
基于信息融合的前方车辆检测技术
2022-09-08 13:06贺沅玮余有粮喻煜烽
内燃机与配件 2022年14期
随着人们的生活水平不断提高,使车辆保有量得到增加,人们也越来越重视交通安全问题。世界各国开始研究车辆辅助加湿系统,使安全行车目的得到实现。通过车辆辅助驾驶系统能够对车辆行驶方向周围车辆、行人等进行实时检测,使驾驶人利用针对性措施避免危险。前方车辆检测能够避免由于安全车距不足导致车辆追尾,提高车辆驾驶中的安全性。所以,本文结合多信息融合实现前方车辆检测,避免单个特征检测缺点,使车辆检测效率与精准率得到提高。
——共建共享,融合发展。整合资源,部门联动,统筹推进,加快乡村旅游与农业、教育、科技、体育、健康、养老、文化创意、文物保护等领域深度融合,培育乡村旅游新产品新业态新模式,推进农村一二三产业融合发展,实现农业增效、农民增收、农村增美。
1 车辆阴影检测
车辆阴影是指光照在车辆中的图像,阴影灰度值接近车辆颜色部分灰度值,对车辆阴影进行检测能够识别车辆问题。阴影主要包括暗影和半影,半影会影响车辆的识别,所以就要消除半影。车辆对比路面背景,浅色车身的灰度值比较大,从大到小灰度值分别为浅色车身、背景、半影、黑色车身和车底暗影。根据上述灰度分布,无论是浅色或者深色的车辆,车辆和半影有一定的差别,所以利用阈值分割图像消除半影,应用公式为:
本题是培养学生转化能力的极佳素材,虽然条件一读就懂、图形一看就明,但一做却又难以入手.不过,借助“知识溯源式目标分析法”却可巧妙地让解题思维转化路线图水落石出.

公式1
公式中的
与
指的是路面灰度均值与均方差,
=20、
=20对车辆阴影检测,通过路面分离。在选择阈值比较低的时候,提取车辆目标存在大面积半影,车辆面积比较大;在选择阈值比较高的时候,和背景灰度接近的浅色车身识别比较困难。
本文使用多门限分割方法使车辆阴影分割准确性得到提高,解决目标与背景具备不同层次的问题。假设经过一次二维最大类间方差分割,求图像
(
,
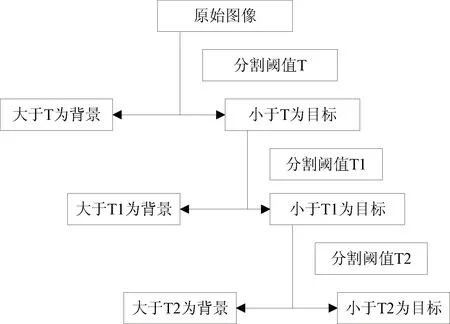
)在灰度级[0,L-1]的全局门限值(s*,T*),原本灰度级为[0,S-1]的区域被划分成为背景C0。为了实现多级分割,使目标与背景区域连续递归的分割。在整个分割过程中,递归实现原图像的灰度级分割,直到没有新区域被分割。为了避免分割门限比较多,使目标区域划分成为不同的区域。本文充分考虑车辆阴影或者底部暗区域灰度值比较低,将路面分割半影消除实现三次分割,分割之后的图像包括五个灰度级,最低灰度级为分割出车辆阴影区域或者车辆底部暗影部分,图1为多门限分割算法流程。
本文使用BDD100K数据集与实验室自建数据集,开发内容多样化,包括不同场景、天气和时间等。本文自建数据集指的是车载行车记录仪在某道路中车辆行驶中得到的,包括不同场景中的实时道路视频和图像。
2 基于融合的车辆检测
2.1 车辆筛选
为了对油泽、积水、桥梁等阴影干扰进行排除,压缩检测对象。使连通区域中上下垂直间隔五个像素距离,对阴影线位置坐标最大值进行选择。根据透视投影原理约束长度。图像阴影长度
与车辆宽度
能够满足比例关系,阴影线长度假设为
,阴影约束条件为:

公式2
对象通过阈值处理作为块状区域,包括车尾和背景。车辆分割后的阴影和车尾能够使矩形特点得到满足,定义矩形度为阴影面积
与外接矩形面积
的比,排除矩形度小于0
6的区域,对阴影区域进行初步筛选:

公式3
车道检测在车辆行为识别中尤为重要,检测结果对车辆行为识别精准性具有直接影响。目前车道检测方法包括Hough变换改进算法、贝塞尔曲线模型检测算法、Haar特性图像匹配算法等,所以选择以上文献方法和本文算法进行评估,选择数据集中的白天、夜晚、傍晚、下雨天四种情景中的600帧图像,表1为车道检测算法评估结果。
完整车辆候选区域利用先验知识表示:在阴影线的左右延伸像素,根据车辆的高宽比阴影线的行动方向确定车辆感兴趣区域。车辆边界结构具有明显的边缘特征,近似为矩形区域。车辆垂直两边界长度大于内部垂直边缘,确定同理水平方向。利用
算法对测量感兴趣区域的边缘检测,计算边缘图像水平和垂直方向的投影积分量。车辆最外边的矩形框指的是利用先验知识得到初步车辆感兴趣区,粗线标记矩阵是指边缘确定边界对车辆候选区进行提取。
美国对伊朗的制裁主要分为“初级制裁”和“次级制裁”。美国对伊制裁始于“初级制裁”且未曾间断,在加入《伊朗核协议》后绝大多数“次级制裁”曾被取消,但目前“次级制裁”已再次启动并得到了强化。“初级制裁”和“次级制裁”区别的关键在于相关行为是否同美国存在连接点(Nexus)。
2.2 信息融合的车辆检测
其一,使非车辆年目标(
)误判成为真车(
);
=2
(
)tan(
2)-
公式4
公式中的
指的是图像中车辆的长度,
指的是图像最大水平宽度,
指的是激光器距离前方车辆的垂直距离。
基于最小风险贝叶斯决策分类器实现先验概率与类条件概率,先验概率
(
)(
=1,2)指的是通过单一视觉图像对车辆目标识别的概率,可以划分为真车
与误判条件下
的概率。通过实验验证,
(
)=87%,
(
)=13%。类条件概率密度
(
|
)(
=1,2)划分成为真车与误判条件下车辆验证函数
值的概率密度分布
(
|
)与
(
|
),
(
|
)指的是正态分布,
(
|
)指的是均匀分布,因为车辆宽度为1.5~2.5m,所以:

公式5

公式6
在对目标车辆验证函数
值计算过程中,得到先验概率
(
)与类条件概率密度
(
|
)之后,使用贝叶斯决策实现初始别车辆目标的分类,可能会存在以下错误判断:
基于视觉传感器检测,使用激光扫描数据库创建车辆验证函数,并且实现最小风险的贝叶斯决策的激光扫描和视觉图像的信息融合。使用车辆验证函数所描述目标车辆特征,实现识别结果的决策和分类,使系统决策精度得到提高。目标车辆高度和宽度通过车辆在图像中的摄像机参数、宽度和激光测量目标距离,利用车辆高度验证结构计算,创建车辆验证函数:
其二,使真车(
)误判成为非车辆目标(
)并剔除。
后者比较危险,但是最终判决要求基于最小错误代价,所以定义
指的是真实情况下
(
=1,2),判决为
(
=1,2)时候的判决代价,设置
11=
22=0,
12=5,
21=1。以贝叶斯公式与判决代价对后验概率
(
|
)与判决风险
(
|
)计算为:

公式7

公式8
假如
(
|
)<
(
|
),说明目标判决为真车风险比较小,所以判决目标为真车;
(
|
)>
(
|
),目标判决为非车辆风险比较小,所以判决目标为非车辆,剔除目标。
3 实验结果和分析
3.1 数据集与实验平台
根据目前我国既有地铁标准站的改造情况来看,大部分改造工程的改造量较小,对既有站运营影响亦较小。通常两线车站采用通道换乘模式,该模式下两线车站结构完全脱离,采用通道或楼梯将两个车站间接连接起来供乘客换乘。现阶段我国地铁车站在未预留换乘条件的情况下,多采用站厅通道连接的换乘形式,在对既有运营线路影响不大的前提下,这是比较现实可行的方案。典型的工程案例如北京的磁器口站和车公庄站,以及广州的员村站等。
3.2 车道检测结果分析
公式中的
指的是安装摄像机高度,
指的是图像中阴影的行。
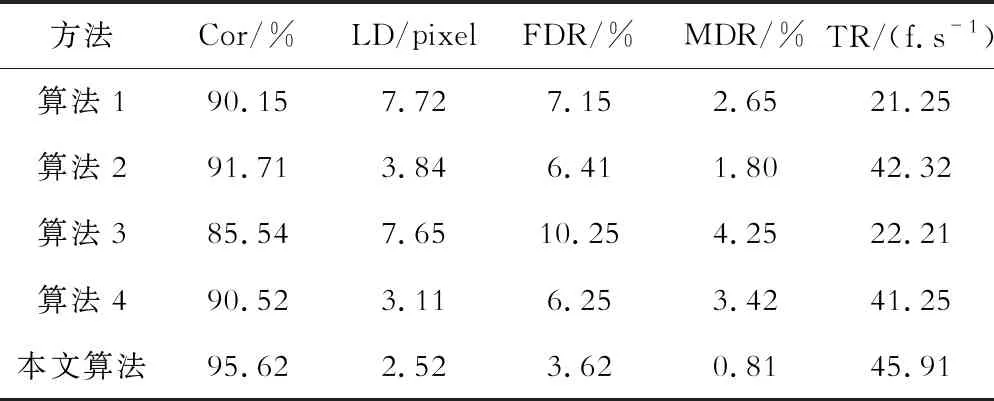
通过表1可以看出来,算法1利用Haar特征对车道信息精准识别,但是算法计算复杂度降低传输速率;算法2使用贝塞尔曲线模型,通过车道连续性特征搜索,使检测实时性与效率得到提高;算法3利用改进Hough变换实现车道检测,和算法2对比的检测精度和效率比较高,降低了算法漏检率与误检率;本文算法在检测车道过程中,利用改进算法创建插值公式,和以上算法对比处理数据量比较少,速度更快,使算法运行效率得到提高,在复杂环境中能够避免车道检测中的精准率。本文算法在白天、雨天、晚上、傍晚环境下的车道检测精准度得到提高,为后续车道行为识别打下基础。
3.3 车道行为识别结果
为了对本文车辆行为识别算法性能进行评估,在公开数据集与实验室创建的数据集中测试。以车道检测结果选择车道检测精准率比较高的算法和本文三次样条车道拟合算法组合,并且使用最小二乘车道拟合算法实现车辆行为识别,和本文算法对比,表2为准确率(Cor)、传输速率(TR)、错误率(Err)的测试结果。

通过表2可以看出来,因为车道检测过程中检测精准率的差异,在车辆行为识别过程中的结果各有不同,本文算法对比其他算法的检测精度不断提高,能够使实时性需求得到满足。在方法4车道拟合方法选择最小二乘法,本文车辆行为识别结果精准率比较高。
研究一的主要目的是初步验证假设H1,即同异步沟通对心流体验的差异影响。本文选择某网络视频网站中的网络用户作为样本,共69名被试参与了实验,其中男性39名,女性30名。
目前,我国跨境电子商务行业人才现状难以满足跨境电商发展的需要。从事跨境电商的人员很多,但真正能让跨境电商企业满意的人才不多。
针对不同场景的车辆行为识别结果,对数据结合选择精准率比较高的方法对车辆行为识别算法进行评估,不同场景选择800帧视频图像,表3为不同场景的车辆识别结果。根据表3中的结果表示,在不同场景下的本文算法都具有较高的识别精准率与传输速率。

4 结束语
本文提出了基于信息融合的前方车辆检测算法,通过实验结果表示,此算法能够对大部分环境下车辆进行检测,具备较强可靠性与鲁棒性,能够实现多阈值分割消除半影影响的方法精准定位车辆。
[1]陈学文, 陈华清, 裴月莹. 基于多特征融合的汽车先进辅助驾驶系统前方车辆检测方法[J]. 计算机应用, 2020, 40(S01):4.
[2]宋士奇, 朴燕, 王健. 基于车道信息融合的车辆行为识别[J]. 液晶与显示, 2020, 35(1):11.
[3]李航, 张琦, 殷守林,等. 一种基于改进Faster RCNN的校园车辆检测方法[J]. 沈阳师范大学学报:自然科学版, 2020, 38(1):8.
[4]胡延平, 刘菲, 魏振亚,等. 毫米波雷达与视觉传感器信息融合的车辆跟踪[J]. 中国机械工程, 2021, 32(18):8.
[5]代晓康, 殷君君, 杨健. 基于Wishart距离和超像素的极化SAR图像车辆检测[J]. 系统工程与电子技术, 2021, 43(10):9.
[6]宋其杰, 刘峰, 干宗良,等. 基于多维特征和语境信息融合的车牌检测方法[J]. 计算机技术与发展, 2021, 31(9):6.
[7]涂超, 赵波, 王喜龙. 基于多源信息融合的交通要素识别方法研究[J]. 农业装备与车辆工程, 2020, 58(2):6.
[8]刘志强, 张光林, 郑曰文,等. 基于检测无迹信息融合算法的多传感融合方法[J]. 汽车工程, 2020, 42(7):6.