机电产品设计阶段数字孪生模型演化方法及应用
2022-09-08 08:13谢啊奋王建生康献民陈尧张迅黄光润李宏宇谢奕浩余宏志
机械工程师 2022年9期
谢啊奋,王建生,康献民,陈尧,张迅,黄光润,李宏宇,谢奕浩,余宏志
(五邑大学 智能制造学部,广东 江门 529020)
0 引言
数字孪生概念模型最早在2003年由美国Grieves教授[1]在美国密歇根大学的产品全生命周期管理课程上提出。直到2010年,“Digital Twin”一词在NASA的技术报告中被正式提出,并被定义为“集成了多物理量、多尺度、多概率的系统或飞行器仿真过程”[2]。2011年,美国空军探索了数字孪生技术在飞行器健康管理中的应用,并详细探讨了实施数字孪生的技术挑战[2]。陶飞教授[3-8]的研究团队在2016年至今探索了数字孪生车间的概念,提出了数字孪生车间五维结构模型和理论体系、数字孪生标准体系,产品开发设计框架。谭飏等[9]将数字孪生技术引入到袋式除尘器创新设计过程得到了满足用户需求的最终方案。张鹏等[10]将TRIZ与数字孪生技术结合应用于概念设计阶段,对概念阶段中产生的设计参数和失效参数进行了提取,并将参数的演化应用于数字孪生技术中,服务于复杂机电系统的全生命周期。目前,机电产品在设计阶段的数字孪生的研究和应用很少。
1 设计阶段数字孪生模型演化方法
针对机电产品动态需求适应性差、各设计阶段离散、设计周期长等问题,在设计理论与方法论创新的基础上和特定需求前提下,针对目前设计阶段数字孪生的研究和应用很少,为了将数字孪生技术运用于机电产品设计阶段,提出了一种机电产品设计阶段数字孪生模型演化方法,如图1所示。该方法将数字孪生技术的概念和研究方法映射在机电产品设计阶段的全过程,将机电产品设计阶段数字孪生模型划分为4个阶段,即需求模型、概念方案域、结构设计域和参数分析域,并展开进行了研究。

图1 机电产品设计阶段数字孪生模型演化方法
首先,根据企业需求、机电产品工况等进行分析,采用基于模型的系统工程思想和SYSML系统建模语言建模需求模型,通过需求模型翻译和表述构建的功能模型建立SYSML的机电产品模块定义图,以形态学矩阵方式组合构成概念方案域的多种方案解;通过基于价值函数的层次分析法,在功能模型和形态学矩阵的基础上构建了混合的方案评价模型。在原有的层次分析法过程中,采取指标价值函数的方式对两个因素进行比较,提高了层次分析法的客观性。评价选出概念方案域中最优概念模型。其次,在结构设计域阶段,根据概念模型绘制机械结构简图并进行详细计算,采用CAD软件设计了各部分装置三维结构,得到了机电产品结构模型;通过基于灰色关联度的层次分析法,评价了结构设计域方案,并进一步完善结构模型。然后,在参数分析域,对分析不同条件下机电产品的静动态特性分析,得出分析数据,如总变形、等效应变、等效应力和固有频率,以及速度、位移、加速度等数据。在这些参数分析基础上建立了参数分析域的评价指标和标准。采用了基于专家知识的BP神经网络算法,以专家对于构建参数分析域的指标知识经验作为神经网络的输入层,进行神经网络计算。根据构建的参数域的评价指标体系,采用专家知识的神经网络算法,对机电产品参数分析域的参数模型进行评价,在评价得分满足需求模型要求下制造物理样机。
1.1 需求模型
区别于传统文本型的表达语言,基于模型的系统工程MBSE(Model-Based Systems Engineering)能够保证数据的可追溯性,能够将需求内容图形化地表达出来,特别是当下由于学科交叉而使得设计对象变得复杂和规模化。为了满足MBSE在实际工程中运用需要,国际系统工程学会(INCOSE)推出一种标准的系统建模语言SYSML(Systems Modeling Language),它是一种表述、分析、设计及验证复杂系统通用图形化建模语言,包括软件、硬件、信息、人员等系统需求分析、系统设计、功能描述、系统验证[11]。SYSML语言通过图形来描述涉及系统全生命周期的需求、设计、分析、验证等活动,通过系统需求、性能和功能分析进行进一步的系统全方位设计,有效进行系统架构和多域建模数据管理。系统工程演变过程中,基于模型的系统工程相对于传统系统工程有着系统客观性高、多学科协同融合程度高等优点,能够方便各个学科针对各学科领域在同一系统架构中进行系统开发和改善设计质量[12]。
需求模型是根据对设计对象进行详细的分析,在完成特定的功能时,弄清设计对象的技术要求,将企业的原始需求转化为系统需求,用创建图形化的需求模型来代替基于文字的需求,具体的需求分析包括功能需求、性能需求等。
1.2 概念方案域
1)基于概念模型和功能模型的概念方案设计。
在机电产品设计阶段数字孪生模型的概念方案域中,从需求模型到概念模型,这是一个从抽象到具体的推理和决策过程,逐渐完善、演化和扩展的过程。图2是概念方案域中产品演化过程的一个流程。
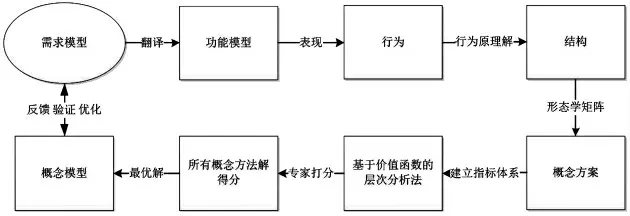
图2 概念方案域演化流程
根据需求模型进行翻译,即表述总任务和总功能,细化成产品所具有的功能。分析相应功能的信号、能力等通过联系建立功能模型。根据功能模型中表现出的行为匹配产生行为原理解,即可寻找出每一基本功能相适应的机械结构。无法找到合适机械结构是说明功能分解过程有误,需要重新进行功能分解,直到找到与之相适应的机械结构。满足功能的机械结构可能有多种,即一种功能可能有多种结构匹配。满足需求模型的概念方案就通过形态学矩阵寻找出多种满足功能模型的解。
2)基于价值函数的层次分析法评价。
概念方案域中提出了一种基于价值函数的层次分析法。该方法是一种多目标决策方法进行改进,在衡量两个因素的重要性时,如分析液压驱动与电动机驱动比例时,这两个因素对驱动的影响程度,设置经济性、性能、后期制造难易程度这3个评价指标进行决策判断。在此基础上再将功能载体分解到目标层、准则层和方案层,再进行权重综合计算得到最佳的目标层方案。即:比较n个因素C1,C2,…,Cn对上一层O的影响程度,确定其在O的比重。对任意两个因数Ci和Cj,用aij表示Ci和Cj对O的影响程度之比。

设第k层上nk个元素对上一层(第k-1层)上第j个元素的权重向量为

1.3 结构设计域
概念方案域中得到概念模型进行机械结构简图绘制,在结构简图基础上进行相关详尽计算和详细设计,对详细结构进行三维建模。结合需求模型,各个部分给出对应的方案,建立了整机结构。通过基于灰色关联度的层次分析法,评价结构设计域结构模型,并进一步完善。
针对其进行工作空间分析及材料分析,建立评价指标体系。在构建的指标层级体系中,指标与指标具有一定的关联性,如尺寸与质量、材料与尺寸等。因此,结构设计域中运用基于灰色关联度的层次分析法。根据德尔菲法,通过专家的专业知识底蕴,斟酌每个指标对上级指标的关联性,然后进行评价,分值越高,则关联性越大。评价方法的步骤如下:
结构设计域的评价指标之间有一定的关联度,计算出指标间的关联度,以此构建对比矩阵;作为层次分析法的输入,再进行层次分析,提出基于关联度的层次分析法。
根据德尔菲法计算关联度,邀请专家针对每个指标对上级指标的关联性进行打分,分值为1~9之间。分值越高,则关联性越大。
确定母序列与归一化:每个指标对应上级指标时,上级指标对自身重要性为9。即母序列设为9,而参考序列为专家给分值。
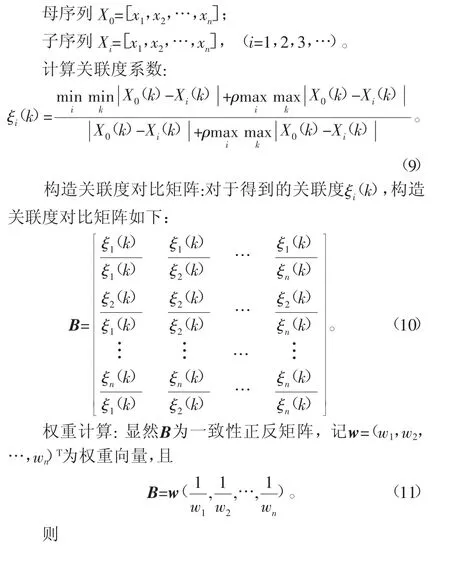

这表明w为矩阵B的特征向量,且n为特征根。对于一般矩阵B有Bw=λmaxw,这里λmax(λmax=n)是B的最大特征根,w为λmax对应的最大特征向量,此时的最大特征向量即为所求权重。利用最大特征根法可以得到相应的权重向量。
组合权重计算过程与式(5)~式(8)一致。
1.4 参数分析域
机电产品参数分析域的评价模型是一个复杂的系统,可以从不同的侧面反映其特性。根据层次关系,分析推导影响特性的因素,得到整个参数分析域的评价指标体系。模型的目标层为参数分析域的评价;准则层包含强度、刚度、寿命、动态特性等指标;二级指标层包含一级准则层各元素的评价指标。
BP神经网络参数域的评价模型分为3个层次,分别是输入层、隐藏层和输出层,每个网络层都包含有多个神经元,每个神经元都与相邻的前一个层的神经元有连接,这些连接其实也是该神经元的输入。图3是BP神经网络参数域评价模型,是3层结构,以专家对参数分析域的各项具体指标意见为输入层,就是到隐藏层进行计算输出到输出层显示结果。

图3 BP神经网络参数域评价模型
反向传播误差是用于训练神经网络的方法之一。它从训练数据的标签中学习,这意味着有一个主管负责指导它的学习。反向传播就是“从错误中学习”,当神经网络出现问题时,主管会进行纠正。学习的主要目的是让隐藏层内各个节点都能获得正确权重值的分配,输入向量给定时,权重能将输出向量合理确定,监督学习时训练集有清晰标签,某些输入给定后,对输出值标签可以有一定预判。
反向传播算法在开始阶段,随机分配输入层的权重。接着对于需要接受训练的输入值,通过正向计算神经网络以后,输出值、期望输出结果可以进行比对,将差值向上个网络层反馈。这个过程会自动记录下来,根据其权重会重新调整。优化迭代,直到输出偏差低于目标阈值。当上述算法完成后,将得出调整过的神经网络,这样就可以应用新的数据分析运算。
参数分析域的评价模型应该包含相关参数的确定及仿真等过程。同时借鉴能力成熟度模型集成技术中的目标分级建立机电产品设计阶段数字孪生模型的评价标准。综合考虑机电产品的强度、刚度、寿命、动态特性等多个方面进行等级划分,将评价等级划分为5个等级,实现参数分析域的一个可持续改进的层次划分,其参数域评价标准如图4 所示。
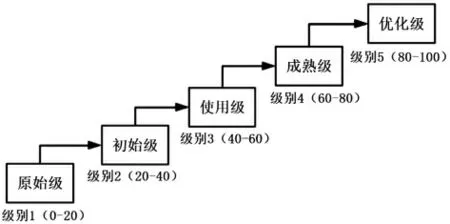
图4 参数分析域的评价标准
级别1是原始级,表示机械臂的参数分析域的指标中有1~2项满足基本要求,不能使用。级别2是初始级,表示机械臂的参数分析域的指标中有2~3项满足基本要求,不能使用。级别3是使用级,表示机械臂的参数分析域的指标中全部满足基本要求,可以使用制造物理样机。级别4是成熟级,表示机械臂的参数域的指标中全部满足基本要求,并有1~2项满足优化要求,已经达到成熟级别,可以使用制造物理样机。级别5是优化级,表示机械臂的参数域的指标中全部满足基本要求,并有3~4项满足优化要求,已经达到优秀级别,可以使用制造物理样机。
2 实例运用
水龙头的剥皮工序是需求夹持器夹住水龙头毛坯件时进行加工,需要设计研发一款对应需求的水龙头剥皮夹持机械臂。因此,该水龙头剥皮夹持机械臂是在应用设计阶段数字孪生模型演化方法下设计工作,由此验证该演化方法模型的合理性和有效性。
2.1 建立需求模型
根据企业要求和实际工作需求,提出如下设计要求:机械臂整机尺寸的长、宽、高分别不超过400、400、500 mm;工作空间(X,Y,Z)在(±300,±300,±700);成本控制在25 万元以内;工作时有效负载为4 kg;机械臂的起动和制动平稳,工作效率高,产生的噪声低,具体如图5所示。
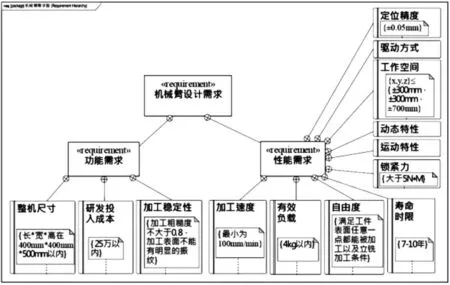
图5 机械臂的需求模型
2.2 概念方法域演化过程
机械臂的总功能是抓取和放下物体,需要抓取装置,同时此功能需要动力源,所以需要驱动装置,动力传递到抓取装置这个过程需要传动装置的配合,为了避免传动速度过快,需要制动装置的配合。图6是机械臂的功能模型简图,主要由驱动、传动、制动和夹持装置组成。
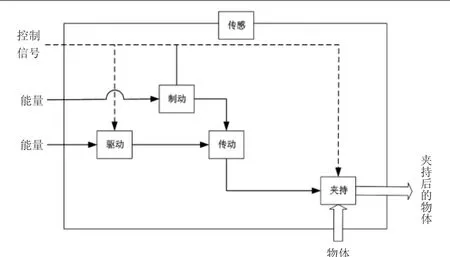
图6 机械臂的功能模型简图
机械臂的功能模型简图通过SYSML建模语言的模块定义图将机械臂各子装置组成关系图形化表达,其组成元素有夹持装置、制动装置、传动装置、驱动装置,SYSML模块定义图通过图层方法展示了各个子装置之间的关系,机械臂模块定义如图7所示。
图7 机械臂模块定义图
机械臂的主要功能是夹持物体。表1所示为机械臂的功能结构及具体设计要求概念方案设计的形态学矩阵。

表1 形态学矩阵
根据专家组的评分意见,结合基于价值函数的层次分析法计算得到概念方案1~方案6,结果如表2所示,最高权重占比的方案4比方案3权重比值约高4.8%,则选择第4种方案,即组合“交流伺服电动机、同步带、谐波减速器、油碟刹、三自由度串联取物组”为机械臂概念方法的概念模型。

表2 方案得分情况
2.3 结构设计域演化过程
根据概念方案域得到的概念模型进行机械结构简图绘制,如图8所示,在结构简图基础上进行具体的结构设计,如图9所示。
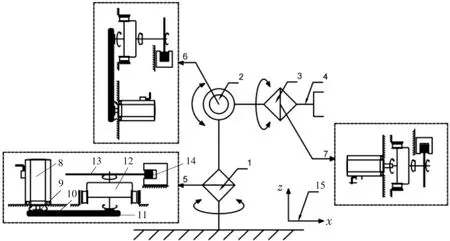
图8 机械臂结构简图

图9 机械臂结构模型
国内外对机电产品结构设计域的评价研究甚少,没有统一系统研究方法,也没有一个统一的指标去衡量机电产品。机械臂的结构设计域的指标体系的构建是一种初步的探索,机械臂的结构指标涉及范围广且难以度量,选取相关指标进行度量;基于材料分析及工作空间分析,将机械臂的结构域指标体系描述成结构相关参数、工作性能、经济性这3个二级指标及相关的三级指标和四级指标,图10为机械臂结构设计域的评价指标体系。

图10 机械臂的结构域评价指标
邀请专家组针对结构设计域的评价指标进行打分,按照基于灰色关联度的层次分析法进行评价,其结果如表3所示,得分为84.92,方案的指标总分较高,基本符合要求。确定机械臂结构设计域的结构模型:空间尺寸方面,一轴长度为365 ~385 mm,二轴长度为110~130 mm;材料为铝6061。说明方案在结构、工作性能及经济性上具有明显的优势。
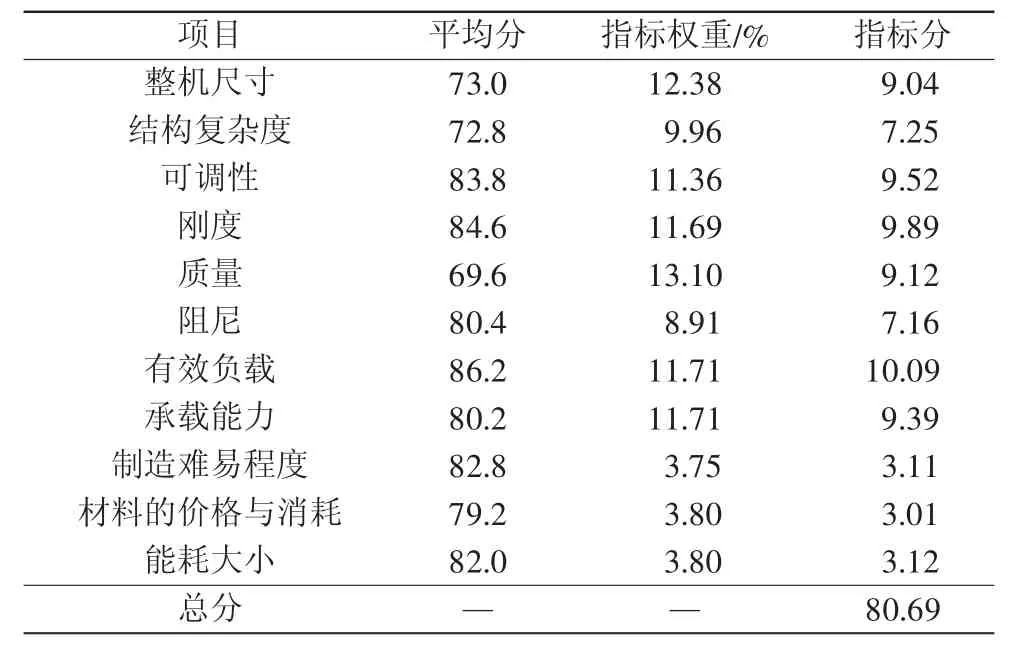
表3 结构设计方案的专家评价表
2.4 参数分析域演化过程
根据结构设计域等的结构模型,在参数分析域对关键零部件和整机结构进行静力学分析、模态分析、运动学分析等,如图11所示。求解出对数字孪生参数域评价有用的参数数据,如总变形、等效应力、等效应变、各阶固有频率和振型,以及速度、位移、加速度等数据;这些仿真数据给基于BP神经网络的数字孪生参数域的评价提供了重要数据依据。
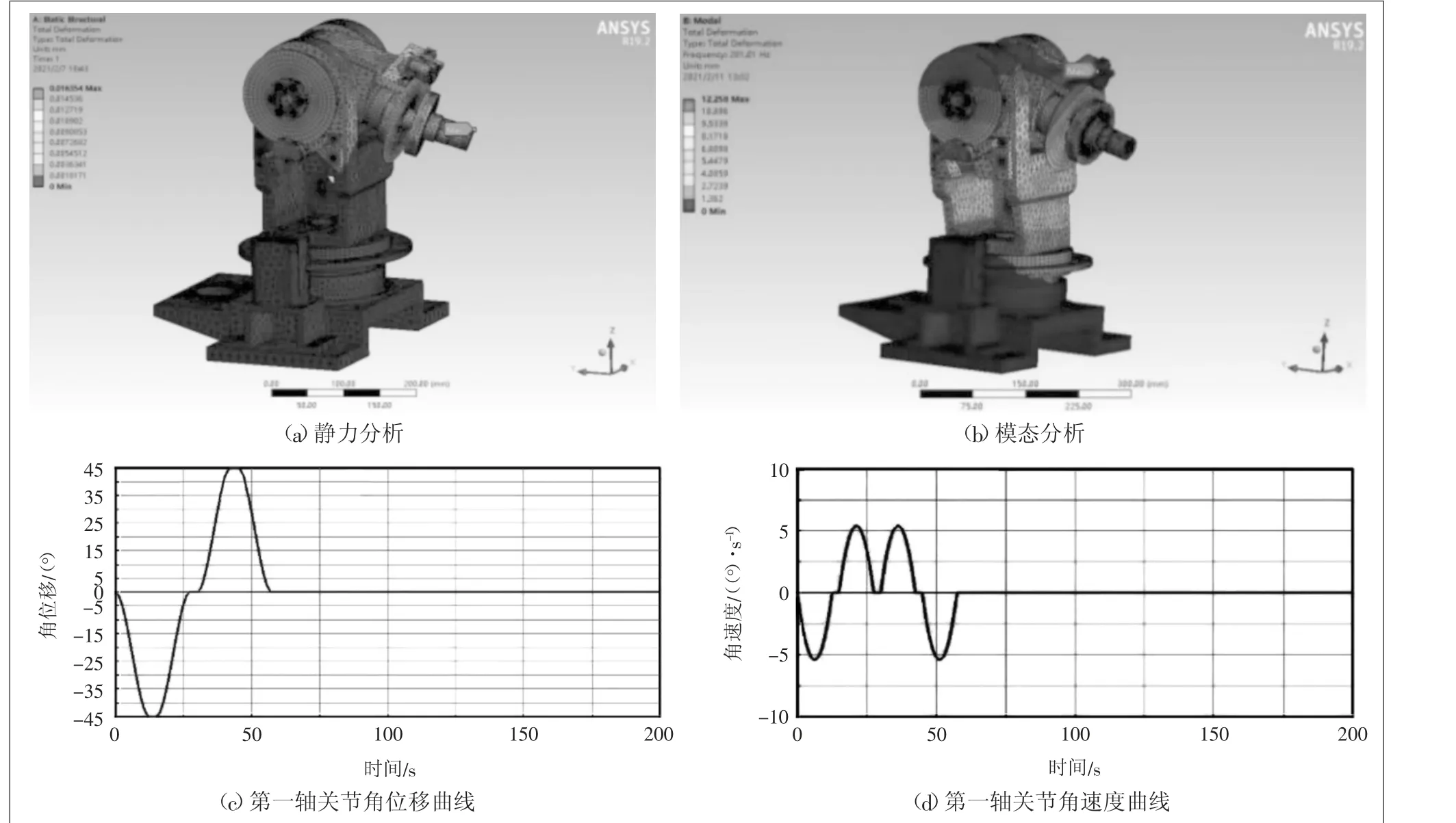
图11 参数分析
参数分析域的评价模型是一个复杂的系统,可以从不同的侧面反映机械臂的特性。根据层次关系,分析推导影响机械臂参数域特性的因素,得到整个机械臂参数域的指标体系。模型的目标层为机械臂参数域的评价;准则层包含强度、刚度、动态特性、可靠性等指标;指标层包含准则层各元素的评价指标机械臂参数域的评价模型体系,如图12所示。
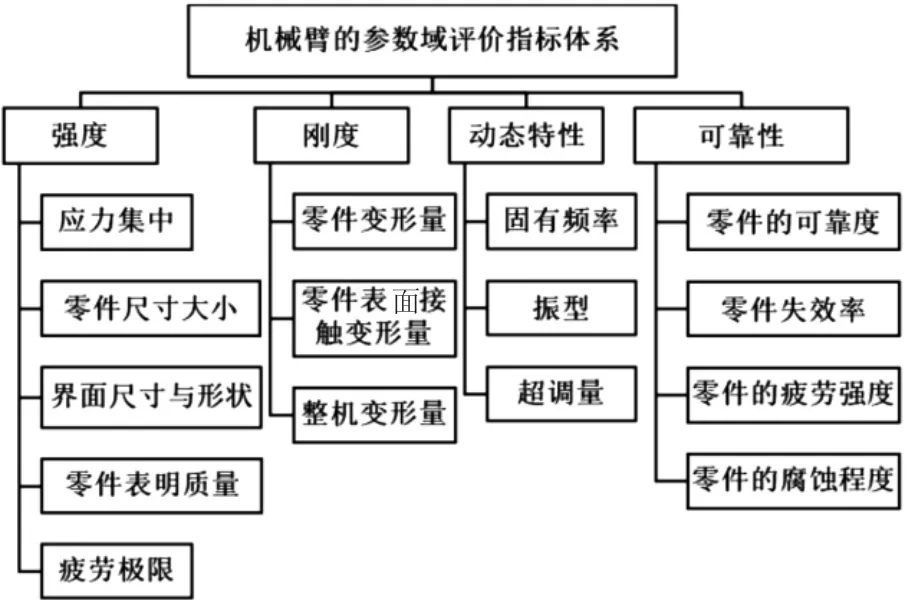
图12 机械臂参数分析域的评价指标体系
对关键零部件和不同工作姿态机械臂整机进行静刚度分析、模态分析及运动学仿真。根据机械臂参数分析域的评价方法,将这些分析结果汇总,邀请专家组以参数分析域的评价指标为条件,对仿真数据结果进行打分,再利用原有训练出的BP神经网络专家库进行权重求和并取平均分,最终评价得分是77.03,该评价结果说明参数模型可行。最终制造机械臂物理样机,如图13所示。
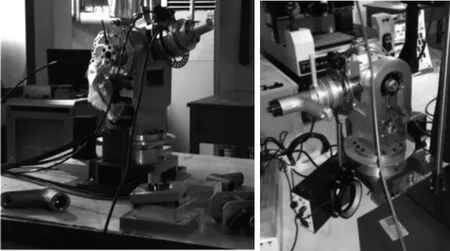
图13 物理样机模型
3 结论
针对机电产品设计阶段提出了一种机电产品设计阶段数字孪生模型演化方法,将数字孪生技术映射在机电产品的设计过程,划分为三域:概念方案域、结构设计域和参数分析域。每个域中都提出了相应的评价方法解决设计过程的合理性,最后制造物理样机,为运行维护阶段数字孪生奠定基础。该方法在设计水龙头剥皮夹持机械臂的过程得到了验证,证明其合理性和有效性。
提出的机电产品设计阶段数字孪生模型演化方法,能有效解决机电产品设计和保证合格。然而,大部分局限于机械部分,对于涉及电气和控制等部分存在不足,因此未来将在这个基础研究相关演化方法,使得机电产品设计阶段数字孪生模型演化方法更加有效和丰富,为产品研发过程中应用数字孪生技术提供了新的理论和技术支撑。
猜你喜欢
房地产导刊(2022年5期)2022-06-01
建材发展导向(2022年6期)2022-04-18
建材发展导向(2021年13期)2021-07-28
建材发展导向(2021年7期)2021-07-16
沈阳工业大学学报(社会科学版)(2020年6期)2020-12-18
中华建设(2019年3期)2019-07-24
建筑建材装饰(2016年11期)2016-12-29
山东工业技术(2016年15期)2016-12-01
装备环境工程(2015年4期)2015-02-28