“人路协同”环境下基于机器视觉的视障导识系统设计
2022-09-18 06:43王宸璐刘华胜杨雨菁姜宇豪徐佳婉
交通科技与管理 2022年18期
王宸璐,刘华胜,杨雨菁,姜宇豪,徐佳婉
(吉林大学,吉林 长春 130022)
0 引言
智能交通系统(ITS)是综合运用信息技术、数据通信技术、传感器技术、电子控制技术以及计算机技术等先进技术加强车辆、道路和使用者三者之间的联系,从而形成一种保障安全、提高效率、改善环境、节约能源的综合运输系统。目前智能交通系统主要针对车辆等载运工具与其他道路基础设施的联系,行人角度考虑较少,对视障人士的出行关注更少。视障群体由于自身限制,获取周边路况信息的能力低,较难应对实时变化的车流路况,因而更需要外界的辅助引导,实时获取前方人、车、路、环境的信息对其出行有极其重要的作用。
目前针对视障群体的智能化研究主要集中在导盲设备领域,包括智能盲杖、移动式机器人和穿戴式导盲设备等,通过搭载多种传感器和单片机芯片处理系统,实现障碍预警、语音提醒、GPS定位导航、摔倒检测等功能。朱爱斌等[1]用多图像传感器进行 3D 场景重建,配合用户腰部和脚腕处的超声波传感器检测障碍物。Bai J& Lian S & Liu Z[2]设计的导盲眼镜集成了超声波测距仪、深度摄像机和鱼眼摄像机,根据采集的信息利用 A*算法生成感兴趣的点分布图,规划出全局最短路径,实现基于动态目标选择策略的虚拟盲道跟踪方案。盲人出行系统方面,彭琳钰等[3]提出了一种基于深层卷积神经网络的智能导盲终端系统,能够对在复杂环境中常见障碍物的种类及当前场景、警示标志实现准确识别。当前针对导盲领域的智能化研究主要是在现有环境条件的基础上,利用先进技术识别获取周围环境的障碍物等信息,通过多种方式传递给使用者,但缺乏外界环境的改进研究。
该文在智能交通系统的背景下提出智能人路协同系统IPICS(Intelligent Pedestrian Infrastructure Cooperative Systems),并针对视障群体构建了“人路协同”环境下基于机器视觉的视障导识系统,从盲道和标志标线设计入手,借助先进技术为视障群体提供更为详尽的实时道路信息,对视障群体的安全保障和推进无障碍环境建设提供支撑。
1 智能人路协同系统及基于机器视觉的视障导识系统框架
1.1 智能人路协同系统
基于“智能车路协同系统(IVICS)”概念,该文结合人、路之间的交通特征以及新一代网络技术等提出“智能人路协同系统(IPICS)”概念,简称人路协同系统。该系统是针对目前智能交通系统(ITS)中所缺失的行人相关方面,将车路协同拓展到人路协同,加强行人与道路之间的联系,从而形成的一种保障安全、便利出行、高效畅通的信息化智能化行人出行系统。
智能人路协同系统(IPICS)基于“以人为本”的设计理念,从服务行人角度出发,采用传感探测、机器识别、无线通信、互联网等多种先进技术,实时获取行人行进路径、位置信息、道路拥堵状况等信息,并通过多渠道进行信息传输交互,实现对人、车、路信息的全面感知,以达到行人与基础设施、行人与行人之间智能协同配合,人人、人路之间多层次全方位动态实时信息交互的效果,并在所获取信息的基础上进行处理分析,从而最大程度利用行人和路况信息,优化利用系统资源、提高行人出行效率、降低危险事故发生可能性。
1.2 基于“人路协同”的视障导识系统框架
非视障群体可以通过视觉直接感知周围环境信息,从而直接建立人—人、人—路之间的联系,但视障群体很难全面感知道路行人信息和实时路况信息。因此,该文基于“人路协同”环境,针对视障群体建立了视障导识系统,如图1所示。

图1 “人路协同”环境下基于机器视觉的视障导识系统
该系统由无障碍基础设施、智能导盲设备、云端无线通信三个层次构成,以现有无障碍设施为基础,基于机器视觉技术进行视障导识设施设计,为智能导盲设备提供易于识别感知的外界环境。智能导盲设备作为中间层,通过机器视觉等先进技术对出行环境及导识设施所提供的信息进行识别感知,并与云端数据层进行无线通信,通过信息交互多维度获取道路、行人等实时信息,最大限度辅助视障群体全方位感知道路信息。
目前智能导盲设备以及云端无线通信方面都已有较为深入的研究,相关技术如机器视觉、深度学习、大数据、无线通信等也已经较为成熟,但受制于现行环境无障碍基础设施的限制,不能够较好地发挥作用,无法形成完整系统的智能人路协同环境。故该文主要针对无障碍导识设施进行优化设计,包括盲道、视障群体标志和标线设计。
2 视障导识设施设计
2.1 设计内容
现阶段我国无障碍基础设施主要指盲道,视障者行走时通过触觉感知环境信息。虽然我国无障碍环境建设方面有一定的法律、规范等制度保障,但仍然存在难以辨别方向、缺少提示信息、衔接不畅、铺设不合理等问题。一方面由于现行《无障碍设计规范》[4]中针对盲道的相关标准存在不足:提示盲道砖单一,不能够提示多种场景;具体铺设连续长度、缓坡处理、以及曲线系数等铺设相关要求没有明确强制性标准;缺乏与公共交通、公共设施等的衔接;缺乏针对视障群体的标志标线设计。另一方面,现状盲道铺设不规范,随意性强,无人监管,缺少法律约束,社会对此不够重视。该文根据“人路协同”的视障导识系统要求,针对现有导盲系统的不足进行优化设计,包括三个方面:
(1)盲道优化设计。包括行进盲道的优化设计及指示盲道的补充设计。
(2)导识标线设计。解决盲道断口的衔接以及不易辨别方向的问题。
(3)导识标志设计。用以解决与公共交通、公共设施等场景的引导衔接问题。
通过盲道与导识标志标线相结合,借助机器视觉深度学习技术进行辅助识别感知,从而解决视障群体出行困难,保障其安全出行。
2.2 设计依据
基于机器视觉的检测识别原理,该文从两方面进行系统设计。一是颜色形状设计,导识设施选取鲜明且对比度强烈的颜色,便于色彩空间的阈值分割,提高分割准确度;采用常见的具有明确轮廓的几何形状,便于边缘检测提取,从而准确识别。二是类型设计,从深度学习神经网络训练角度,为使数据集精简化易于收集,在具体设计时采取归类设计的原则,大类标识统一标准,辅助以具体标识标注,从而避免因标识类型过多过杂而难以获得充足大量不同环境的训练数据。
2.3 设计方案
2.3.1 盲道优化设计
现行盲道设计存在行进盲道颜色单一,易受光照遮挡等影响识别准确度;提示盲道指示信息单一,缺乏对路口具体类型、台阶等特殊场景的提示等不足,不能够给视障群体提供充足准确的信息。针对这些问题,该文依据机器视觉识别检测原理以及人体感知机理,通过采取鲜明颜色对比和改变凸起形状,对盲道进行优化设计,如图2所示,从而解决行进盲道识别边界分割易受光照遮挡等影响,指示盲道单一提示信息有限的问题,以便于视障者自身感知和机器视觉检测识别。具体设计详解见表1。
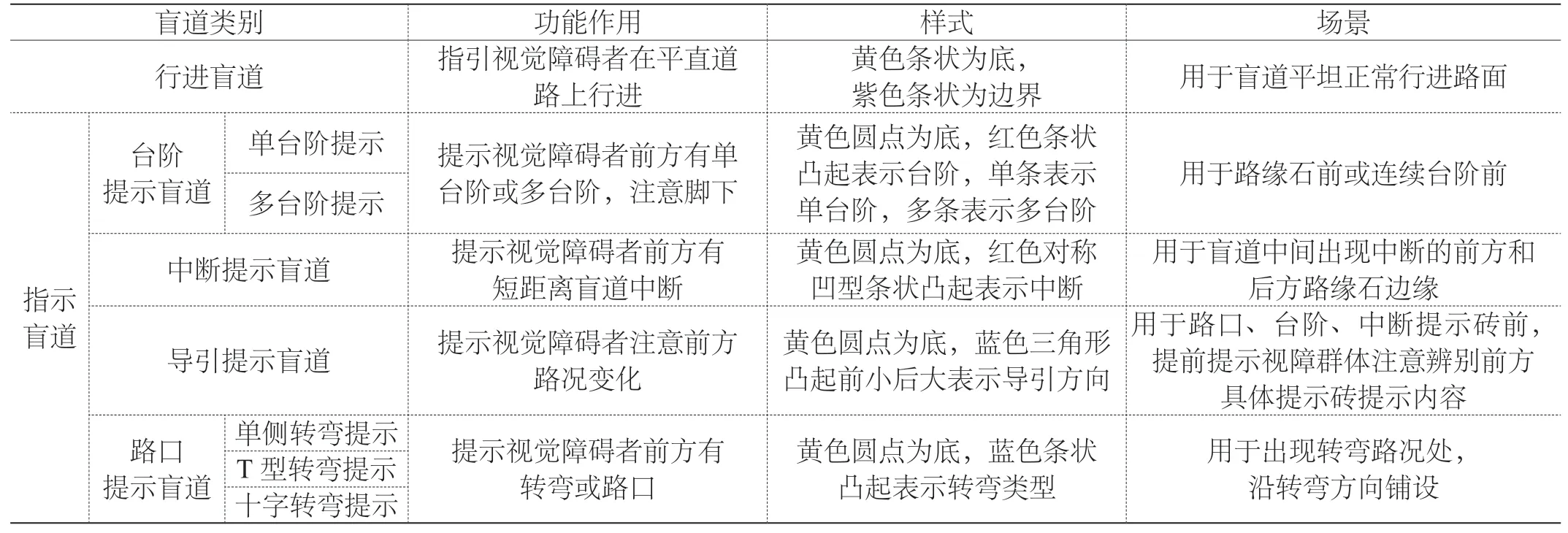
表1 盲道优化设计详解
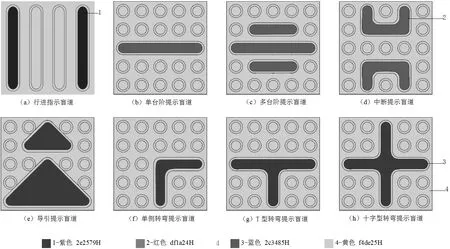
图2 盲道优化设计示意图
2.3.2 导识标线设计
导识标线设计主要用于未被盲道覆盖的区域,以解决视障群体出行的“最后一公里”衔接问题。针对视觉障碍者出行过程中存在的衔接及提醒缺失等问题,共设计四种类型标线:行进标线、连接标线、警告标线和禁止标线。为了与现有道路标线进行区分且便于机器视觉识别,采用了紫色和黄色两种底色作为标线的颜色,以不同的线形表示不同的功能,设计及详解见图3和表2。

图3 导识标线设计示意图(单位:mm)

表2 导识标线设计详解
2.3.3 导识标志设计
交通标志通过图形符号、颜色和文字向交通参与者传递特定信息,由于视障群体本身不能够通过视觉进行标志的感知识别,故导识标志的作用主要基于机器视觉深度学习方法检测识别来实现。由于机器视觉深度学习的交通标志识别难点在于数据集有限,为简化数据集,避免所需数据集过于繁杂不易收集,该文采取分类标志的设计方法,对需要提示引导以及警告禁止的常见场景进行归类,每一大类设计统一标志,具体场景信息通过辅助标志加以注明,从而达到“一步准,二步精”的效果。具体导识标志设计包括三种标志类型,共7个大类20个场景,如图4所示,设计详解见表3。

表3 导识标志设计详解

图4 导识标志设计示意图
3 新型导盲系统实施建议
虽然新型盲人系统的可行性较好,但在具体实施的过程中还需要注意以下情况:一是盲人标识系统的更新,对现有盲人标识系统的重新设计和更新是该新型盲人系统成功实施的前提;二是智能导盲设备的推广,导盲设备是视障者的“眼睛”,智能导盲设备的推广是该系统成功实施的背景要求;三是导盲设备、行人以及车路环境联结成网,实现信息实时更新、精确计算、合理规划;四是提前规划、逐步投入、有序建设,做到现有设施与新型导盲设施的有效衔接。
4 总结
该文基于智能人路协同系统提出了智能人路协同系统(IPICS),在“人路协同”环境下,构建了由无障碍基础设施,智能导盲设备及云端无线通信三个层次构成的视障导识系统框架。该系统通过机器视觉进行环境感知并与周围人、车、路进行实时通信,辅助视障群体全方位实时获取出行相关信息。在此基础上,依托机器视觉识别感知技术原理对盲道和针对视障群体的导识标志标线进行了优化设计,解决了现行盲道指示信息有限、出行途中缺乏衔接引导等问题。该文所提出的智能人路协同系统及视障导识系统符合现今智能交通发展趋势,充分考虑了弱势群体出行场景,具有较好的应用价值。
猜你喜欢
玩具世界(2022年3期)2022-09-20
山西交通科技(2022年3期)2022-08-02
客联(2022年3期)2022-05-31
中学生数理化·中考版(2021年9期)2021-11-20
青少年日记·小学生版(2019年2期)2019-09-02
西南交通大学学报(2018年6期)2018-12-18
测控技术(2018年10期)2018-11-25
中国公路(2017年14期)2017-09-26
小主人报(2016年2期)2016-02-28
中学科技(2015年8期)2015-08-08