
ADS-BIN在二次雷达系统中的应用
2022-09-09 02:16陈伟巫文俊邹亮
电子技术与软件工程 2022年11期
陈伟 巫文俊 邹亮
(四川九洲空管科技有限责任公司 四川省绵阳市 621000)
二次雷达主要用于空中交通管制,通过二次雷达询问,可以获得目标的距离、方位,目标的气压高度,目标的飞机代码等信息。在二次雷达询问系统中引入ADS-BIN,通过解析数据链中的位置报文、速度报文等,可以获得飞机的位置、速度、航班号等信息。
1 系统组成
二次雷达系统一般包含天线系统、询问机(也称发射机-接收机)和应答信号处理器,其中应答信号处理器负责产生询问脉冲,发送到发射机,并对接收机送来的应答信号进行处理,对应答脉冲内的数据进行解码,同时完成对异步干扰和窜扰的滤波处理,再通过点迹处理和航迹处理,最后将目标报告送出。发射机主要负责产生一定功率的询问脉冲,通过射频电缆传送到天线向空中辐射。二次雷达组成框图如图1所示。其中应答信号处理器由三个模块组成:译码器、点迹处理器、航迹处理器。

图1:二次雷达系统组成框图
询问机按照和/差/控制波束的要求,对应包含和/差/控制通道,和通道负责辐射探测目标,控制通道负责抑制旁瓣目标,差通道与和通道配合使用,进行单脉冲测角。将ADS-BIN 引入二次雷达询问系统,通过使用控制通道接收飞机广播的ADS-BOUT 信号,同时更改应答信号处理器中的应答脉冲处理程序以及点迹处理软件和航迹处理软件,增加对ADS-BOUT 信号脉冲的提取处理和数据解析,在不更改硬件的情况下就可以实现对ADS-BOUT 信息的解析。
2 基于ADS-BIN目标提高二次雷达探测效果
基于ADS-BIN 目标提高二次雷达探测效果包含以下3个步骤。
2.1 SSR目标处理
SSR 目标处理包括译码处理、点迹处理、航迹处理。译码处理主要负责脉冲检测和脉冲提取;点迹处理主要完成单脉冲测角、测距、以及应答间的相关处理,最终形成点迹报告,点迹处理流程如图2所示;航迹处理包括航迹建立、航迹更新、航迹外推和航迹中止,航迹处理的流程如图3所示。
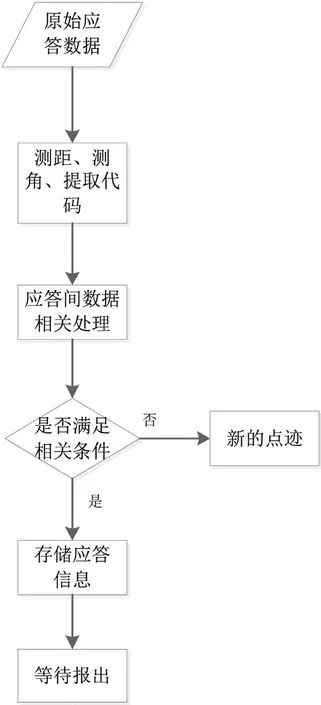
图2:SSR 点迹处理流程图
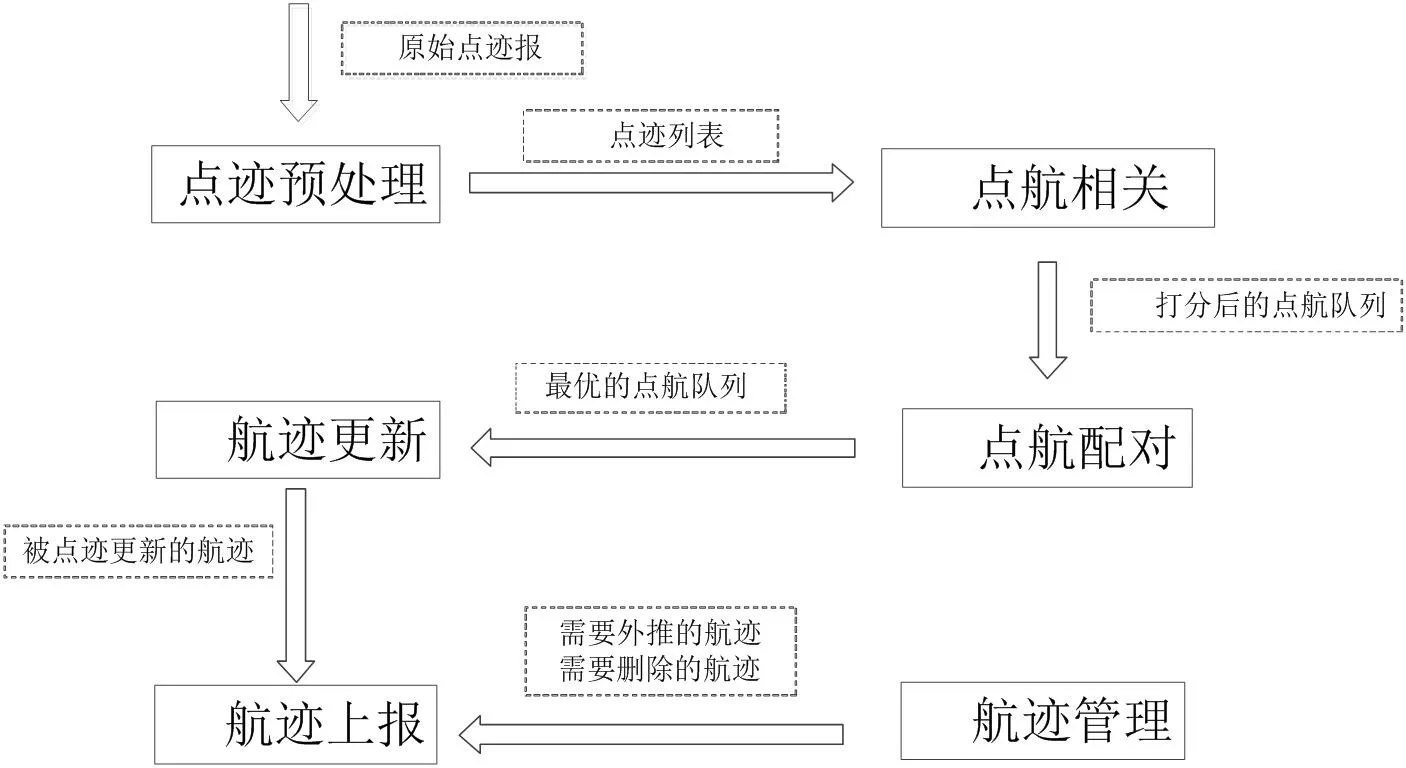
图3:SSR 航迹处理流程图
2.2 ADS-BIN处理
ADS-BIN 处理流程如下:
(1)实时获取飞机广播的ADS-B IN 消息,对接收通道的信号进行解码和分集处理,得到112位原始ADS-B报文;
(2)根据ADS-B 目标位置报文中的编码位置信息,通过航迹的建立、跟踪处理获取实际的位置。位置信息更新航迹流程如图4所示。
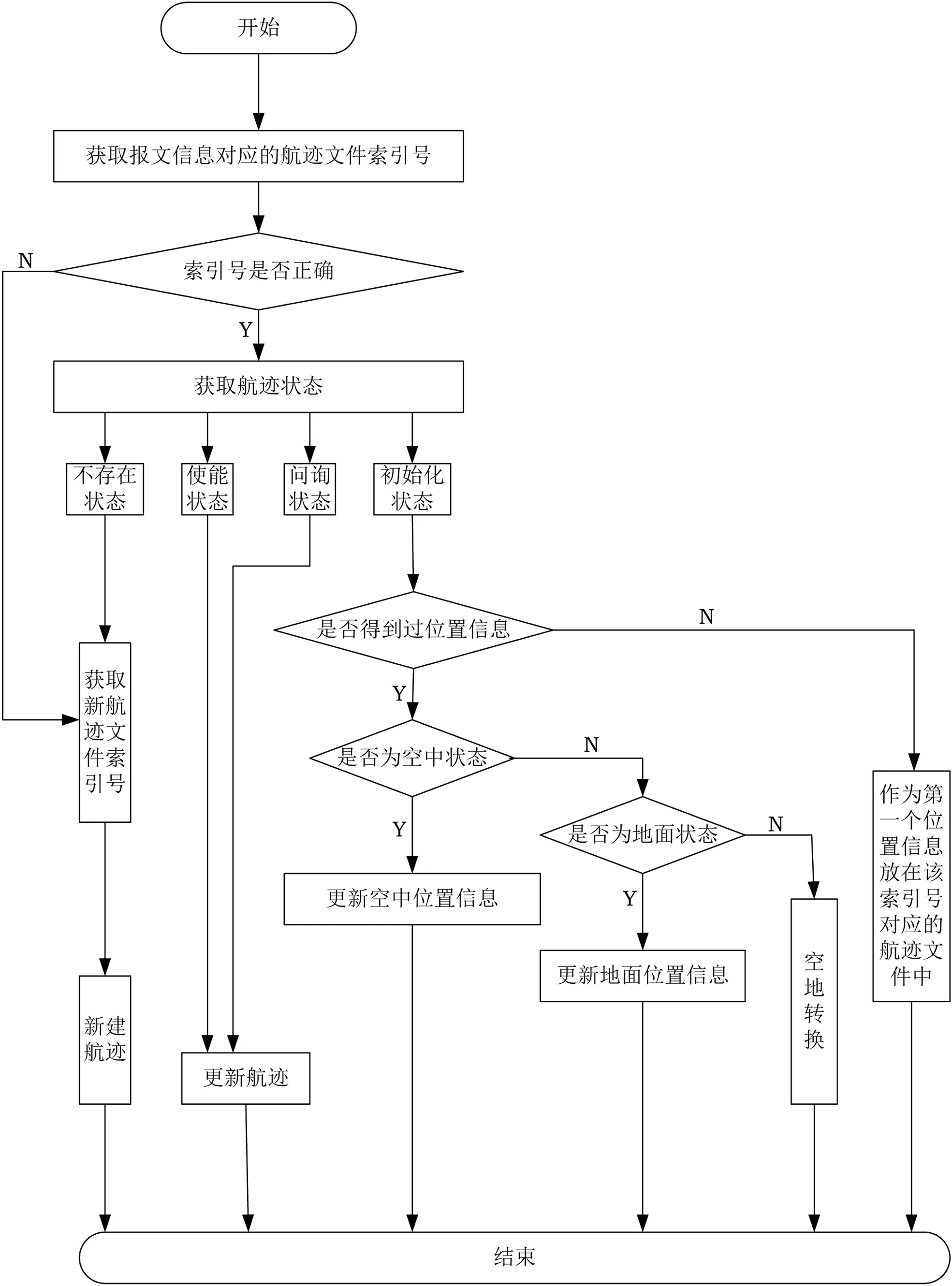
图4:位置信息更新航迹流程图
(3)对目标航迹状态进行周期维护,包括航迹初始化、速度更新、位置更新、航迹整理、航迹跟踪。
ADS-BIN 目标位置处理流程如下:
(1)解析ADS-BIN 消息,获取编码位置消息;
(2)提取S 模式地址信息,根据S 模式地址匹配ADS-B 航迹队列,匹配成功,判断ADS-B 航迹状态,如果为使能状态或者问询状态,则结合当前编码位置信息以及ADS-B 航迹文件进行本地解码,解算目标位置,更新ADS-B 航迹队列;
(3)如果ADS-B 航迹状态为初始化状态,则判断当前编码位置信息的奇偶属性与ADS-B 航迹文件中的位置奇偶属性是否不同,若不同则进行全球解码,解算目标位置,更新ADS-B 航迹队列,若相同,则等待后续编码位置信息进行全球解码。
(4)为了保证ADS-B 位置信息的准确性,在进行全球解码时,需要判断解算出来的位置与二次雷达站点位置距离差,结合系统ADS-BIN 的最大探测距离,如果距离差大于系统最大探测距离,则当前解码无效;在进行本地解码时,需要计算新解算出来的目标位置信息与ADS-B 航迹文件中的目标位置信息的距离差,若目标在30S 内距离差大于6 海里,则认为此次解码无效。
2.3 ADS-B目标与SSR目标融合
通过判断ADS-B 目标与SSR 目标的相关性,判断两者是否为同一目标,相关成功后,使用ADS-B 目标信息对SSR 目标信息进行修正。SSR 目标信息修正包括:位置修正、速度修正、航向修正。SSR 目标与ADS-B 目标相关上后,SSR 目标的位置信息、速度信息、航向信息均使用ADS-B目标的位置信息、速度信息、航向信息。ADS-B 目标与SSR 目标融合的处理流程如图5所示。
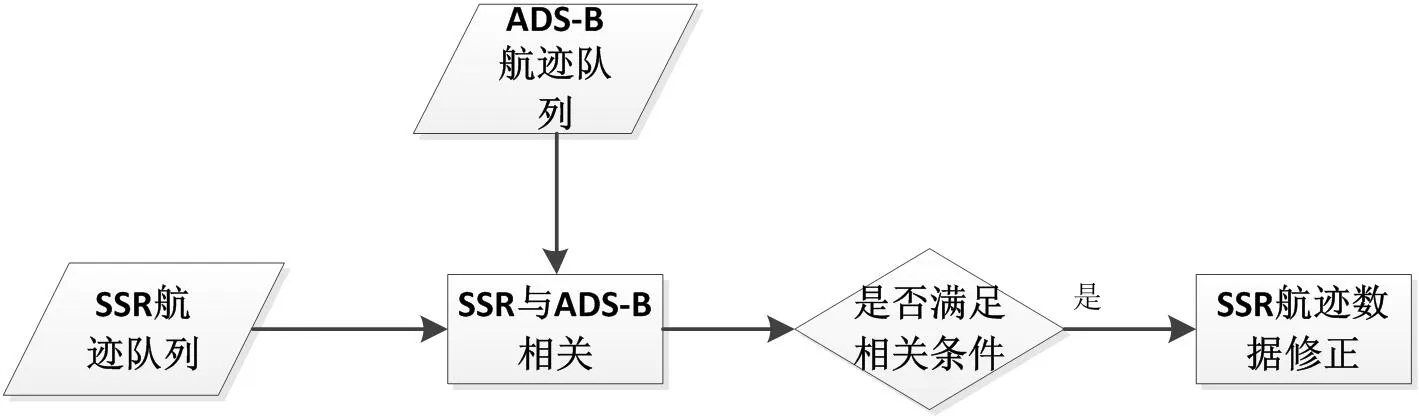
图5:ADS-B 目标与SSR 目标融合处理流程图
SSR 目标与ADS-B 目标的相关分为距离相关、高度相关、时间相关、速度相关、航向相关、S 模式地址相关。由于ADS-B 目标获取到的是飞机的大地坐标,SSR 目标获取到的是目标的极坐标,在进行距离相关时,需要将飞机的ADS-B 信息的大地坐标经过坐标变换为极坐标。
距离相关:计算出SSR 目标极坐标位置与ADS-B 极坐标位置的距离差,距离差小于距离相关门限,则判定为距离相关成功,否则判定为距离相关失败。不管是单脉冲测角还是滑窗测角,SSR 目标的方位与目标真实方位存在一定误差,误差大小和二次雷达系统测角精度有关。ADS-B 目标位置是基于飞机的GPS 位置测定的,位置精度极高。因此两者的距离相关门限设定值通常需要考虑二次雷达系统测角精度;
高度相关:当SSR 目标高度与ADS-B 高度同时有效时,需要进行两者的高度相关,计算出SSR 目标高度与ADS-B目标高度的高度差,高度差小于高度相关门限,则判定为高度相关成功,否则判定为高度相关失败;
时间相关:为了保证ADS-B 目标位置与SSR 目标探测位置是基于相同时间内进行的,需要进行两者的时间相关,计算出SSR 目标探测时间与ADS-B 目标探测时间的时间差,时间差小于时间相关门限,则判定为时间相关成功,否则判定为时间相关失败。由于SSR 目标更新周期与系统探测周期有关,ADS-B 目标更新周期基于机载应答设备ADSBOUT 广播周期,两者更新时机不同,通常SSR 目标的更新周期要大于ADS-B 目标的更新周期,因此时间相关门限一般要大于SSR 目标的更新周期;
S 模式地址相关:当SSR 目标S 模式地址有效时,需要进行两者的S 模式地址相关,若SSR 目标S 模式地址与ADS-B 目标S 模式地址相同,则判定为S 模式地址相关成功,否则判定为S 模式地址相关失败。
速度相关、航向相关只作为存在多个SSR 目标与ADS-B 目标相关时的一个辅助决策判断,距离相关、时间相关是SSR 目标与ADS-B 目标相关的必要相关条件,高度相关只在二者高度均有效时为必要条件,S 模式地址相关只在SSR 目标S 模式地址有效时为必要条件。
由于SSR 目标与ADS-B 目标位置精度上的差异,当航线上存在位置相近的多个飞机时,可能会存在相关错误的情况。为了解决错误相关,可以在连续几个探测周期相关上后,才进行SSR 目标与ADS-B 目标的融合,此外民航飞机为了保障飞行安全,多个飞机位置相近时需要保证飞机的高度差,因此高度相关可以有效解决多目标相关时错误相关的问题。
对于SSR 目标与ADS-B 目标的解融合处理,当SSR 目标与ADS-B 目标处于融合状态时,若当前周期相关失败,为了防止SSR 目标位置发生跳变,可以在连续几个周期相关失败再进行SSR 目标与ADS-B 目标的解融合处理。
3 基于ADS-BIN识别二次雷达虚假目标
虚景率是衡量二次雷达探测性能的一个重要指标,二次雷达探测的虚假目标主要分为旁瓣目标和多径目标。旁瓣目标通常由于二次雷达控制波束未能覆盖和波束的旁瓣,造成副瓣穿刺,穿刺后的旁瓣波束探测到旁瓣位置的目标,从而在主波束方向形成该目标的虚假目标。多径目标是由于山体或者建筑物等地理环境的反射导致二次雷达发射机和接收机之间存在多条路径,从而造成虚假目标。
目前二次雷达虚假目标是通过目标的航管代码以及幅度特性来进行识别,其中旁瓣目标与真实目标距离相近,方位存在较大偏差,航管代码通常相同,旁瓣目标幅度一般小于真实目标幅度。多径目标通常距离大于真实目标距离,航管代码通常相同,多径目标幅度一般小于真实目标幅度。因此在后端数据处理时,在同一个探测周期内,如果存在多个航管代码相同、高度相近的目标,可以认为其中幅度较小的目标为虚假目标。
通过目标航管代码以及幅度来进行,依赖于目标的幅度,如果二次雷达波束形成异常可能会导致旁瓣幅度过高,则旁瓣目标幅度和真实目标幅度接近;如果反射路径与正常接收路径距离差较小,导致反射信号与正常接收信号部分叠加,则多径目标幅度往往和真实目标幅度接近。此时通过目标幅度判断虚假目标的方法不再适用。基于ADS-BIN 识别二次雷达虚假目标是通过二次雷达目标与ADS-B 目标的融合来实现的,处理流程示意图如图6所示。
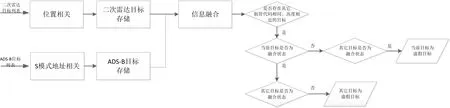
图6:SSR 虚假目标识别
3.1 识别可能的虚假目标
识别可能的二次雷达虚假目标包括:
(1)周期遍历二次雷达目标列表;
(2)查询是否存在多个航管代码相同且高度相近的二次雷达目标,将这些二次雷达目标标记为可能的虚假目标。
3.2 二次雷达目标与ADS-B目标相关
通过2.3 完成二次雷达目标与ADS-B 目标的融合,将融合上的二次雷达目标状态标记为融合状态,其余目标标记为非融合状态。
3.3 确定虚假二次雷达目标
通过3.1 标记出可能的二次雷达虚假目标,通过3.2 将确定二次雷达目标与ADS-B 目标的融合状态。查询可能的二次雷达虚假目标的融合状态,如果存在融合状态的目标,则该目标为真实目标,其余非融合状态的目标为虚假目标。
4 结论
在二次雷达询问系统中引入ADS-B 信息源,将二次雷达目标与ADS-B 目标进行信息融合,可以有效提高二次雷达系统的探测精度,当存在多个航管代码相同、高度相近的目标时,可以通过二次雷达目标是否能与ADS-B 融合来识别虚假的二次雷达目标。使用这种方法能够有效识别出虚假的二次雷达目标,减少二次雷达探测的虚警率。
猜你喜欢
中国石油石化(2022年12期)2022-07-16
舰船科学技术(2022年11期)2022-07-15
海军航空大学学报(2020年2期)2020-07-27
青年歌声(2019年12期)2019-12-17
中国外汇(2019年19期)2019-11-26
家庭影院技术(2018年11期)2019-01-21
家庭影院技术(2018年11期)2019-01-21
北京航空航天大学学报(2017年7期)2017-11-24
电子技术与软件工程(2017年12期)2017-07-05
北京航空航天大学学报(2016年6期)2016-11-16
