
数控程序补偿机床反向间隙的精密车削研究
2022-09-08 13:06王洋
内燃机与配件 2022年14期
0 前言
随着现代加工方案的日新月异,为满足高精度零件的加工需求,越来越先进的精密数控加工设备逐渐取代了传统的普工作业,然而圆弧结构在车削时的半径值往往只能依靠具备较高精度的精密数控机床来保证,这便产生了两个问题,一是精密数控机床资金投入太大;另一个便是机床服役较长时间后,丝杠磨损所产生的反向间隙问题。圆弧车削时,机床在接收到“G02”或“G03”的数控指令后需连续控制X轴与Z轴进行梯形插补作业,而较大的丝杠反向间隙便使机床的点位控制度和重复定位精度大幅下降,最终致使在批量加工中,零件产生尺寸漂移和质量离散不稳的情况,严重时还有可能产生扎刀或撞机等安全问题,然而丝杠的维修和更换则又给企业带来了较大的维修成本和时间成本。故无论是使用普通经济型数控机床还是精密数控机床,如何根据丝杠反向间隙值,最大限度保证车削精度便成了最大的问题,本文以某型号船用中速柴油机气阀锁夹槽为例,使用经济型数控机床讨论一种使用数控程序补偿机床反向间隙的精密车削方法。
1 工艺介绍
为保证产品的加工质量,根据设备和材料的不同,需要对气阀进行前道预处理即机加工粗车,具体如下:
1.1 传统经济型数控车床(手工装夹)
1.1.1 夹持φ14mm杆身(此道前已预留加工余量),根据材料选择合适的车削参数即转速、进给、背吃刀量,使用专用定位套(可使用弧形套或切角套),以粗车完成后的颈部圆弧作为定位支撑点,对精车时需要装夹的盘外圆及端面位置进行定量车削,为后道创造精基准。
1.1.2 使用反齿爪顶推盘底面定位,手工锁紧三爪卡盘(如用四爪则装夹后需要打表进行校正杆身,以此来保证夹持基准无误,但由于该道加工前杆身仍然为粗车状态,故校正难度较大,且存在一定偏差),杆端使用内顶尖/凹顶尖定位(如杆端存有中心孔则可直接使用),车削φ14mm杆身,制作打孔基准。
1.1.3 掉头装夹,夹持车削后的φ14mm杆径,以杆端面定位,将中心架移动至变径处,同时将钻头尾座距离归零,在盘底处钻削中心孔。
1.1.4 装夹于外圆磨床,可使用双顶尖进行盘部外圆和盘底面磨削(底面磨削时的磨削长度仅需超越卡爪夹持距离即可),如该步骤使用无心磨床则先磨杆身,再以磨削后的杆身作为基准进行盘底面的中心孔加工。该步骤相对于一般经济型数控的手工装夹并不需要,如若尺寸问题较为严重则可利用磨床创造较为良好的夹持基准。
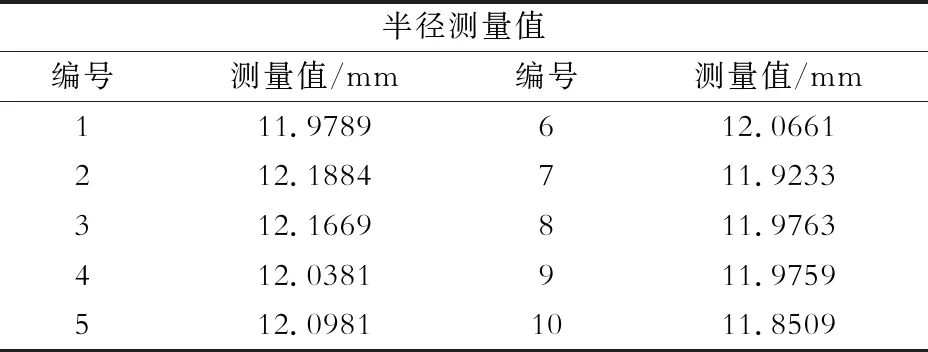
经上表数据可得车床的X轴反向间隙为0.06mm,Z轴反向间隙为0.07mm,对应将测量值输入车床的0034和0035中,此步为正常状态下机床调节反向间隙的通用方法,因加工位置固定则仅需要对所需使用位置进行检测即可。
总之,移动学习必须紧跟信息技术发展方向,促进知识传授的效率和质量。对于师生双方,信息技术环境下的移动学习即是挑战也是机遇,移动学习作为教育发展的阶段性产物,自身仍有许多不足之处,亟待更多的科技工作者和教育同仁共同探索、实践和优化。
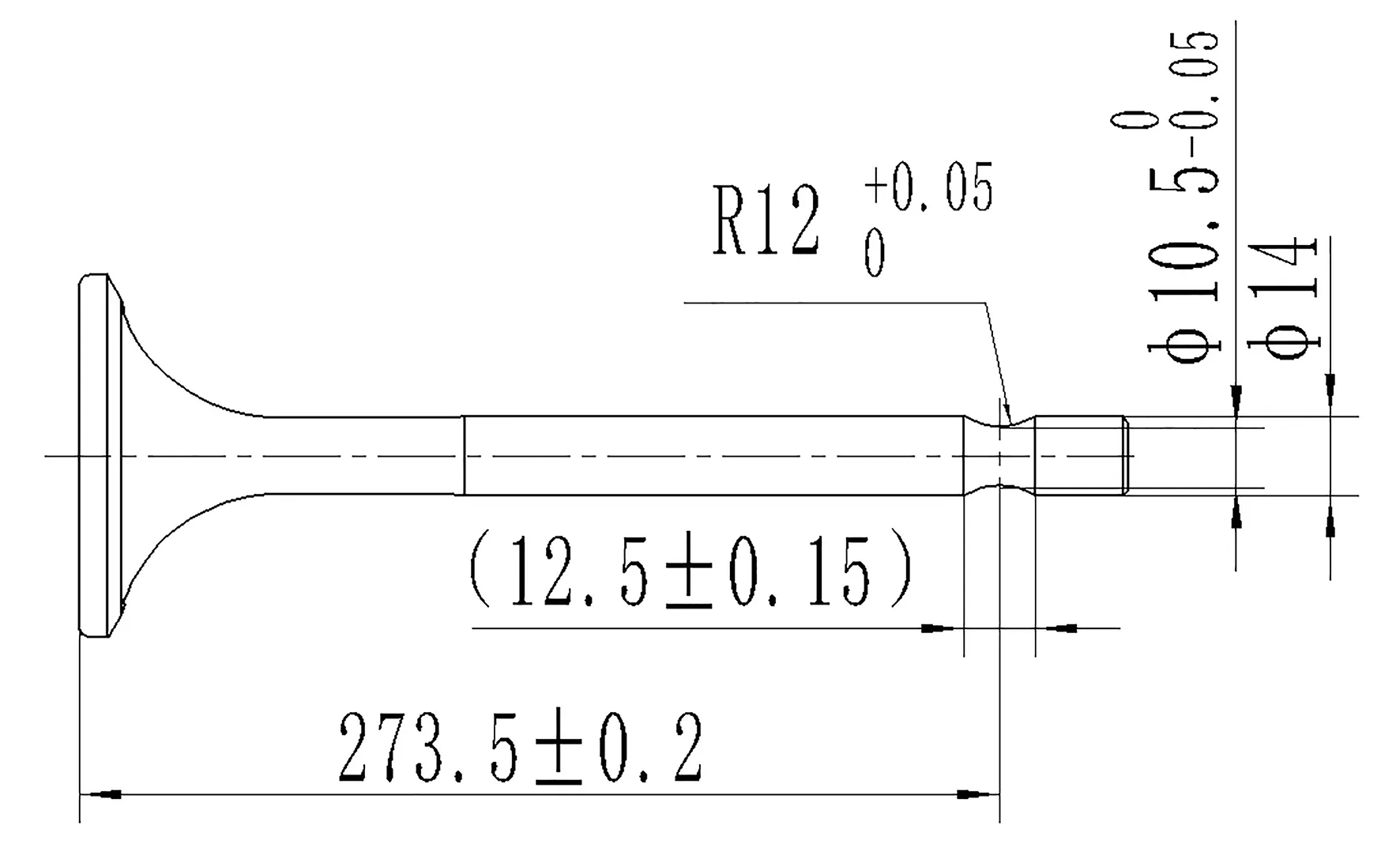
1.1.6 完成1-5步后,则使用“一夹一顶的方式”开始车削图1中R12处锁夹槽。
1.2 使用液压或气动卡爪的数控车床
主要工序路径不变,相比于采用手工装夹的传统经济型数控车床,由于液压或气动卡爪装夹后无法由人工自由调节,则更需要较为优良的基准,故第4-5步则十分重要,值得强调提出的是,现在的精密数控车床及智能车床正在逐步的向无人化,远程化的方向发展,但同时也就意味着其对其他基准创造工序提出了更高的要求,万不可产生某一台设备或某一步工序做的好,就可保证整个产品质量的概念。
1.3 使用伺服、液压尾座、可编程尾座的数控车床
主体加工流程不变,但在执行第6步时,需要测试顶尖的顶推压力的合理性,可打表检测杆身是否存在弯曲情况,如长径比不大的情况下,则需要根据顶尖声音和中心孔的发热情况判断,现在的精密机床大多带有监测压力的反馈机制,以防发生工件弯曲或顶尖碎裂的情况。
1.4 成型数控机床
该种机床情况比较特殊,多为定制机,刀片成型加工,但对被加工工件的回转同心度要求较高,具体如下:
滴滴是最有野心的那个巨头。在滴滴和其背后的腾讯的推动下,ofo和摩拜开始被资本“催婚”。但是,大家都没想到,年轻的戴威竟然如此倔强,还有他手中的一票否决权,最终改变了很多人的命运。
一是坚持竞争立项,把“要我干”变成“我要干”。按照公平、公正、公开的原则,从2010年开始对中央小农水重点县实行竞争立项。2013年,湖北省还对中央财政小农水重点县竞争立项过程实行电视直播,现场评分并公布成绩,有效避免了人为因素和暗箱操作。
1.4.1 执行1-3步;

1.4.3 在杆身磨削/车削完成后可直接进行车刀成型切入,如槽深较大,则需先用外圆车刀进行开粗,最后再使用成型刀进行光整,传统加工方式中,该道光整加工多为滚压,但刀片和滚轮的损耗都比较大,此处介绍该种加工方式仅供参考。
2 实验方案
1.4.2 双顶尖定位磨削杆身,如车床本身直线度及重复定位精度较高则可直接在车床上进行加工,无需再上磨床磨削,值得注意的是由于使用双顶尖车削,车削余量较小,加工效率较低。
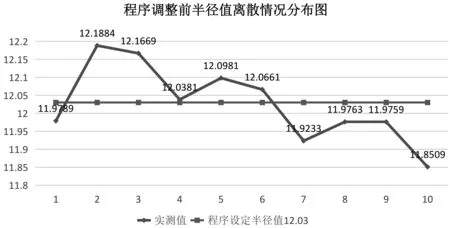
分析:据图表及记录数据分析,尺寸最大离散值为0.1791mm,公差波动范围为-0.1791~+0.1584mm,尺寸公差带为0.3375mm,合格率仅为10%;
3 实验过程及数据记录
3.1 测量机床反向间隙
在同一根气阀上按10mm的相同间隔连续加工10个锁夹槽,完成后按1-10的顺序进行编号,检验阶段,将气阀垂直放置于轴类检测仪平台上,杆端倒角使用凹顶尖/内顶尖进行装夹,定位光学测量圆弧R值,测量值见表2(半径测量值),尺寸离散情况见图5(程序调整前半径值离散情况分布图)。
圆弧段程序为“ G02 U-3.5 W-6.25 R12.03”、“G02 U3.5 W-6.25 R12.03”,刀尖半径补偿为R0.4mm,将程序导入仿真软件中,根据刀路仿真实线图和模型试车图可知,刀路正常,程序无误,未有干涉和失圆情况,见图4(刀路仿真模拟图)。



1.1.5 在普通车床上,采用夹持盘部+辅助中心架的装夹方法,以盘底面定位,手工装夹后锁紧卡爪,中心架移动至尽可能靠近杆端的位置(不影响进刀即可),根据杆端倒角角度,将主切削刃拨转至与倒角角度相同,定位修正倒角,若加工材料较硬或表层含有耐磨涂层,则可使用走刀车削的方式修正。值得一提的是,该步骤虽为普工作业,但却十分重要,因倒角未做修正工序前为粗车状态时加工,在经过磨削后,常常容易出现偏心和半边大小的情况(此在无心磨床加工时更为明显),此道为重要的创造基准工序,若倒角偏移,则将会致使车削锁夹槽时发生不规则的尺寸变化,往往还会出现位置度和同心度漂移较大的情况,也易在装配时发生偏轴。
3.2 程序编制及路径模拟
管理员,即学校的宿管科部门。在这里,管理员不再是传统意义上的系统维护员,更要负责系统的操作运行和新生入住信息的大量导入,对宿管人员工作的考勤等工作。管理员不仅仅要负责整个系统的正常运行和日常维护,还要负责人员信息管理、宿舍信息管理、公共信息管理。

3.3 试车圆弧
以卡爪齿底面为Z轴零位,以气阀中心线为X轴零位,打表检测机床X轴与Z轴机床的反向间隙,见图2(Z轴间隙)、图3(X轴间隙),记录检测数据见表1(SK40P反向间隙测量值)。
批刮第一遍腻子时,大面用靠尺找平,阴阳角用方管靠直,等腻子干了后再进行下一道工序;第二遍腻子批刮并表干后,用300#砂纸带水打磨,打磨后需养护6h以上。批刮此腻子除平整基面,防止渗水外,还可以进一步保证涂层不开裂。按石材面效果用美纹纸分格,再进行下一道工序。
3.4 修改程序及刀补
将刀尖半径补偿由R0.4修改为R0.42,程序段指令修改为“G02 U-3.54 W-6.3 R12.03”、“G02 U3.54 W-6.3 R12.03”,0034和0035中的机床间隙补偿值不变。
3.5 圆弧试车
按照修改后的程序导入机床开始加工,完成后按A-J编号,检验阶段,将气阀垂直放置于轴类检测仪平台上,杆端倒角使用凹顶尖/内顶尖进行装夹,定位光学测量圆弧R值,得出修改后的圆弧半径值见表3(平均半径测量值),尺寸离散情况见图6(程序调整后半径值离散情况分布图)。
山西小浪底引黄工程施工I标的1号交通洞进口位于板涧河左岸解裕乡政府附近,洞口高程291 m,末端连接安装间,终点高程217 m。1号交通洞总长1 105.189 m,最大纵坡9.0%,开挖断面为8.52 m×9.16 m(宽×高),衬砌后的净断面尺寸7 m×8 m(宽×高),城门洞型。1号交通洞作为地下泵站及其附属洞室群的主要施工通道,它的施工进度直接影响到地下泵站及其附属洞室的施工进度。


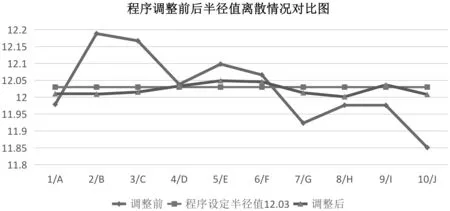
分析:据上图表及记录数据分析,尺寸最大离散值为0.0288mm,公差波动范围为-0.0288~+0.0187mm尺寸公差带为0.0475mm,10支均全部符合图纸尺寸要求。
本文提出了一种新的机器人多传感器数据融合算法,该算法将UIF算法与IMM算法相结合,实现了分布式系统中的多传感器数据融合(UIF-IMM).为了提高动作模式检测和变化的性能以及跟踪精度,在UIF-IMM中提出了一种融合IMM滤波器模型似然函数的方法.对比不同算法下的机器人跟踪结果表明:本文提出的滤波方法可以很好地解决分布式多传感器环境下机器人的跟踪问题.
3.6 对比分析
根据上述实验数据制作质量折线对比图表,见图7(程序调整前后半径值离散情况对比图),从表中可以清晰的看出程序及刀补修改前后的尺寸公差带由0.3375mm缩减至0.0475mm,尺寸波动幅度由-0.1791~+0.1584mm缩减至-0.0288~+0.0187mm,符合产品图纸要求的同时,质量波动减小,加工精度提升,该方案应切实有效。
4 结论
根据上述两组实验对比图7可以看出,机床在执行梯形插补类的指令时,受丝杠反向间隙的影响是较大的,利用程序和刀尖圆弧半径来控制丝杠执行距离的方法应可以达到补偿机床丝杠反向间隙,提升车削精度,从而达到保障回转类零件圆弧形状及尺寸精度的目的。
[1]王海峰. 刀尖圆弧半径补偿在数控车削加工中的方法及注意事项[J]. 技术与市场,2018,25(11):180.
[2]王天旭. 滚珠丝杠副反向间隙调整方法[J]. 设备管理与维修,2011(6):24-26.
[3]刘建国,杨振刚. 蜗轮蜗杆反向间隙消除方法[J]. 设备管理与维修,2021(3):48-49.