任. 车辆主动避撞系统控制策略研究[J]. 辽宁工业大学学报: 自然科学版, 2020, 40(1): 26-30.
[2] 孙航, 孙悦, 解瀚光. 基于CIDAS数据库的先进驾驶辅助系统安全效果研究[J]. 中国汽车, 2019(11): 46-51.
[3] 周文帅, 李妍, 王润民, 等. 自动紧急制动系统(AEB)测试评价方法研究进展综述[J]. 汽车实用技术, 2020, 45(18): 34-40, 49.
[4] 林国庆, 逯超, 韩龙飞, 等. 汽车自动紧急制动系统行人测试与评价方法[J]. 汽车安全与节能学报, 2020, 11(03): 296-304.
[5] 牛成勇, 苏占领, 吴昆伦, 等. 汽车前撞预警系统传感器测距精度测试与研究[J]. 汽车工程学报, 2019, 9(5): 373-379.
[6] 黄超智, 龙军, 周金应, 等. 基于JT/T 1242-2019的AEB测试研究[J]. 公路与汽运, 2020, (3): 1-6.
[7] 黄城, 冀杰, 陈琼红, 等. 考虑舒适性的AEB避撞算法及仿真验证[J].重庆理工大学学报: 自然科学, 2021, 35(4): 39-48.
[8] 向世林. 汽车自动紧急制动系统行人避障策略及仿真[J].机械制造与自动化, 2021, 50(3): 113-117.
[9] 牛成勇, 苏占领, 吴昆伦, 等. 危险品运输车主动防撞系统性能测试分析[J]. 华东交通大学学报,2019, 36(4): 32-38.
[10] 赵一兵, 刘昌华, 郑震, 等. 基于多传感信息融合的智能车辆定位方法[J]. 汽车工程学报, 2021, 11(1): 1-10.
[11] 熊强强, 尹建平, 姚卫国, 等. 一种智能型腕带式心率检测仪的设计与实现[J]. 国外电子测量技术, 2020, 39(2): 88-92.
Research on Performance Test and Evaluation of AEB System Based on Pedestrian Crossing Scene
SU Zhan-ling1,2, NIU Cheng-yong1,2, XU Jian-xun1, ZHANG Gou-yong1, LIU Bing-yu3
(1. China Merchants Test Vehicle Technology Research Institute,National Intelligent Network Vehicle Quality Inspection Center, Chongqing 401329, China;2.Chongqing Key Laboratory of Industry and Information for Automotive Active Safety Testing Technology, Chongqing 401329, China;3.Genertec Guoce Time Grating Technology Co.,Ltd, Chongqing 401329, China)
In order to study the impact of different perception schemes on the performance of the automatic emergency braking (AEB) system, two passenger cars were tested several times according to the Euro NCAP pedestrian crossing CPFA-50 test scenario. In addition to the evaluation indicators of the Euro NCAP regulations, parameters such as the distance from the AEB system to the pedestrian after braking, the warning time TTC, the time interval between the warning and emergency braking, and the maximum deceleration were introduced, Through the analysis of the emergency braking process of the AEB system of the sample vehicle and the monitoring of the driver’s heart rate, the advantages and disadvantages of different sensing schemes are finally analyzed, and the performance and comfort of the AEB system are evaluated.
automatic emergency braking (AEB) system; early warning TTC; comfort; deceleration change rate; test evaluation
10.15916/j.issn1674-3261.2022.04.002
U492.3;U463.6
A
1674-3261(2022)04-0218-05
2021-09-18
科技部重点专项3.2项目(2018YFB0105100)
苏占领(1990-),男,河南周口人,高级工程师,硕士。
责任编辑:陈 明
猜你喜欢
汽车实用技术(2022年16期)2022-08-31 07:01:16
车主之友(2022年4期)2022-08-27 00:58:12
汽车实用技术(2022年14期)2022-07-30 06:13:42
汽车实用技术(2022年10期)2022-06-09 11:16:54
汽车实用技术(2022年4期)2022-03-07 06:07:20
意林(2021年5期)2021-04-18 12:21:17
经济技术协作信息(2020年30期)2020-02-28 17:32:10
扬子江(2019年1期)2019-03-08 02:52:34
小天使·一年级语数英综合(2017年6期)2017-06-07 23:51:16
公民与法治(2016年4期)2016-05-17 04:09:26