
基于表面肌电信号的双手平衡状态识别研究*
2022-09-08 05:55:08张夏丰
传感器与微系统 2022年9期
张夏丰, 阚 秀, 曹 乐
(上海工程技术大学 电子电气工程学院,上海 201620)
0 引 言
智能假肢手可以帮助肢体残疾者恢复部分手部功能,同时较大地改善了截肢者的生活质量[1,2]。同时随着科技的进步,智能假肢手的功能也在不断完善。但人手是一个复杂的结构,如何将智能假肢手完善成像人手这样一个复杂的系统,且满足残疾者的日常使用需要是目前该领域的一个重要的研究方向[3]。
表面肌电(sEMG)信号是一种由于肌肉收缩在皮肤表面产生的微弱电信号,其中包含有丰富的肢体运动信息,且该信号可以方便通过无创的方式采集,是智能假肢手控制的理想信号源。文献[4]通过采集单臂肌电信号将表面肌电信号的定量分析方法应用于手臂运动的估计;文献[5]通过将肌电信号与近红外信号结合的方式对单手运动进行识别;文献[6]采用前臂表面肌电信号实现针对伸食指、握拳、伸腕、曲腕四种手势的识别;文献[7]通过单通道表面肌电信号实现了对手部关节信号的识别。当前针对肌电控制假肢手的研究中大多集中于单手肌电信号的研究,对双手协同过程中肌电信号关系研究较少。
本文针对智能假手控制领域对双臂协同方面的需求,以5种双手平衡状态为研究对象,采用自主设计肌电采集系统,选择性放置采集电极以获取双臂表面肌电信号,并对所采集信号进行数据预处理,分别提取肌电信号中的时域特征与频域特征并进行特征分析,最后分别采用3种识别模型对5种双手平衡状态进行识别,获得了较好的识别效果。
1 系统设计
本文采用自主设计采集系统,系统包括8通道肌电采集装置及姿态采集装置,肌电采集装置主要由模拟前端、主控模块以及信号传输块组成。其中模拟前端电路由TI公司推出的用于生物电信号采集的医疗级集成模拟前端芯片ADS1298及其外围电路组成,该芯片内置可编程增益放大器(PGA),及8个24位高分辨率模数转换器(ADC),最大采样率可达到32 ksps[8],为满足肌电信号采集需求,本文采样率设置为1 kHz。主控模块及无线传输模块分别由STM32F103及ESP8266组成。系统中姿态采集装置主要由HI219模块及蓝牙组成,其中HI219模块为超核电子推出的一种低成本、高性能9轴IMU模块,该模块内部集成低功耗微处理器,可直接输出3维方位数据。图1所示为采集系统,其中8通道肌电采集模块分别采集双手肌电信号,姿态采集模块置于实验装置内部,用于采集实验装置的平衡状态。
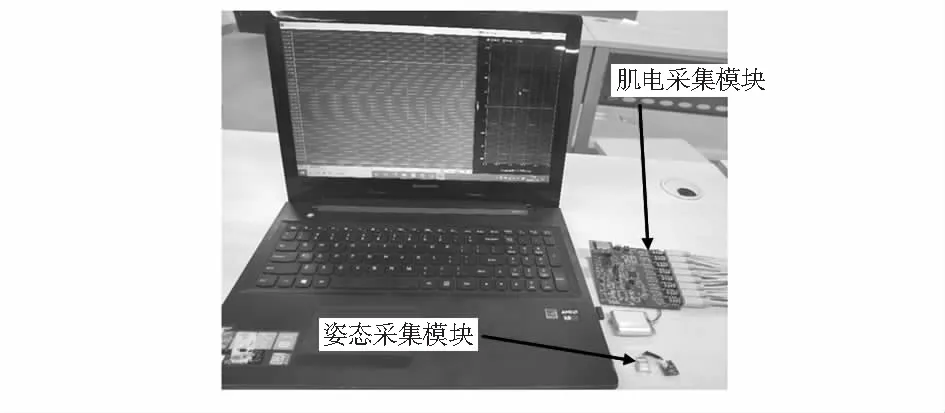
图1 采集系统硬件
2 实验设计与数据处理
2.1 实验设计
实验选取6名受试者,均为男性,年龄在22~25周岁,无神经系统疾病或其他肌肉相关疾病史。在实验开始前,受试者保持肌肉放松,使用酒精清洁肌电采集点。实验分别选取双臂桡侧腕长伸肌、桡侧腕屈肌、尺侧腕伸肌以及肱二头肌作为采集肌肉组,实验开始前将Ag/AgCl电极贴于上述肌肉组。开始实验时受试者分别以平衡、前倾、后仰、左倾、右倾5种平衡状态托举实验箱体,在每次托举结束后手臂恢复放松状态。为避免肌肉疲劳对实验产生影响,受试者每进行一轮实验后休息3 min以放松肌肉。图2所示为受试者分别执行5种平衡状态。
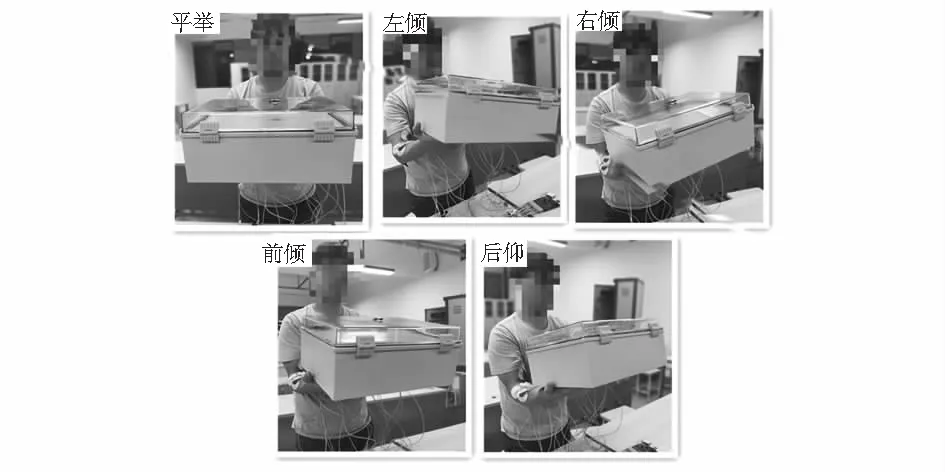
图2 平衡状态
2.2 数据预处理
采集装置设计时,前端电路已设计有RC滤波电路,用于滤除高频信号。由于环境噪声等影响,在采集过程中仍会有一定的噪声信号[9]。若直接对带噪信号进行分析对结果会产生一定的影响,在进行数据分析前,需消除信号中噪声以提高信噪比。
原始信号中,由人体的运动等情况容易致使原始信号产生基线漂移,影响信号质量。基线漂移一般为低频信号,本文采用零相移滤波器提取出3 Hz以下低频信号,将原始肌电信号减去所提取的低频信号。如图3所示为去除基线漂移前后肌电波形图,经处理后基线漂移情况得以改善,且同时消除了信号中存在的原始电位,使静息电位恢复为0 mV。
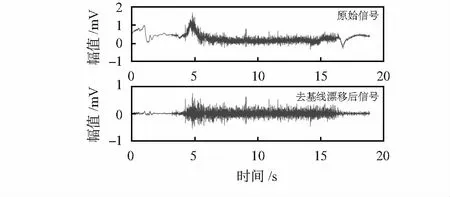
图3 去基线漂移
去除基线漂移后,本文通过采用小波阈值降噪的方法去除仍存在噪声[10~12]。在小波降噪中小波基的选择对降噪效果有较大影响,针对本文所采集的信号特点,选用了sym8小波基作为母小波,并根据降噪效果将分解层数确定为4层。图4为小波降噪前后信号对比,其中,小波去噪阈值分别选用Heursure阈值与Rigrsure阈值做对比,信号经过小波降噪之后信号中噪声进一步降低,通过对结果观察其中Heursure阈值降噪效果优于Rigrsure阈值。本文选用降噪效果较好的Heursure阈值降噪后的数据作为预处理结果进行后续分析。

图4 小波降噪
2.3 活动段划分
准确判断肌电信号起止点是保证分析结果正确性的关键前提[13],本文采用倒谱距离测量法进行肌电活动段划分,根据每个信号帧与噪声帧的倒谱距离的轨迹进行检测和判断[14,15]。若原始肌电信号为xi(m)且其频谱为Xi(ω),则信号xi(m)的倒谱ci(n)可看成是Xi(ω)的傅里叶级数展开,即
(1)
式中ci(n)为倒谱系数,ci(n)=ci(-n)为实数,且存在
(2)

dcep=4.342 9×
(3)
式中p为所取倒谱系数的阶数。

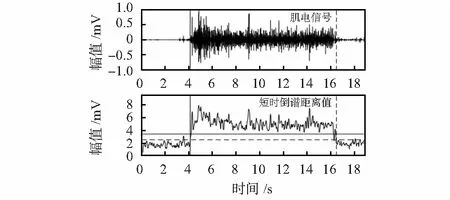
图5 活动段划分
2.4 特征提取
为有效区分不同平衡状态,针对本文所采集肌电信号特点,分别提取肌电信号波形长度(WL)、均方根(RMS)值时域特征与平均功率频率(MPF)、中位频率(MF)频域特征。其中,WL为窗口范围内相邻各个数值绝对差值之和,计算方法如下
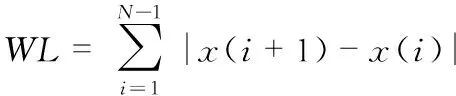
(4)
RMS值为窗口内各个数值的平方和取均值后取其平方根得到,RMS值反映了窗口范围内表面肌电信号的有效值,计算公式如下
(5)
MPF为经过功率谱曲线重心的频率,其计算公式如下
(6)
MF为将功率谱分为两个面积相等区域的频率,在肌电信号频域分析中起重要指标,计算公式如下
(7)
式中P(f)为肌电功率谱。
2.5 特征分析
本文针对每种平衡状态选取100组特征数据并求取其均值,表1~表4分别为8通道肌电数据中WL、RMS、MPF、MF共4个特征在5种平衡状态下的特征均值,4个特征中RMS特征数值较小,为方便观察与分析,将表中数据均扩大100倍。4个特征表中左手1~4通道与右手1~4通道所处肌肉位置相对应。
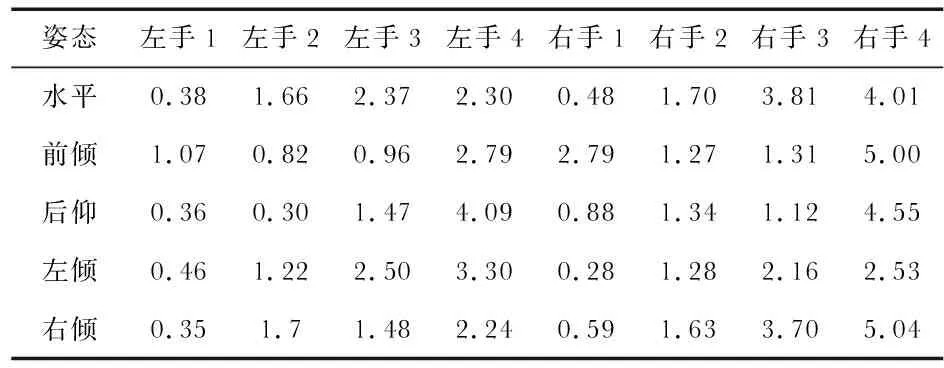
表1 WL特征
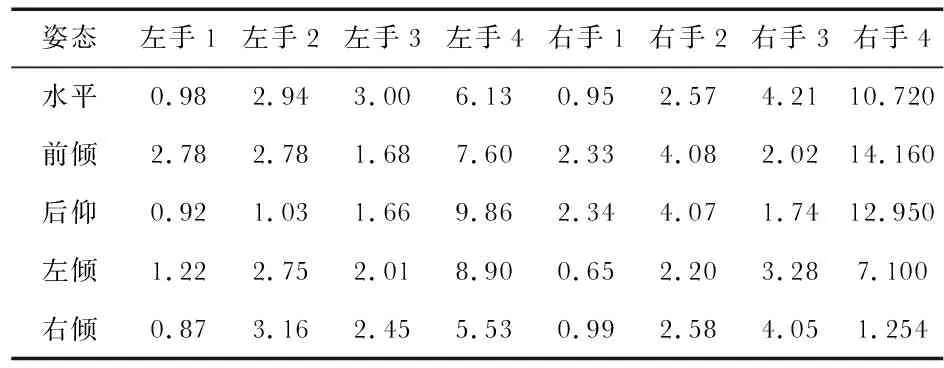
表2 RMS特征

表3 MPF特征
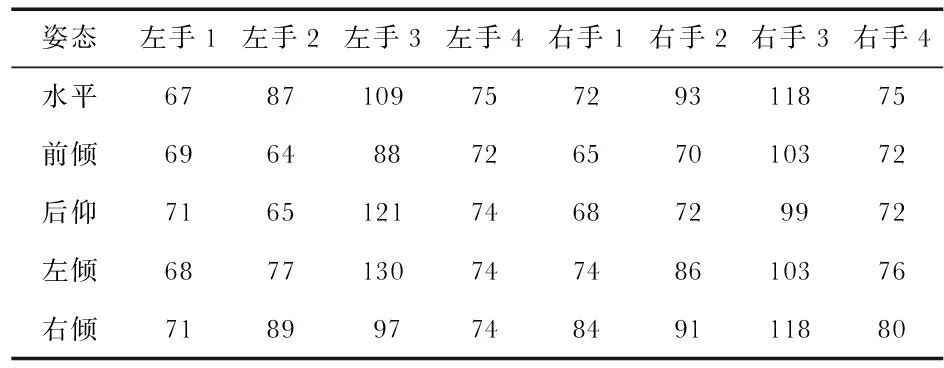
表4 MF特征
通过特征表可得,左倾状态时与右倾状态相比,WL特征除双手通道2中变化趋势相同,其余各通道均呈相反变化趋势;在RMS特征中除通道1中变化趋势相反,双手其余各通道均呈相同变化趋势;频域MPF特征中通道3幅值变化明显,且双手呈相反变化趋势;MF特征中双手通道2与通道3特征幅值变化明显,且通道2中变化趋势相同,通道3中变化趋势相反。前倾状态时与后仰相比WL特征中通道1与通道3呈相同变化趋势,其余两通道特征幅值变化趋势相反;在RMS特征中左手通道1与通道2特征幅值变化明显,但右手对应通道特征幅值基本相同,无明显变化,双手通道4中特征幅值变化趋势相反;频域MPF与MF特征中双手通道3变化趋势相反,且左手特征幅值变化较大。前倾、后仰、左倾、右倾4种状态下各特征幅值与水平状态相比均有不同变化趋势。
3 实验结果分析
本文选取部分样本,采用SVM、KNN、BP神经网络3种流行识别模型对5种平衡状态进行识别,识别结果如图5所示。
图6为SVM算法的识别结果,其中类别标签1~5分别对应水平、前倾、后仰、左倾、右倾5种平衡状态。通过表5可得SVM的平均识别正确率为93.4 %,BP神经网络的平均识别正确率为91 %,KNN的识别正确率为86.5 %,3种识别模型中SVM的平均识别率最高。5种平衡状态中,水平状态下的识别正确率较低,其中SVM在水平状态下识别正确率为83 %,高于其他两种模型。通过对图6观察可得,平衡状态下被错分的样本中除少量被错分为左倾状态外,其余均被错分为右倾状态。SVM对5种平衡状态的识别中,其中左倾状态识别率为94.5 %,低于BP的99 %。其余平衡状态下其识别正确率均高于其他两种模型,其中后仰状态的识别率最高,达到了99.5 %。通过图6中SVM识别结果可得,前倾、后仰、左倾、右倾4种非水平状态被错分的样本中,前倾状态下被错分的样本均被错分成右倾状态,而右倾状态被错分的样本中均被错分成了水平状态。左倾状态被错分的样本中除少量被错分成后仰状态,其余均被错分为右倾状态或平衡状态。后仰状态仅有一个样本被错分为水平状态。
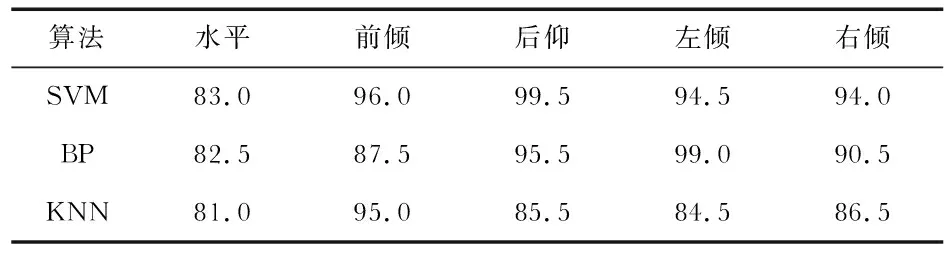
表5 不同算法分类正确率结果 %
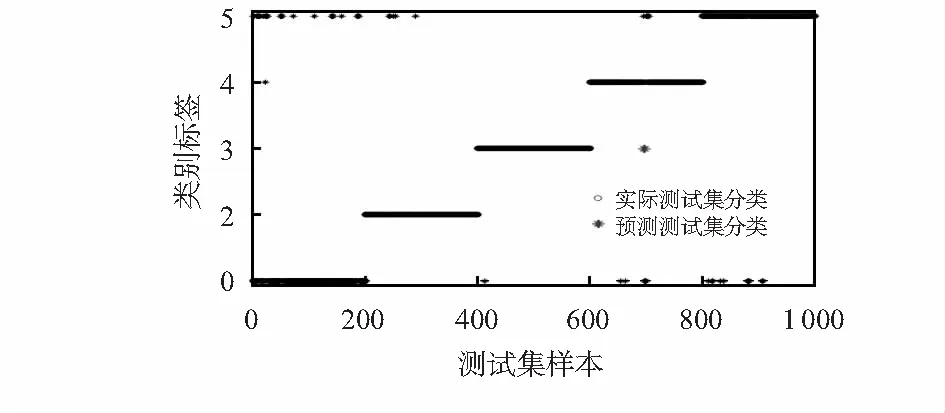
图6 SVM分类结果
4 结 论
本文提出了一种基于表面肌电信号的双手平衡状态识别方法,通过自主设计的肌电信号检测系统对表面肌电信号采集,根据数据特点进行数据预处理并提取有效活动段。在对提取的肌电数据进行时域与频域特征分析的基础上,将所提取特征组成特征矩阵并输入3种识别模型,最高识别精度达到93.4 %,能够满足基本测试需求。实验结果表明:所提出的基于表面肌电信号的双手识别模型对双手平衡状态识别具有较好的效果,为假手的智能控制提供重要的技术支撑。
猜你喜欢
电子竞技(2022年8期)2023-01-30 12:59:56
中国典型病例大全(2022年7期)2022-04-22 06:38:47
银幕内外(2020年8期)2020-01-06 07:55:23
益寿宝典(2018年8期)2018-01-27 01:11:29
NBA特刊(2016年6期)2016-09-16 06:38:44
现代电生理学杂志(2016年4期)2016-07-10 12:02:17
体育科学研究(2015年4期)2015-02-28 17:06:29
黑龙江史志(2014年11期)2014-11-12 22:31:37
河南医学研究(2014年5期)2014-02-27 14:52:47
搏击·武印文踪(2009年6期)2009-04-07 02:02:58
