
Adaptive Attitude Control for a Coaxial Tilt-Rotor UAV via Immersion and Invariance Methodology
2022-09-08 01:46LonglongChenZongyangLvXiangyuShenYuhuWuandXiMingSunSenior
Longlong Chen, Zongyang Lv, Xiangyu Shen, Yuhu Wu,,, and Xi-Ming Sun, Senior,
Dear Editor,
This letter is concerned with the attitude control for a novel tiltrotor unmanned aerial vehicle with two pairs of tiltable coaxial rotors and one rear rotor. An immersion and invariance-based adaptive attitude controller for the tilt-rotor unmanned aerial vehicle is proposed. In the proposed control strategy, an adaptive update law is specially designed to compensate for the uncertainties of damping coefficients. The stability of the resulting closed-loop coaxial tiltrotor unmanned aerial vehicle (CTRUAV) system is proved by the Lyapunov methodology and LaSalle’s invariance theory. Finally, to validate the effectiveness of the designed control strategy, simulations and experiments are performed.
Introduction: In recent years, the development of unmanned aerial vehicle (UAV) has aroused great interest in various fields [1]–[3].Compared with fixed-wing UAVs and quadrotor UAVs, tilt-rotor UAVs (TRUAVs) have a special structure. By adjusting the tilt angle of the rotors, the TRUAVs enjoy the vertical take-off and landing(VTOL) and fast cruise capability [4]–[7]. As a special kind of TRUAV, a CRUAV has been researched in [8], as shown in Fig. 1,which is different from classic dual tilt-rotor aircrafts such as V-22 osprey [9] and possesses two pairs of coaxial rotors with tiltable structure in the front and one rotor at the tail. Hence, it processes better safety redundancy and more compact structure [8].

Fig. 1. Schematic of the CTRUAV.
The control design for the CTRUAV is a challenging task. Firstly,the CTRUAV is an inherent nonlinear system, which is driven by two pairs of tiltable coaxial rotors and one rear rotor, and its maneuvering mechanism is complex. Moreover, the CTRUAV is an underactuated system, and there exists a strong coupling relationship between the tiltable-rotor modules and the airframe. Finally, the parameters of the dynamic model, such as the moment of inertia and damping coefficients, are always difficult to be obtained accurately in the flying process.
In order to compensate for parameter uncertainty, as an effective mean, the adaptive control technology has been widely used in different fields [10]–[12]. However, the classical adaptive controller always needs the linear parameterization (LP) condition and will bring about the singularity problem in the controller [13]. To overcome aforementioned problems, an immersion and invariance(I&I)-based adaptive control strategy is firstly researched in [14] and then further developed by other researchers [15], [16]. The I&I adaptive controller can simplify the stability analysis by introducing cross terms in the Lyapunov function [16]. Furthermore, it provides a cross term between the parameter estimates and the plant states,which can improve the convergence performance of parameter estimates.
In this letter, in response to the aforementioned difficulties for the CTRUAV, a new control scheme is proposed. Firstly, the reaction torque and the Coriolis force on the rotors are counteracted by adding constraints to the actuator mechanism of the CTRUAV. Secondly, in order to compensate for the uncertainties of damping coefficients and reduce the impact of the oversized states on parameter adaptive law,an I&I-based adaptive controller is utilized in this work. Controlled by the proposed controller, the asymptotic stability of the closed-loop CTRUAV system can be guaranteed theoretically. Furthermore, the effectiveness of the proposed control scheme is validated by simulations and experimental tests.
Problem formulation: Before designing the control strategy of CTRUAV, the dynamic model of CTRUAV is deduced.
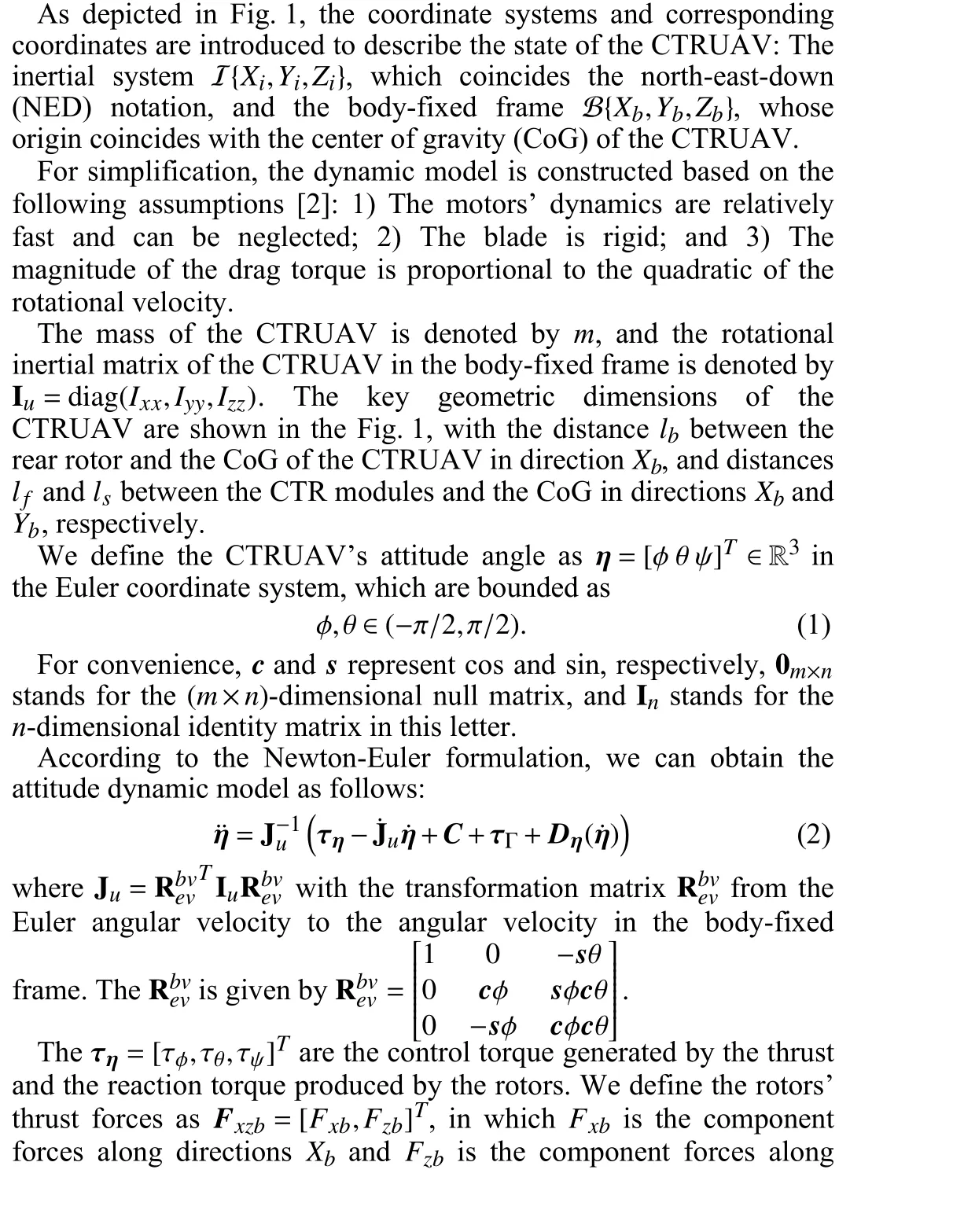

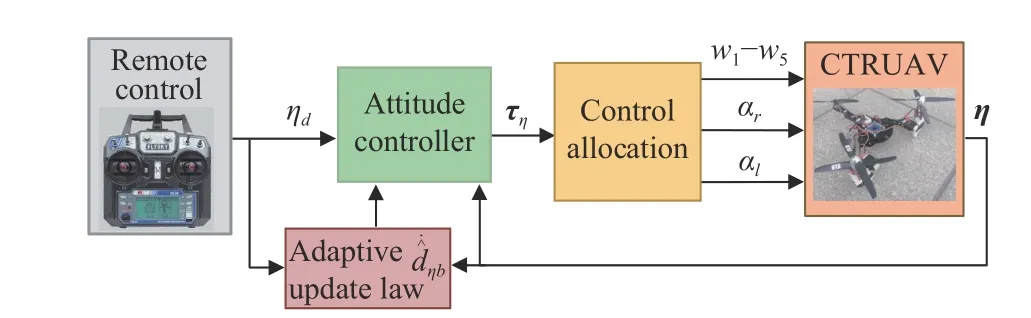
Fig. 2. Schematic of the closed-loop CTRUAV system.

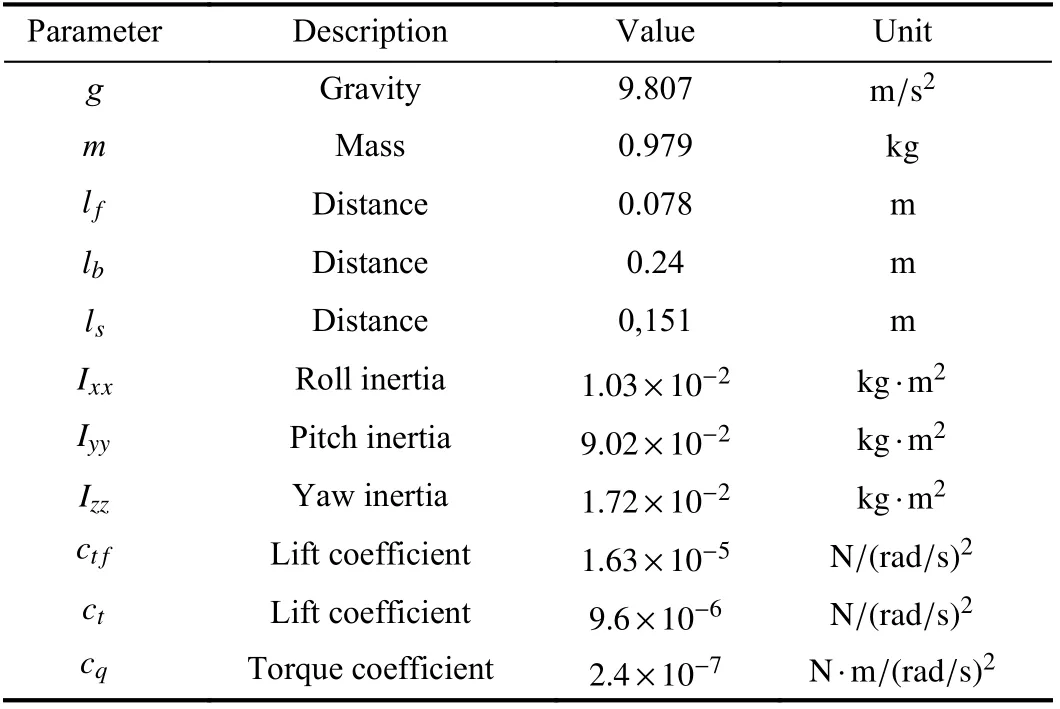
Table 1.Model Parameters
From the simulation results shown in Figs. 3 and 4, and Table 2,we can find that the control performances of the proposed I&I adaptive controller is better than that of the SMC. Furthermore, there is obvious state vibrations produced by the SMC, which will not happen when the CTRUAV is controlled by the proposed I&I-based adaptive controller.
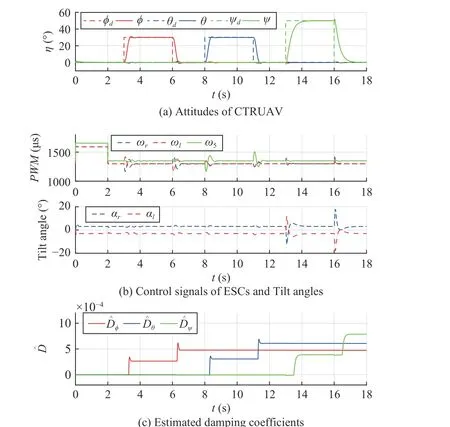
Fig. 3. The results of the simulation tests of I&I.
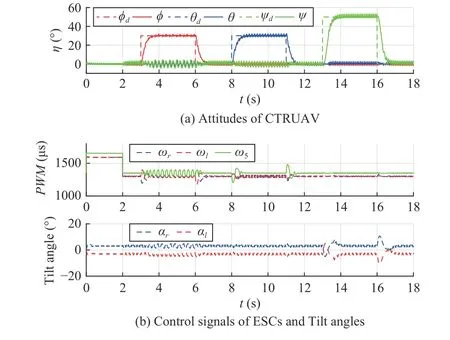
Fig. 4. The results of the simulation tests of SMC.
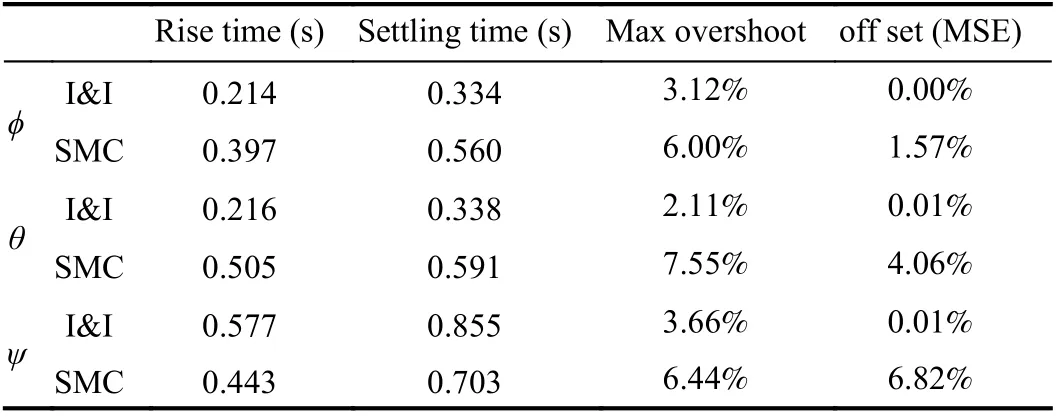
Table 2.Performance Indexes
Experimental tests: To further demonstrate the performance of the proposed adaptive attitude controller based on I&I methodology,experimental ground bench tests are carried out. According to the parameters used in the simulation, the control parameters of the experiments are turned based on that in the simulations and listed as follows: αφ=4, αθ=4, αψ=2.5, ϵφ=80, ϵθ=80 , ϵψ=7,kφ=kθ=kψ=9, ρφ=0.002, ρθ=0.002, ρψ=0.002. Although they are slightly different from that of the simulation, it is still meaningful because it can greatly reduced the time cost in tuning parameters in the experimental tests.
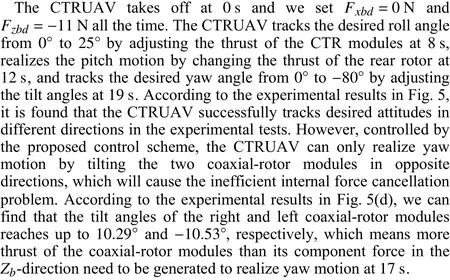
Fig. 5. Experimental results of the ground bench tests.
Conclusion: In this letter, an adaptive controller based on the I&I methodology was proposed to control the attitude of the CTRUAV under the parametric uncertainties. The I&I-based adaptive approach is utilized to formulate a control scheme aiming to compensate for the uncertainty of the damping coefficients. The local asymptotic stability of the closed-loop system is proved by the Lyapunov method. Finally, the effectiveness of the proposed controller is validated by simulations and experiments. However, there still exist some limitations in the proposed controller: It does not consider component faults, and cannot perform velocity control and position trajectory tracking. Future work will focus on robustness and trajectory tracking.
 IEEE/CAA Journal of Automatica Sinica2022年9期
IEEE/CAA Journal of Automatica Sinica2022年9期
- IEEE/CAA Journal of Automatica Sinica的其它文章
- Autonomous Maneuver Decisions via Transfer Learning Pigeon-Inspired Optimization for UCAVs in Dogfight Engagements
- Interval Type-2 Fuzzy Hierarchical Adaptive Cruise Following-Control for Intelligent Vehicles
- Efficient Exploration for Multi-Agent Reinforcement Learning via Transferable Successor Features
- Reinforcement Learning Behavioral Control for Nonlinear Autonomous System
- An Extended Convex Combination Approach for Quadratic L 2 Performance Analysis of Switched Uncertain Linear Systems
- Comparison of Three Data-Driven Networked Predictive Control Methods for a Class of Nonlinear Systems