减小开关磁阻电机转矩脉动的九区间DITC控制策略
2022-09-02 10:15屈资喻黄朝志陈军刘细平刘威
河南理工大学学报(自然科学版) 2022年4期
屈资喻,黄朝志,陈军,刘细平,刘威
(江西理工大学 电气工程与自动化学院,江西 赣州 341000)
0 引 言
开关磁阻电机(switched reluctance motor,SRM)结构简单,容错能力强,调速性能好,成本低廉,在家用电器、工业生产和航空航天等领域得到了广泛关注与应用[1-4]。但SRM本身固有的双凸极结构和高度非线性的电磁特性导致转矩脉动和噪声问题非常突出[5-7],成为制约其向电动汽车等领域发展的重要因素。对SRM转矩脉动的抑制一般可从电机本体设计和驱动控制策略两个方面进行优化和改进,相较于电机本体设计,驱动控制策略的改进更为灵活方便和显著高效,国内外学者也在SRM控制策略方面做了很多研究。
转矩分配函数(torque sharing function,TSF)控制方式根据反馈的总转矩值,利用转矩分配函数对各相参考转矩进行分配,确保电机各相换相前后的输出总转矩保持恒定[8-11]。由于转速升高导致实际电流无法及时跟踪参考电流或关断相的电流不可控引起转矩脉动增大问题,吴建华等[12]提出一种在线转矩修正策略,该策略在换相初期对前相转矩进行在线正补偿,在换相末期对后相转矩进行在线负补偿,从而实现总转矩平稳,但该方法的实现对硬件采样和补偿计算要求较高。直接转矩控制(direct torque control,DTC)方式也被广泛采用,其将转矩作为控制目标,计算当前电机磁链和转矩值与参考值的偏差,控制功率电路选择合适电压矢量进行输出控制[13-14]。该方法对转矩脉动的抑制显著,但仍存在控制周期不确定、高速运行时性能下降的问题。对转矩的直接控制还有神经网络[15-16]、迭代学习[17]、滑模控制等方法,但其实现相对复杂,在实际工业中应用较少。直接瞬时转矩控制(direct instantaneous torque control,DITC)方式不同于直接转矩控制,无需对磁链进行跟踪,仅通过瞬时转矩与参考转矩的偏差来控制对应相转矩的大小,控制简单灵活,响应速度快[18-19]。由于该方式仅对转矩进行直接控制,对相电流的控制不足,WANG Y L等[20]在DITC基础上引入开通角的自动调节,结果显示对电流尖峰的抑制效果明显。一个电角度周期划分为9个扇区的方法被提出,结合脉宽调制方法以克服电流尖峰,对转矩脉动抑制有较好效果,但对系统的动态性能改善作用有限[21]。WANG S H等[22]利用PWM调制信号取代传统DITC滞环控制器,限定开关频率同时优化开关信号,得到了较好的控制效果。
本文在六区间DITC控制基础上,分析电机转矩、电感对转子位置角、相电流的非线性关系,借鉴国内外学者经验,在划分区间基础上重新设置各区间滞环控制规则,实现相转矩平稳过渡和总转矩基本恒定的要求。同时,在系统转速调节部分,采用较为简单的混合型模糊PID控制,实现对非线性系统动态响应性能的改善。
1 DITC控制策略
与传统SRM控制方式不同,DITC不是通过改变相电流波形间接实现对电机转矩脉动的抑制,而是在合适的滞环规则作用下,将电机瞬时转矩与参考转矩的偏差通过转矩滞环,产生合适的开关管通断信号,实现对功率变换器相开关状态的调整,直接对任一时刻转矩进行控制。DITC系统主要包含功率变换器、转矩滞环模块、瞬时转矩计算模块、转矩分配模块和位置检测模块等,控制框图如图1所示。

图1 DITC控制框图Fig.1 Control block diagram of DITC
1.1 瞬时转矩估计
SRM非线性磁参数和其工作方式特点,导致转矩与电流之间无法建立准确的数学关系,通常可从磁共能入手计算电机一相产生的转矩,即

式中:Tx(ix,θ)为第x相产生的转矩;Wix′(ix,θ)为电机绕组产生的磁共能;ix为第x相电流;θ为转子位置角。
由式(1)可知,磁共能由相电流和转子位置角共同决定,在忽略饱和与互感影响的情况下,可由式(2)对转矩进行估算,

式中:ψx(ix,θ)为电机第x相的磁链;Lx(ix,θ)为电机第x相的电感。当磁路高度饱和时,利用磁共能解析转矩效果并不理想,为提高精确度,利用有限元分析软件得到SRM转矩关于电流和角度的转矩特性曲线,建立T(i,θ)有限元查表法对电机三相转矩进行实时估计。
1.2 功率变换器的3种状态
图2为三相SRM调速系统常采用的不对称半桥式功率变换电路。以A相为例,A相绕组的上下桥臂分别接有开关管Q1U和Q1D,与每个开关管并联的还有续流二极管D1U和D1D,当开关管Q1U和Q1D导通,二极管D1U和D1D截止,电源两端电压加至A相绕组两端。虽然功率变换电路形式多样,但由于SRM转矩与电流方向无关,绕组只需要单方向通电即可,该功率变换电路简单灵活,便于实现较为多样的控制策略,故本文电路选择该结构。

图2 不对称半桥式功率变换电路Fig.2 Asymmetric half bridge converter
每一相开关状态有如图3所示的3种状态。状态“1”:两个开关管均导通,电源电压加载绕组两端,电路处于正向励磁状态,此状态下,绕组中电流迅速建立,若此时正处于转矩产生阶段,电机输出转矩增加。状态“0”:一个开关管关闭,另一个导通,电流通过绕组、开关管和二极管构成回路进行续流,电路处于零电压续流状态,此状态下,绕组中电流缓慢下降,抑制绕组电流的上升趋势,若此时正处于转矩产生阶段,当电感上升率不及电流减小的二次方时,电机输出转矩减小。状态“-1”:两个开关管均关断,电源电压通过续流二极管反向加在绕组两端,电路处于反向退磁状态,此状态下,绕组中电流迅速下降,控制电机输出转矩也迅速减小。
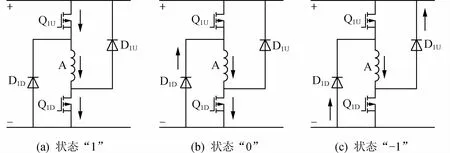
图3 功率变换电路的相开关状态Fig.3 Phase switching states of asymmetric bridge converter
2 六区间DITC滞环控制策略
2.1 六区间的划分
SRM运行期间,按照不同转子角度下导通相数的不同,将产生转矩的区域分为两相交换区(two-phase exchange region,Tp E)和单相导通区(single-phase conduction region,SpC)。如图4所示,区域1为C相和A相的两相交换区,区域2为A相的单向导通区。电机的每一相包含一个两相交换区和一个单相导通区,两个区域随着电机通电相的改变依次交替运行。在三相12/8开关磁阻电机的一个电周期内,三相轮流导通,共有6个导通区,其中3个TpE和3个SpC。
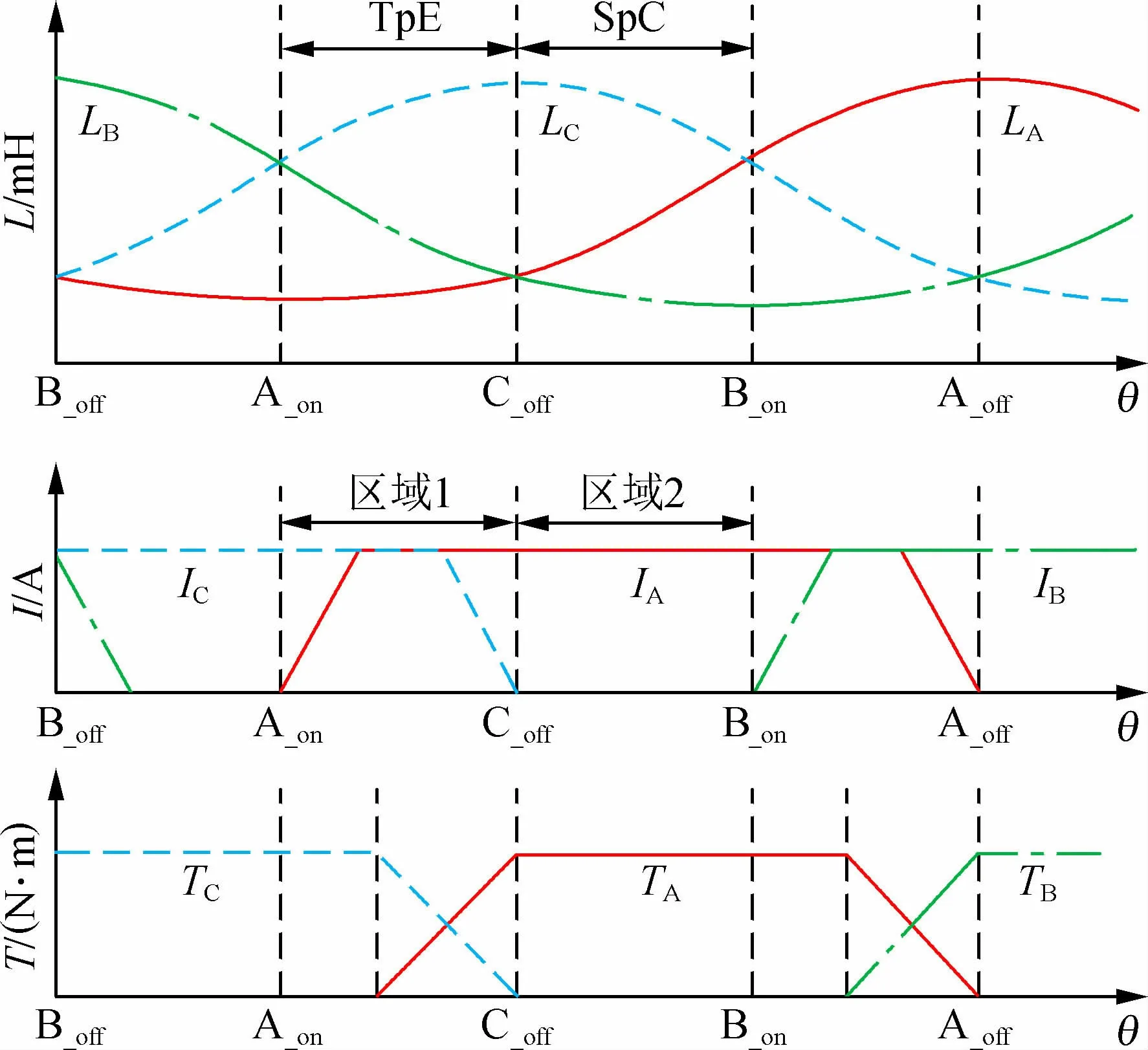
图4 六区间DITC划分示意图Fig.4 Schematic diagram of six regions DITC division
2.2 Tp E控制策略
在滞环策略设计中,为满足电机换相期间总转矩平稳,开关器件损耗降低等要求,一般有以下几点控制要求:
(1)避免两相开关状态在同一转矩偏差下进行切换,以防两相开关管同时动作造成大的转矩脉动和功率损耗。
(2)当需要减小转矩时优先动作退磁相,当需要增大转矩时优先动作励磁相;同时,为加快励磁相电流的建立,控制中避免出现状态“-1”,导致励磁相出现退磁。
(3)滞环状态的切换应围绕状态“0”进行,避免状态“1”和“-1”直接切换。
图5为六区间DITC控制在TpE的滞环示意图,其中C相为退磁相,A相为励磁相。假设开始时C相和A相导通状态均为“1”,A相在此区域为最小电感恒值区,电流开始迅速建立,但产生转矩微弱,总合成转矩仍以C相为主。当转矩偏差ΔT∈(-Tmin,0)时,总转矩相对参考转矩略微偏大,且未超过转矩内环下限,为不减小刚刚导通的A相电流,仅C相动作,控制其由状态“1”进入状态“0”减小瞬时转矩;若总转矩继续增大,ΔT∈(-ΔTmax,-ΔTmin)时,A相也进入状态“0”以减小总转矩。若总转矩仍然较大,超出转矩外环下限,即ΔT∈(-∞,-ΔTmax)时,继续保持励磁相A为状态“0”,C相由状态“0”进入状态“-1”,迅速退磁并减小转矩。总转矩回落阶段,A相维持状态“0”,C相维持状态“-1”。
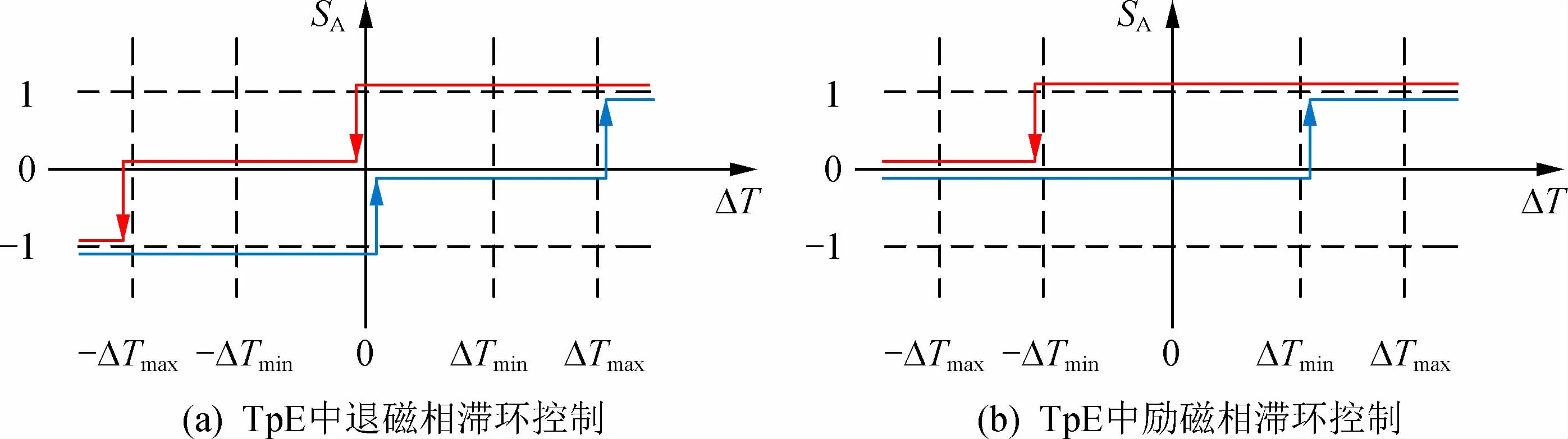
图5 Tp E滞环示意图Fig.5 TpE hysteresis diagram
当转矩偏差ΔT∈(0,Tmin)时,总转矩相对参考转矩略微偏小,但未超过转矩内环上限,C相由状态“-1”进入状态“0”以阻止转矩减小。若总转矩继续减小,当ΔT∈(ΔTmin,ΔTmax)时,A相进入状态“1”以增加转矩。若总转矩仍然较小,超出转矩外环上限,即ΔT∈(ΔTmax,+∞)时,继续保持励磁相A为状态“1”,且C相由状态“0”进入状态“1”,C相被重新激励,补偿总转矩不足。当总转矩回升阶段,A相维持状态“1”,C相维持状态“1”,重新回到开始状态。
2.3 单相导通区(SpC)控制策略
SpC采用两种不同的滞环控制策略,A相为激励相,电机转矩全部由该相提供。图6(a)所示为第一种滞环控制,不存在状态“-1”,只在“0”和“1”之间变化。假设A相的初始状态为“1”,转矩偏差ΔT∈(-ΔTmin,0)时,保持为状态“1”,当实际转矩继续增大,即ΔT∈(-∞,-ΔTmin)时,A相由状态“1”变为状态“0”。维持此状态,则输出转矩下降,ΔT∈(ΔTmin,+∞)时,A相再由状态“0”变为状态“1”。若转矩再次增大,达到转矩内环下限-ΔTmin后,则重复此前控制。

图6 两种DITC在SpC采用不同的控制方法Fig.6 Different control methods of the two DITC adopted in SpC
图6(b)为第二种滞环控制,假设A相的状态为“1”,A相转矩偏差ΔT∈(0,-ΔTmin)时,A相状态为“1”。当ΔT∈(-ΔTmax,-ΔTmin)时,实际转矩较大,A相由状态“1”进入状态“0”来减小A相转矩。若A相转矩仍然过大,即ΔT∈(-∞,-ΔTmax)时,A相状态变为“-1”,相转矩迅速减小。当转矩回落到转矩内环下限后,相开关状态由“-1”进入状态“0”并保持。
当ΔT∈(0,Tmin)时,A相转矩相对参考转矩略微偏小,但未超过转矩内环上限,则保持状态“0”不变。当ΔT∈(ΔTmin,ΔTmax)时,实际转矩较小,A相进入状态“1”,及时增加转矩。当实际转矩回升,再一次达到转矩内环下限-ΔTmin时,进入状态“0”。
2.4 仿真结果及分析
本文以一台750W、三相12/8极开关磁阻电机作为被控对象,在MATLAB/Simulink中建模仿真。仿真模型中,利用AnsysEM 2019软件计算得到电机转矩-电流-角度数据,通过查表法得到SRM任意位置下各相瞬时转矩。相关参数:直流电源电压VDC=314 V;电机绕组阻值Rs=0.6Ω;转矩内滞环幅值均为0.01 N·m;转矩外滞环幅值均为0.02 N·m。转矩脉动系数表达式为

式中,Tmax、Tmin和Tavg分别为合成瞬时转矩的最大值、最小值和平均值。
图7~9分别为CCC控制、DITC1控制和DITC2控制在转速均为400 r/min,负载转矩均为5 N·m时的总转矩波形。从图7~9可以看出,CCC控制下的转矩脉动最大,DITC2控制下的转矩脉动最小,相对于CCC,DITC降低转矩脉动的优势明显。
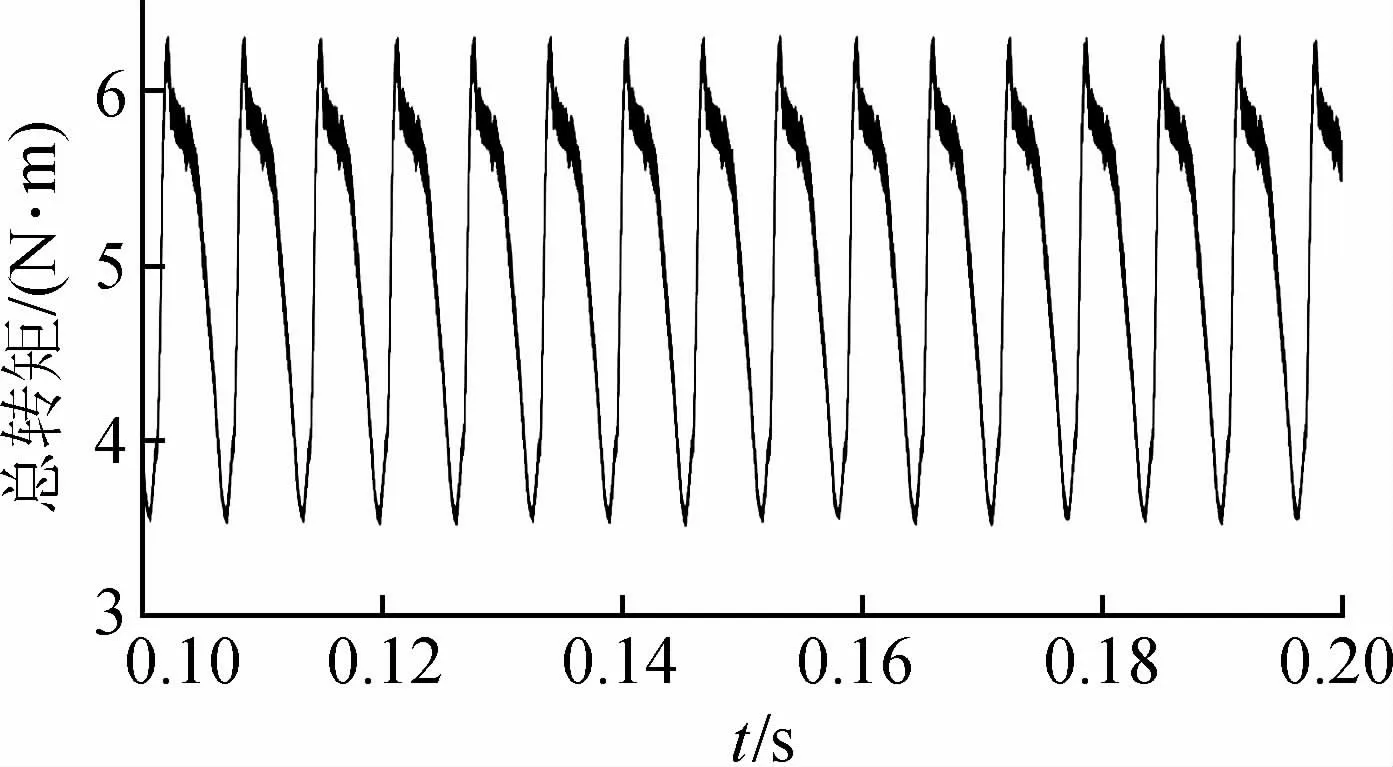
图7 CCC控制下总转矩Fig.7 Total torque under CCC control
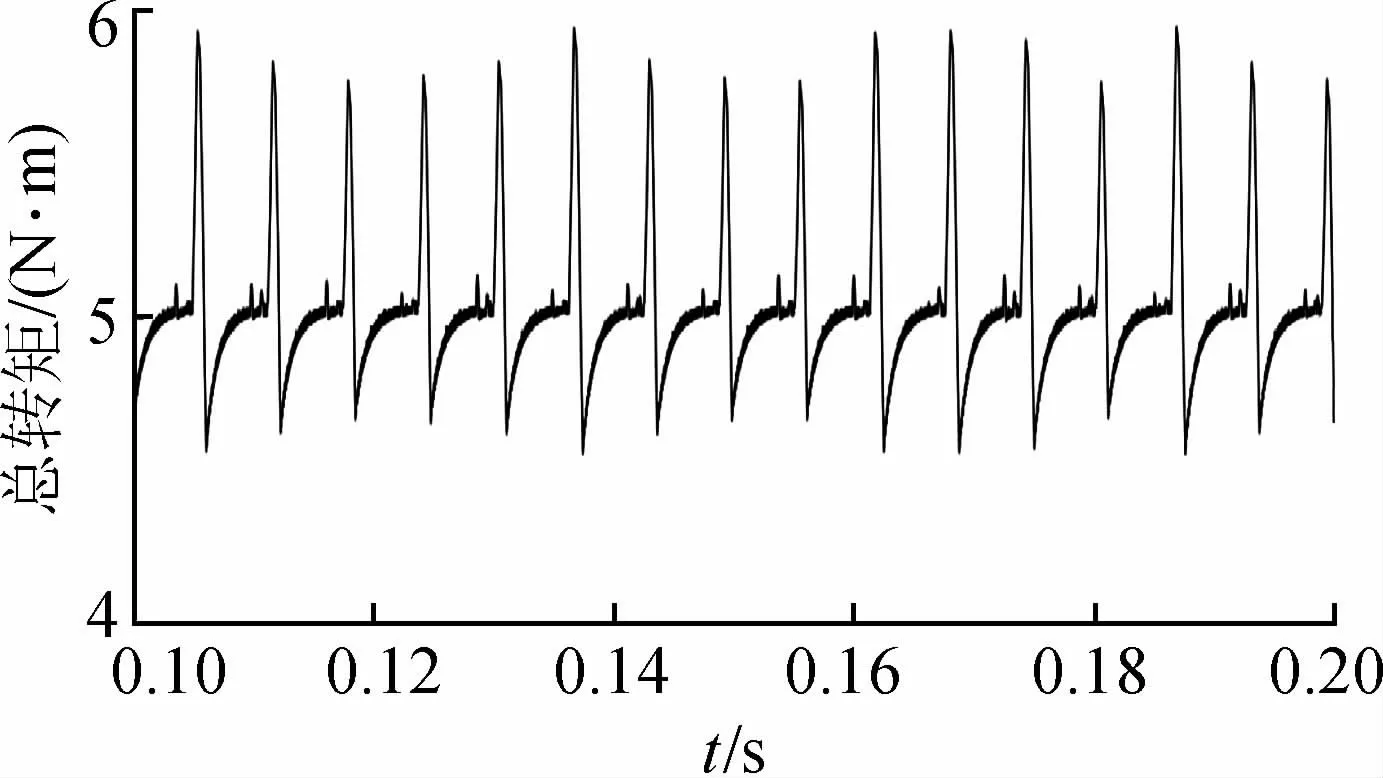
图8 DITC1控制下总转矩Fig.8 Total torque under DITC1 control
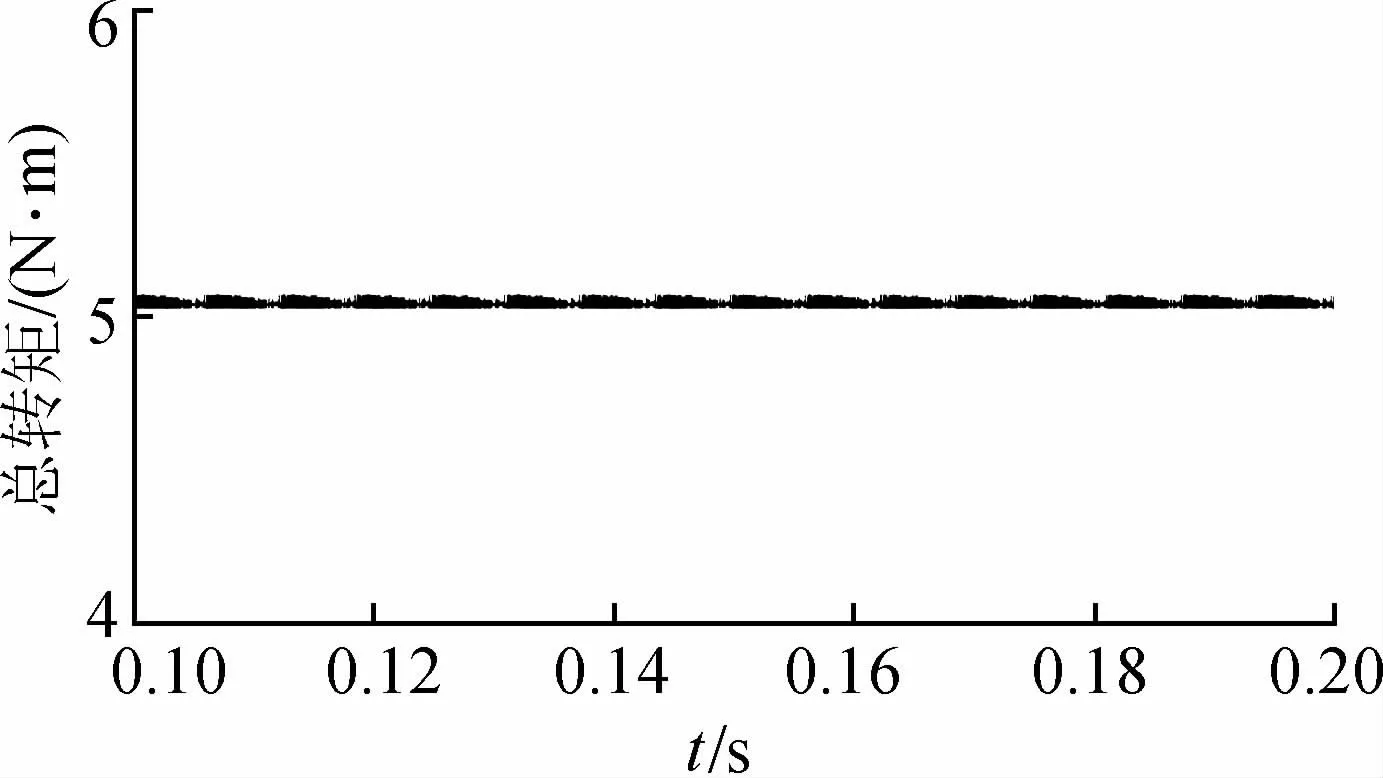
图9 DITC2控制下总转矩Fig.9 Total torque under DITC2 control
DITC1和DITC2在TpE期间控制方式相同,仅SpC滞环规则存在差异。DITC2的转矩脉动明显优于DITC1,其转矩波形更为平稳。利用式(3)对3种控制下SRM的转矩脉动系数进行计算,CCC的转矩脉动系数最大,为52.6%;DITC1的转矩脉动系数为28.2%;DITC2转矩脉动系数为1.05%。
Sp C中,DITC1转矩偏差ΔT被限在(-ΔTmin,ΔTmin),实际转矩过大时,DITC1的滞环控制无法通过状态“-1”迅速减小转矩。在DITC2中,实际转矩超出转矩外环下限时,励磁相迅速进行退磁操作,提高了总转矩的稳定性。
虽然DITC2对转矩脉动有明显的抑制作用,但SRM低速运行时,谐波和功率电路输出的不规则电流脉冲会使换相区存在合成转矩脉冲问题,如图10所示,转矩脉动在换相期间脉动较大。本文将在DITC2控制基础上进行进一步优化。
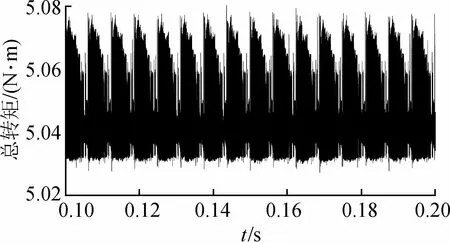
图10 六区间DITC2在5 N·m下转矩Fig.10 Torque diagram of six regions DITC2 at 5 N·m
3 九区间DITC滞环控制策略
3.1 九区间划分
九区间的划分是对两相交换区细化,即在两相交换区,以电感出现明显上升位置为界限,将DITC2中的区域1划分为区域1-1和区域1-2。如图11中A相所示,区域1-1位于A相最小电感恒值区,A相作为励磁相,在此区域因无旋转电动势,相电流能迅速建立,由于d L/dθ≈0,A相转矩可以忽略;同时,区域1-1中C相作为退磁相其电流稳定,且d L/dθ>0,故在换相区域1-1期间电机总转矩仍以C相为主。区域1-2内,A相进入有效工作区域(d L/dθ>0),转矩增加明显,此时电机总转矩为A相和C相转矩之和,容易出现转矩激增现象。区域1-2作为TpE与SpC的过渡区域,对抑制转矩脉动、保持合成转矩平稳十分重要。区域2为A相SpC,此阶段B、C相均关断,总转矩由A相单独提供,因此仅对A相的开关状态进行控制。
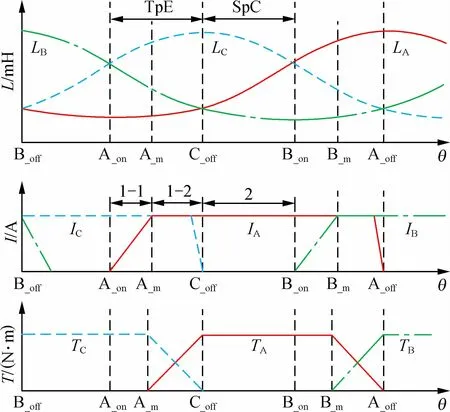
图11 九区间DITC划分示意图Fig.11 Schematic diagram of nine regions DITC Division
3.2 九区间DITC控制策略
在六区间DITC2滞环规则基础上,对区域1-2的滞环规则进行设计构成九区间DITC控制。区域1-2期间的控制原则:总转矩不足时,励磁相A优先提供转矩,以退磁相C提供转矩为辅,尽可能维持A相处于状态“1”。总转矩过大时,优先减小退磁相C转矩,减小A相转矩为辅,尽可能维持C相处于状态“-1”,实现向完全导通A相和关断C相的过渡。图12分别为Tp E中区域1-2中C相和A相的滞环示意图。
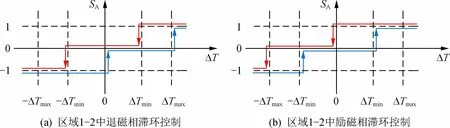
图12 区域1-2中C相和A相的滞环示意图Fig.12 Hysteresis diagram of phase C and phase A in region 1-2
当A相进入电感上升区,相转矩发生较大变化,由于此阶段A相和C相转矩对总转矩影响均明显,且处于Tp E与SpC的过渡区域,应考虑对A相绕组励磁控制和对C相绕组退磁控制。
假设开始时C相为状态“0”,A相为状态“1”,当转矩偏差ΔT∈(-Tmin,0)时,总转矩相对参考转矩略微偏大,A相状态由“1”变为“0”,以减小转矩。若转矩仍然比较大,当ΔT∈(-ΔTmax,-ΔTmin)时,动作C相进入状态“-1”,降低总转矩。当转矩过大,超出转矩外环下限,即ΔT∈(-∞,-ΔTmax)时,控制A相由状态“0”进入状态“-1”,从而减小总转矩。当总转矩开始回落,达到转矩外环下限-ΔTmin时,A相由状态“-1”变为“0”,C相继续维持状态“-1”。
当ΔT∈(0,Tmin)时,总转矩相较参考转矩略微偏小,C相由状态“-1”进入状态“0”可减缓转矩的减小。若总转矩仍然较小,ΔT∈(ΔTmin,ΔTmax)时,A相进入状态“1”,可增加转矩。若总转矩过小,超出转矩外环的上限,即ΔT∈(ΔTmax,+∞)时,保持A相状态“1”,动作C相进入状态“1”,C相重新激励补偿总转矩不足。总转矩回升,回到转矩外环上限ΔTmax时,C相由状态“1”变为“0”,A相维持状态“1”,回到开始状态。
将9个区间不同转矩偏差情况下的相状态汇总于表1。
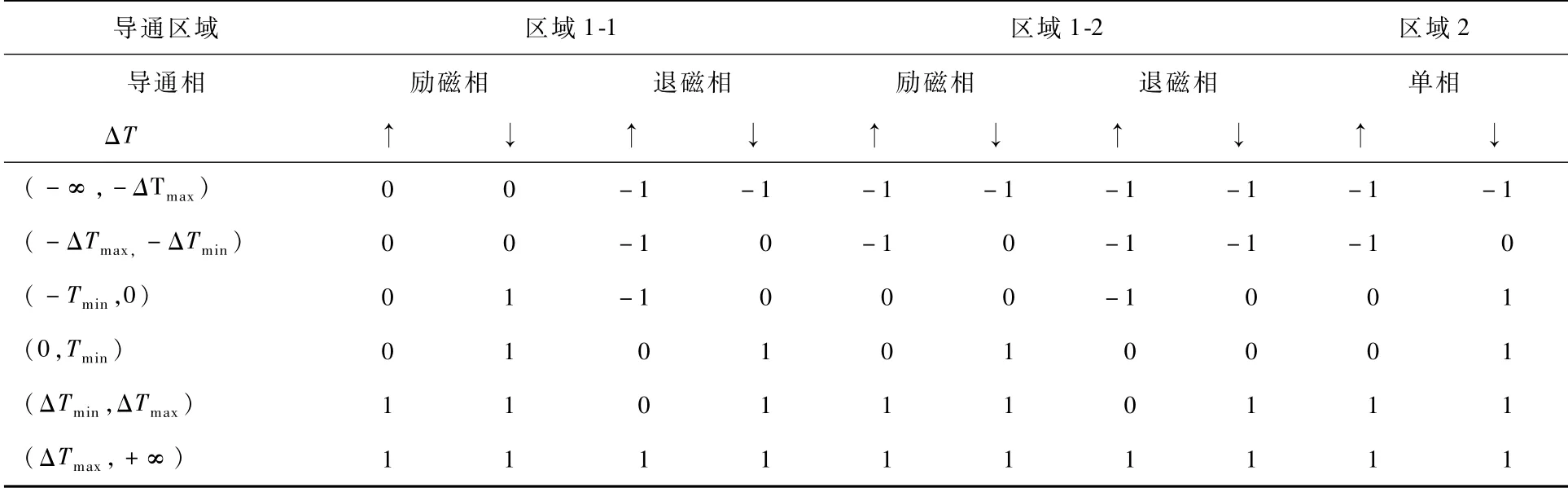
表1 九区间相状态Tab.1 Nine regions phase state rule
3.3 仿真结果及分析
图13为九区间DITC控制在转速为400 r/min,负载转矩为5 N·m情况下的总转矩波形图,与图10相比,转矩脉动向上的趋势得到改善,转矩波形也更为均匀,其转矩脉动系数为0.84%。
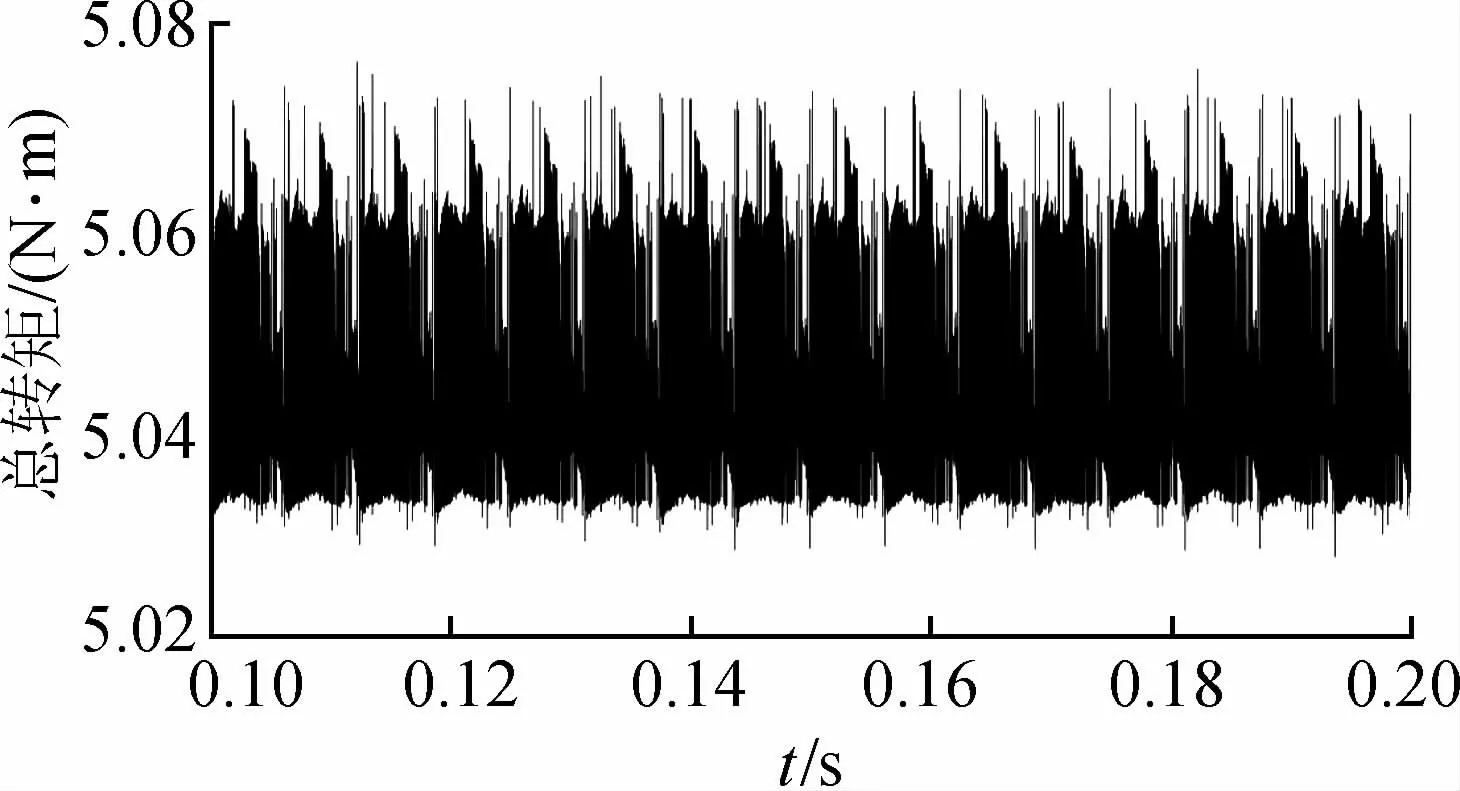
图13 九区间DITC在5 N·m下转矩Fig.13 Torque diagram of nine regions DITC at 5 N·m
图14和图15分别为六区间DITC2和九区间DITC在转速为400 r/min,负载转矩为10 N·m情况下的总转矩波形图。转速不变,负载增大时,九区间DITC的总转矩波形更为集中密集,转矩脉冲更小。两种控制下的转矩脉动系数分别为1.5%和1.1%。
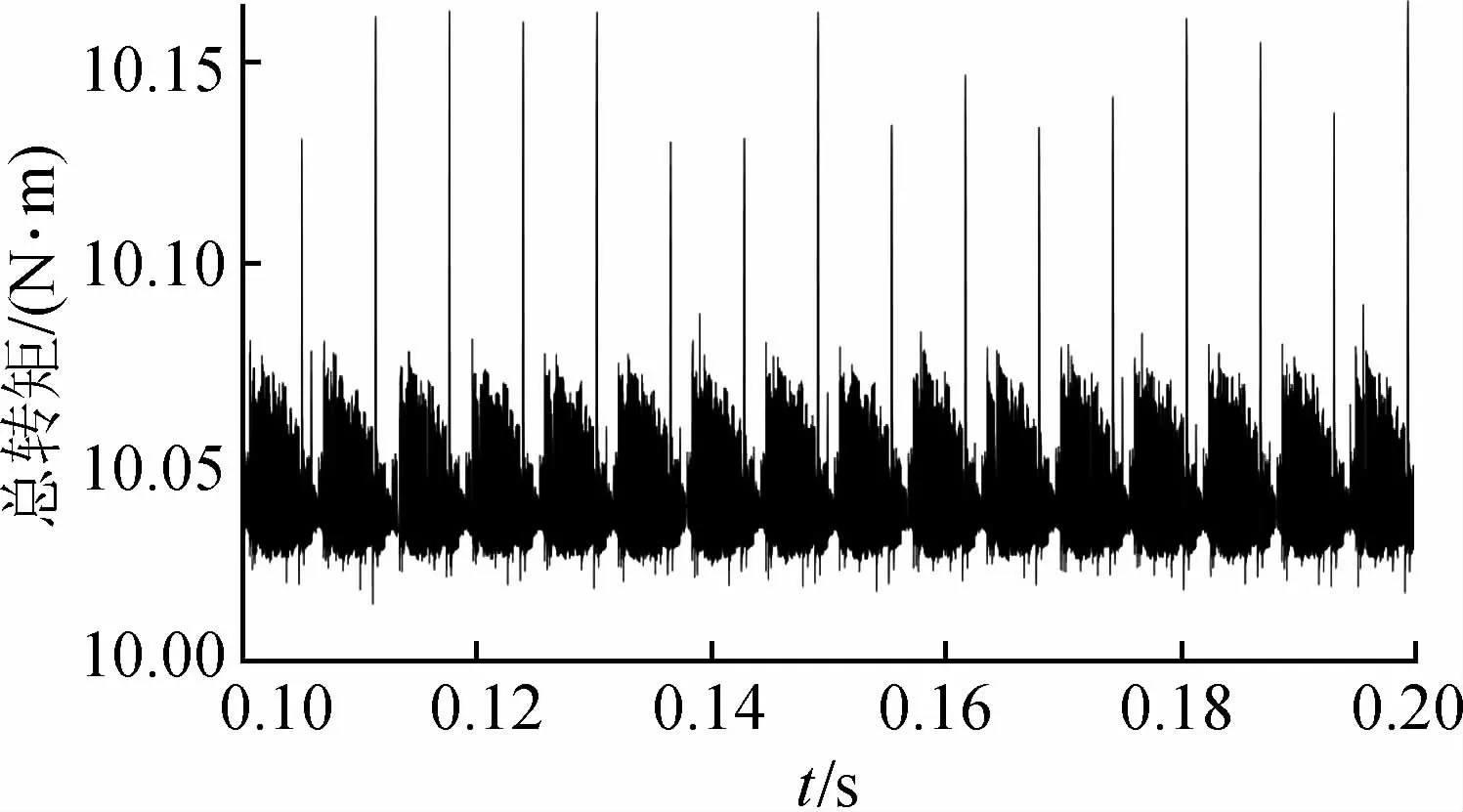
图14 六区间DITC2在10 N·m下转矩Fig.14 Torque diagram of six regions DITC2 at 10 N·m
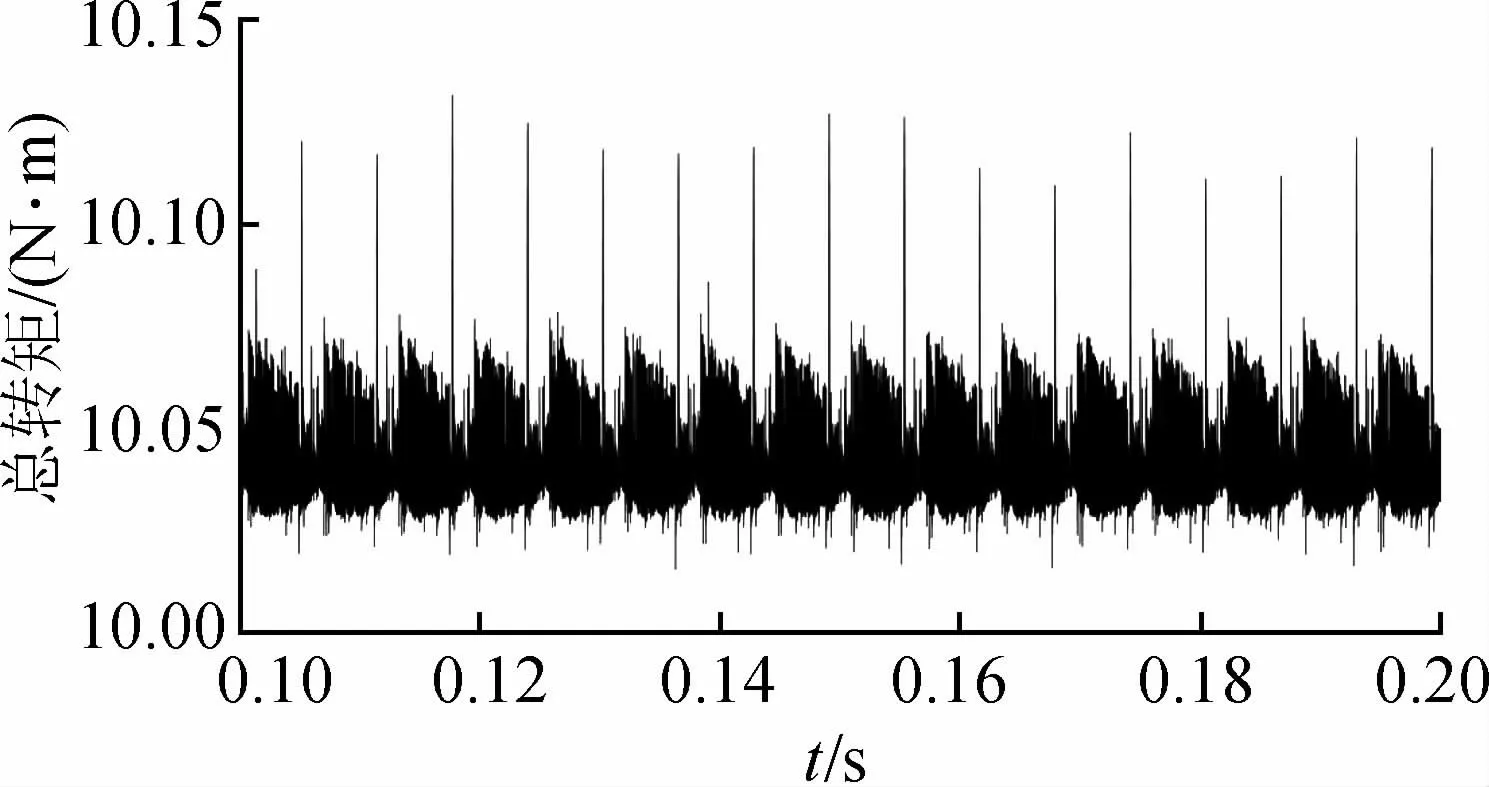
图15 九区间DITC在10 N·m下转矩Fig.15 Torque diagram of nine regions DITC at 10 N·m
4 转速调节器设计
电机机械方程为

式中:Te为电机总电磁转矩;Tx为电机第x相产生的电磁转矩;m为电机相数;TL为负载转矩;J为转动惯量;D为摩擦系数。其中,电机角速度ω与角位移θ的关系为

根据式(4)推导可知,期望转矩可以通过转速调节器获得。当电机转速恒定时,电机角加速度dω/d t=0,电机机械方程可表示为

此时电机的电磁转矩等于摩擦转矩与负载转矩之和。若电机角加速度发生变化,电磁转矩会随着变化,即

当时间Δt足够小时,电磁转矩的瞬时变化量ΔT与电机转速的瞬时变化量Δω成正比,即

由此,通过转速调节器将外环转速偏差转化为内环期望转矩。
4.1 混合型模糊控制器结构
模糊控制不需要被控对象有精确的数学模型,对非线性系统有较强的自适应能力和鲁棒性,用途广泛。在模糊控制中,通常将误差e和误差变化率ec作为输入构成PD控制器,可获得较快的响应速度,但该方法无法消除稳态误差。为克服这一问题,本文将PD控制与PI控制结合,构成模糊PID控制器,以得到较好的控制效果。如图16(a)所示,模糊控制器输入量为转速误差e和转速误差变化率ec,经过模糊化、模糊规则和解模糊后,输出量与积分环节输出量和作为输出期望转矩T*参与到系统转矩内环控制中。二维模糊控制器结构如图16(b)所示。

图16 模糊PID控制器框图Fig.16 Block diagram of fuzzy PID controller
4.2 精确量的模糊化
模糊控制中,e的变化范围为[eL,eH],ec的变化范围为[ecL,ecH],需通过量化因子变换到基本论域{-n,-n+1,-n+2,…,-1,0,1,…,n-2,n-1,n}中,控制量u的变化范围[uL,uH]通过比例因子变换到基本论域中。误差和误差变化率的量化因子Ke和Kec分别为,

实际控制中,误差和误差变化率在[ a,b]内,并非在离散论域{-n,…,n}内,因此通过式(11)进行转换,

系统控制量u比例因子即为

输出控制量在离散论域{-n,…,n}内,通过式(13)转换为实际的连续值,

本文以电机速度作为控制量,其误差范围为-400~400 r/min;误差变化率范围为-100~100 r/min;控制量变化范围为-100~100。离散论域均取{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6}。根据式(9)、(10)和(12)计算得到ke、kec和ku分别为0.006、0.06和0.06。选用7个语言变量值对电机速度误差、速度误差变化和控制量变化的基本论域进行表述,即负大(NB)、负中(NM)、负小(NS)、零(ZE)、正小(PS)、正中(PM)、正大(PB)。隶属度函数均采用三角形分布隶属函数。
4.3 模糊控制规则
模糊控制规则是模糊系统的核心部分,通常由若干个形式为“IF(条件满足)THEN(得出结论)”的规则组成,其中条件和结论作为模糊规则的前件和后件,均为模糊量,通过对前件条件的判断,在控制规则表中采取对应控制措施,实现模糊推理。模糊控制规则如表2所示。

表2 模糊控制规则表Tab.2 Fuzzy control rule table
4.4 模糊量清晰化
由模糊规则得到的模糊控制量无法直接作用于被控对象,需要通过合适的判决方法对模糊输出量去模糊,使其输出一个精确量。本文采用Mamdani判决法,即加权平均法,表达式为

式中:u为精确量输出;ui为模糊量输出;μU(ui)为模糊集合的隶属度。
4.5 仿真结果及分析
图17显示了九区间DITC控制在模糊PID控制器和传统PID控制下的系统阶跃响应情况。对比发现,引入模糊PID控制后系统未发生超调,在0.025 s时达到参考转速值;传统PID控制下转速有明显超调,在达到参考转速之前存在震荡,调节时间为0.037 s,超调量14%。模糊控制对非线性系统的优化效果优于传统PID控制。
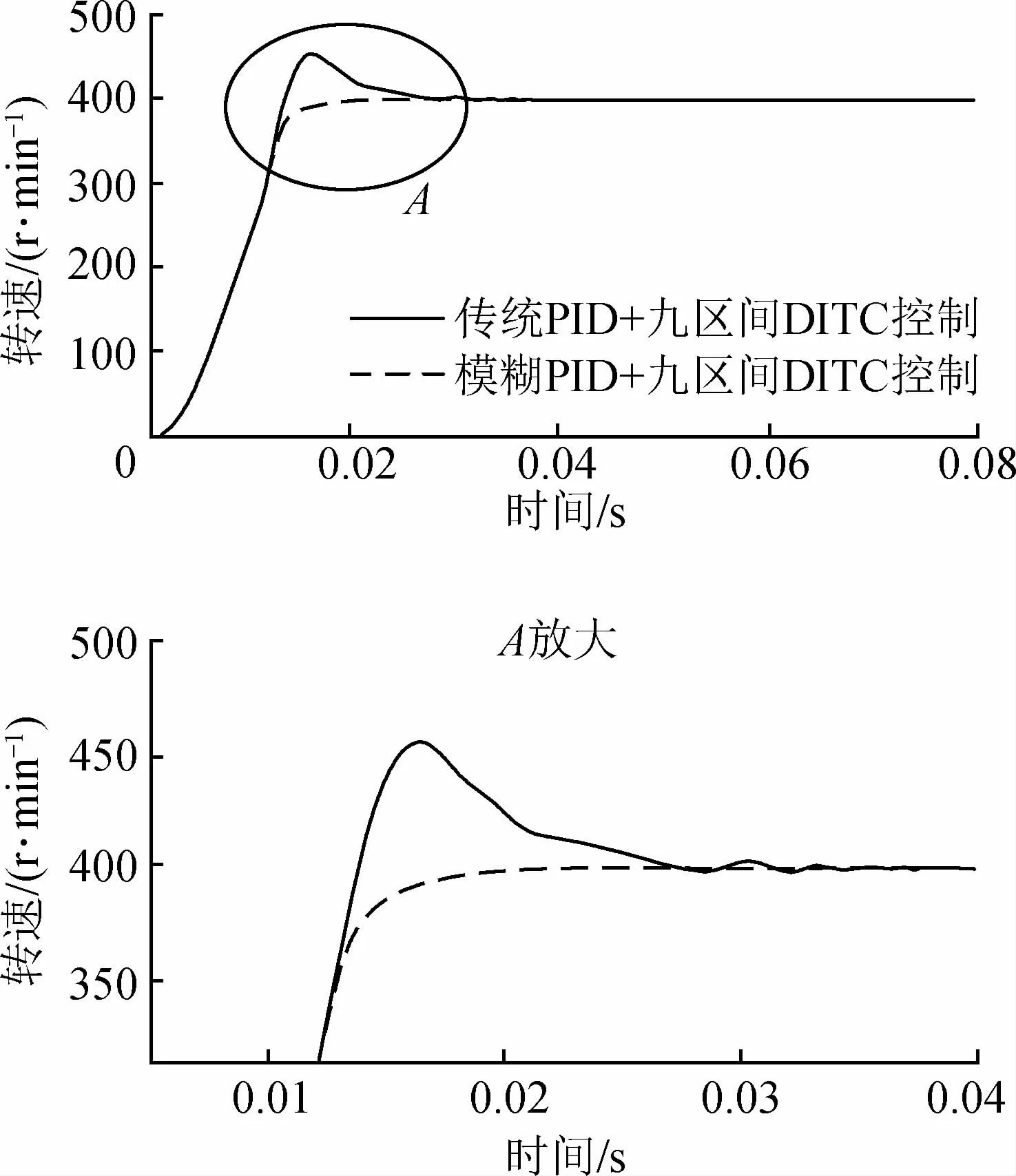
图17 模糊控制与PID控制对系统阶跃响应的影响比较Fig.17 Comparison of the influence of fuzzy control and PID control on system step response
5 结 语
本文针对开关磁阻电机,在已有的六区间DITC控制方式基础上,对两相交换区和滞环规则进行了重新划分和定义,提出了一种低速运行下减小SRM转矩脉动的九区间DITC控制方式,并在系统速度环节引入模糊PID控制,优化了系统动态性能。进行MATLAB/Simulink仿真分析,结果表明,该方法在低速下对SRM转矩脉动有较好的抑制作用,速度响应也优于传统PID控制。该方法对研究SRM直接瞬时转矩控制的多区间划分、滞环精确控制有一定参考和借鉴意义。
猜你喜欢
防爆电机(2021年6期)2022-01-17
防爆电机(2020年3期)2020-11-06
赢未来(2018年33期)2018-04-10
电子制作(2017年1期)2017-05-17
办公室业务(2016年9期)2016-11-23
现代畜牧科技(2015年11期)2015-10-21
地震研究(2014年1期)2014-02-27
中国新技术新产品(2014年4期)2014-01-24
科学之友(2011年7期)2011-04-12