
低照度下平面图像舒适色度范围测定方法
2022-09-13 09:48陈晨,梁霄
吉林化工学院学报 2022年5期
陈 晨,梁 霄
(1.六安职业技术学院 人文艺术学院,安徽 六安 237158;2.青海警官职业学院 警用装备实战训练处,青海 西宁 810000)
低质量、较模糊的图像会给受众带来较大的视觉不适,随着受众主观感受的加深,不仅会对其造成心理上的不适,还会阻碍受众对客观事实的判断[1].因此,相关的图像质量优化方法成为学者的研究重点.色度是衡量图像带给受众的主观感受是否舒适的重要指标,如果能对其范围进行准确测定,将有利于准确提升相应的图像质量[2].
赵云秀等提出了基于舒适度的图像感知距离估计方法[3],该方法针对立体图像建立了感知距离,从中计算和分析立体深度与视觉舒适度之间的关系.常永莉等研究了基于显著区域的舒适度范围测定方法[4],该方法结合视觉注意机制和逐级逼近法,定量研究了饱和度因素对立体图像视觉舒适度的影响.上述方法使人们观察到的图像的舒适度得到了显著提升,减少了由于颜色以及亮度差异带来的不良效果.但是,在实际生活中经常存在低色度、低饱和度的低照度图像,上述两种方法在此种条件下,对图像舒适度的测定误差较大,无法满足实际图像工作中对舒适度的要求[5].
综上所述,本文在考虑图像低照度影响因素情况下,通过建立低照度平面图像增强去噪模型和相关算法求解分析,完成平面图像舒适色度范围测定.实验结果表明,所提方法为图像舒适度的调整提供可靠依据,更好地满足实际生活与工作中人们对低照度平面图像的视觉需求.
1 低照度平面图像舒适色度范围测定
通过回归分析理论与低照度下平面图像物理模型实际情况相结合,建立低照度平面图像增强去噪模型对其进行去噪,改善图像模糊现象,提高图片清晰度,并对优化后的低照度平面图像进行舒适度范围的测定.
1.1 低照度图像增强去噪
1.1.1 增强去噪模型建立
在回归分析中将观察对象、影响因素以及随机误差之间的关系,用公式表述为:
Yi=μ(Zi)+εi,i=1,…,n.
(1)
式(1)中,观察对象用Y表示;对观察对象Y产生影响的因素用Z表示;i表示观察次数;μ(·)表示回归模型.
在低照度平面图像实际处理过程中,会受到各种因素的影响,使图像不符合参数化的回归分析,因此需要通过非参数化回归分析方法对其进行分析[6].在本文中,选取核回归分析方法对低照度下的平面图像进行分析,该方法对于二维低照度下的平面图像而言,具有较高的分析精度.将核回归的通用数据模型用公式表示为:
Yi=z(xi)+εi,∀xi∈ω,i=1,….,N.
(2)
式(2)中,像素点的二维坐标用(xi,yi)表示;在xi角度看到的像素值用yi表示;回归函数用z(xi)表示;独立分布的随机噪声用εi表示,且εi的平均值为0;ω表示局部分析窗口,在ω中拥有采样点,并且其中心位置为(xi,yi).各采样点在分析窗口中的距离不固定,随机噪声εi不需要一一满足特定的分布形式,为了达到将低照度下平面图像的物理模型应用到核回归模型中的目的[7],假设各采样点的间距都是固定的,将核回归模型改写为下面公式:
Y(xi)=z(xi)+n(xi),∀xi∈ω,i=1,….,N.
(3)
在回归函数z(xi)中,假设其N阶的状态是局部平滑的,则低照度下平面图像的感兴趣点可以通过N阶局部泰勒级数对其进行估量,用公式可以表达为:
(4)
式中,梯度算子和Hessian算子分别用∇和H表示.
在二维图像中,待估计位置的近似像素值用β0=z(x)表示;回归函数z(xi)中的一阶偏导数向量用β1表示,二阶偏导数向量用β2表示.满足:
β1=∇z(x),(5)
(6)
若将式(4)看成低照度图像在局部范围的回归函数,像素点的权重根据各点之间的距离由核回归函数进行分配,则可用加权最小二乘来解决低照度图像中存在的噪声.公式为:
(7)
式中,采样点的个数与回归阶数分别用p、N表示;核函数用KH(xi-x)表示,有:
(8)
式中,平滑矩阵用H表示,可对低照度下平面图像的平滑度进行控制.如果用高斯函数表示核函数,则公式可以写成:
(9)
通过将低照度平面图像的反转物理模型与式(3)的核回归模型结合,可以用求解最优化问题的方式对低照度下平面图像进行增强去噪[8].在模型中,回归阶数N一定程度上决定信号估计的准确性与难易程度.在实际的去噪过程中,回归阶数过高,会导致求解难度加大,无法满足低照度平面图像的去噪要求.因此本文选择常数回归模型建立低照度平面图像增强去噪模型.将低照度反转图像采取0阶回归阶数应用于核回归模型,得到低照度平面图像增强去噪的目标函数[9]:
(10)
1.1.2 增强去噪模型求解
在求解低照度下平面图像增强去噪模型时,需要对平面图像的场景信息进行复原,并将核函数的具体表达形式确定出来[10].选取自适应核函数求解增强去噪模型,原因是自适应核函数综合考虑像素空间与值域距离与权重之间的联系[11].将其转化成最优问题可以用公式表示为:
Kadapt(xi-x,yi-y).
(11)
对于自适应核函数而言,通过(xi,yi)的像素灰度值可以确定其领域像素权重,使得原始的低照度平面图像的纹理细节、边缘信息得以保留.其权重满足双边滤波算法中关于权重的表述:
Kbilat(xi-x,yi-y)=gd(xi-x)gr(yxi-yx).
(12)
式中,空间域权重用gd(xi-x)表示;值域权重用gr(yxi-yx)表示.
低照度平面图像的平滑度通过空间域权重与值域权重的尺寸确定.当低照度平面图像在高噪声情况下,即使采用了双边滤波求解核函数,图像仍然会出现模糊不清的现象[12].因此本文采用联合双边滤波算法,通过较低水平导向图优化滤波算法,为低照度平面图像增强去噪.用导向图的方式可以将值域函数表示为:
(13)
式中,导向图在x处的像素值应用Gx表示,空间域权重尺寸用σ表示;值域权重尺寸用γr表示.
根据联合双边滤波算法可将式(10)的低照度平面图像增强去噪目标函数的核形式表示为:
Kjiontbilat(xi-x,yi-y)=gd(xi-x)gr(Gxi-Gx).
(14)
低照度平面图像增强去噪目标函数用公式表示为:
gd(xi-x)gr(Gxi-Gx).
(15)
(1-tk-1(xi))]2,
gd(xi-x)gr(tk-1(xi)-tk-1(x)).
(16)
gd(xi-x)gr(Jinvk-1(xi)-Jinvk-1(x).
(17)
求解式(16)、(17),并联合双边过滤算法尽管能有效去除噪声,将图像的边缘保留,但其同样具有局限性,在迭代过程中,会造成图像信息中的一些细节损失[13],因此想要获得更理想的增强去噪效果,需要在其进行滤波迭代计算后,对其进行细节补偿.由于熵值图像不受光照作用影响,本文在对场景光的细节补偿中,采用熵值图像补偿方法[14].在迭代次数为k时的熵值细节图像求解可通过下式完成:
(18)
式中,用JinvkDetail(x)表示熵值细节图像.其可以反映出当前迭代中损失的低照度平面图像细节信息.由于低照度平面图像中大量噪声信息的存在,熵值图像中可能存在虚假的噪声细节信息.将常数ε应用于式(18)降低噪声,修正JinvkDetail(x).有:
JinvkDetail(x)=(1-M)JinvkDetail(x)Jinvk(x)+MJinvk(x).
(19)
式中,平衡细节图像所占权重用M表示.修正后的低照度平面图像,除了可以增强图像清晰度外,同时也避免了产生大量的光晕效应.
1.2 舒适色度范围测定
在对低照度平面图像进行增强去噪优化之后,虽然使低照度图像整体视觉效果得到改善,但由于图像效果会受多种因素影响,为了使其视觉效果更理想,还需对其视觉上的舒适度进行合理调整[15].因此需要对低照度平面图像的舒适度范围进行测定,以便进行图像舒适度调整.具体的舒适度范围测定流程为:
(1)将低照度平面图像的颜色空间由RGB转化为HSV,并将图像色度中的显著部分与非显著部分分离出来,用灰度图像遮盖图像色度中的非显著部分,该过程可改变低照度平面图像的整体对比度、彩色的鲜艳程度,具体转换流程如图1所示.

图1 低照度平面图像颜色空间转换流程
(2)采用不同的步长对图像的平面显著图的左右视图色度进行转换.得到若干左视图与右视图,并将其组合成不同的待测显著平面图像.


(7)继续对(6)中的显著平面图像进行主观评分,得到符合舒适度要求的显著平面图像右视图的最大、最小色度值n3rup、n3rdown.
2 实验与论证
以某学院提供的平面图像为实验对象.由30名通过专业眼科医院检查视力合格的实验研究人员在低照度环境下对平面图像进行舒适度范围测定,并将测定结果作为标准舒适色度范围,对本文方法的平面图像舒适色度范围测定效果进行验证.
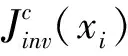
图2是从平面图像数据库选取的3幅用于实验的低照度平面图像.
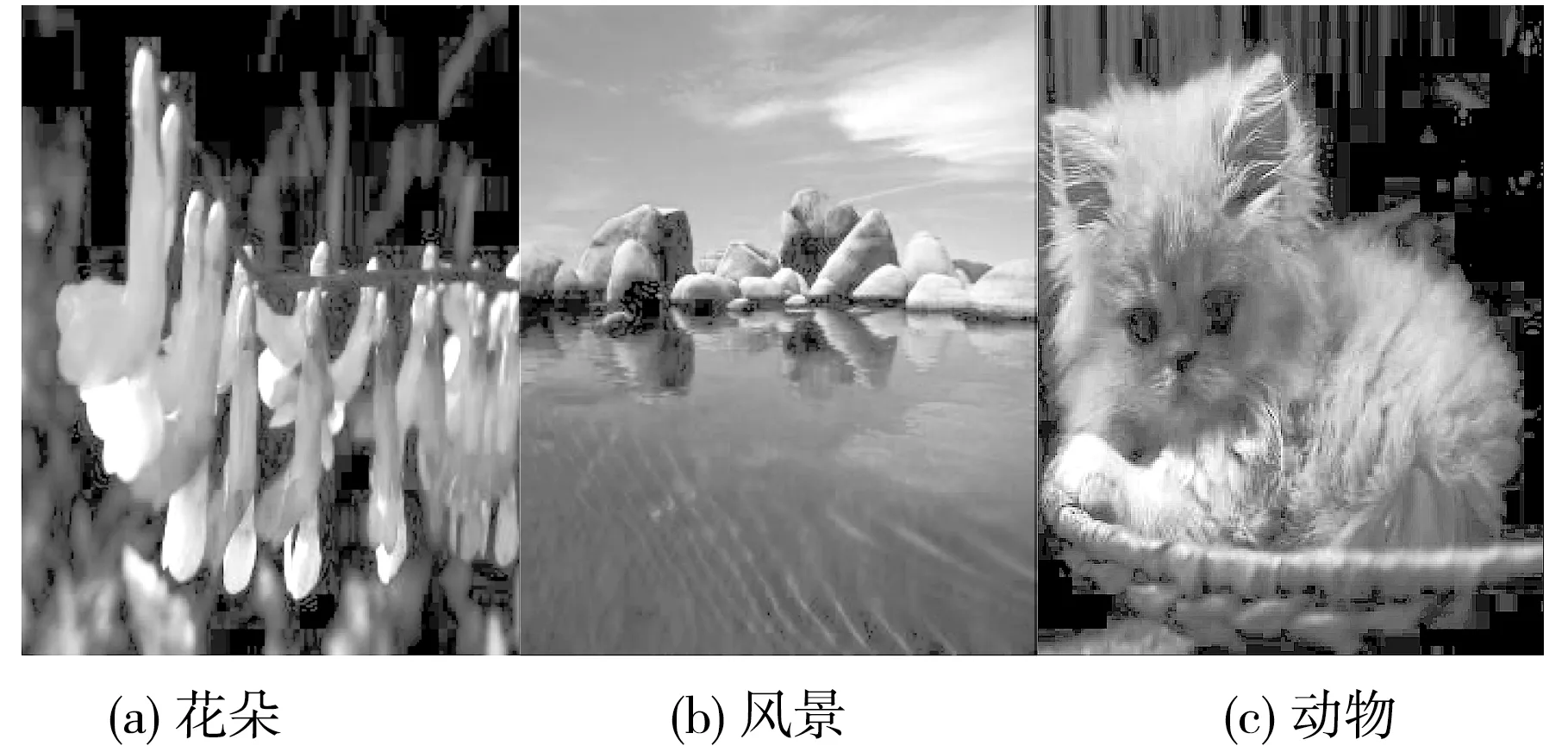
图2 实验平面图像
图3是应用本文方法进行增强去噪操作后得到的3幅图像.
图3 增强去噪后平面图像
综合图2、图3可以看出,原始实验平面图像存在光线过暗、细节纹理处理不当,存在边缘或细节处模糊现象,而经过本文方法对其进行增强去噪后,平面图像变得更为清晰,边缘处与细节处无模糊现象或模糊现象减轻.说明应用本文方法对低照度平面图像增强去噪,可实现对低照度平面图像的优化,去噪后的图像纹理清晰,能够满足后续对其进行舒适色度范围测定的需求.
表1是应用本文方法与文献[3]基于立体舒适度的立体图像感知距离估计方法、文献[4]基于显著区域的舒适度范围测定方法,对低照度下风景(图1(b))平面图像进行增强去噪时的平均峰值信噪比对比表.

表1 图像增强去噪平均峰值信噪比(dB)
从表1可以看出,应用本文方法后的平均峰值信噪比与文献[3-4]方法相比更高,RGB 3个通道的平均峰值信噪比达到60dB以上.说明应用本文方法对低照度图像进行去噪增强后,图像更加真实,更能满足实际工作中对图像失真率的要求.
图4是应用本文方法得到的3幅增强去噪平面图像的舒适度匹配图.横轴为左视图色度值,纵轴表示右视图色度值.分段直线包围的区域表示在此区域的图像给观看者的感觉是舒适的.
从图4可以看出,应用本文方法成功实现了对平面图像舒适色度范围的测定.在得到图像舒适度匹配图中,花朵舒适度匹配图中的分段直线包围区域最大,其次是动物,然后是风景.说明在同样的条件下,花朵图像给人的视觉感更好,舒适度更强.

左视图色度值/°

从图5可以看出,应用本文方法测定低照度图像舒适色度时产生的误差更低,均保持在5%的范围内.而其他两种方法在进行舒适色度范围测定时的误差都接近或在10%以上.说明应用本文方法进行舒适色度范围测定误差率更低、测量更准确,更能满足实际工作需求.

图5 不同方法舒适色度范围测定误差
3 结 论
对低照度下平面图像的舒适色度范围进行测定,并将其用于增强低照度平面图像的视觉效果,能够反映低照度下平面图像的舒适度,给人更好的视觉感受,为图像处理领域对于低照度下平面图像的处理提供了可靠依据与研究的新途径.但是影响图像舒适度的因素有很多,而本文只从像素方面单一地对平面图像的舒适度进行了色度范围测定与研究.因此,下一阶段将从其他影响因素着手对低照度下平面图像的舒适色度进行研究.
猜你喜欢
磷肥与复肥(2022年2期)2022-03-24
保鲜与加工(2021年8期)2021-09-08
燃气涡轮试验与研究(2021年6期)2021-08-01
辽东学院学报(自然科学版)(2021年1期)2021-03-12
海洋信息技术与应用(2020年4期)2021-01-18
酿酒科技(2019年7期)2019-07-30
中国生物医学工程学报(2019年5期)2019-07-16
北京航空航天大学学报(2017年3期)2017-11-23
照明工程学报(2017年3期)2017-07-10
中国生物医学工程学报(2017年6期)2017-02-10
