三维激光扫描测量在植被参数提取中的应用
2022-09-02 10:15余洋刘昌华王世东杜庄陈志超张鹏鹏
河南理工大学学报(自然科学版) 2022年4期
余洋,刘昌华,王世东,杜庄,陈志超,张鹏鹏
(1.河南理工大学 测绘与国土信息工程学院,河南 焦作 454000;2.中国地质环境监测院,北京 100081)
0 引 言
三维激光扫描测量技术是一项空间点位信息采集的测绘新技术,通过激光快速扫描,迅速获取大面积目标表面的高分辨率点云数据,建立物体三维模型[1-2]。该技术具有速度快、实时性强、非接触性,以及高密度、高精度、数字化和自动化等特性[3],可以实现各种大型、不规则、非标准实体或实景三维数据的完整采集,目前已经广泛应用于地形测量、林业调查、公路桥梁测量、土石方工程、地质研究、建筑设计与测量、文物保护、灾害监测、逆向工程等领域[4-5]。近年来,我国学者将三维激光扫描测量技术应用到林业资源调查中,研究该技术在林业资源调查中的应用方法和应用前景,形成了一套较完整的三维激光扫描林业调查体系,并对比分析了该技术与传统测量方法在植物调查 中 的 应 用[6-7]。魏 学 礼 等[8]、李 超 等[9]基于实例详细介绍了三维激光扫描仪在林业调查中从数据采集、数据处理到有效信息提取的全过程,探索了不同仪器在植被扫描中的应用情况;冯仲科等[10]将三维激光扫描测量技术应用到大型树木树径测量、植物部分器官三维重建、植株生长动态监测等方面,分析了该技术的现实生态意义。
以上方法直接利用点云数据求取参数,精度较低。本文利用三维激光扫描测量技术获取风沙区采煤塌陷地中紫穗槐点云数据,通过点云数据建模获取紫穗槐株高、冠幅、冠高、体积等长势参数,并与卷尺实测的长势参数对比分析,探讨三维激光扫描技术在数据获取和分析中存在的问题,以及限制该技术应用的因素,并对该技术在大面积植被长势参数监测领域的发展提出建议。
1 研究区概况与数据获取
1.1 研究区概况
研究区位于中国西部风积沙区的神东矿区采煤沉陷地,属黄土高原与毛乌素沙地过渡带,坐标39°13′53″~39°21′32″N,110°12′23″~110°22′54″E,如图1所示。区内水资源短缺,年平均降雨量和蒸发量分别为414和2 100 mm,属典型的干旱、半干旱高原大陆性气候。地势起伏较大,海拔1 120~1 280 m,最大高差达276 m,大部分区域属风沙堆积地貌,沙丘、沙垄和沙坪交错分布,植被稀少,主要以干草原、落叶阔叶灌木和沙生类植被为主,没有大型乔木。本次研究扫描植物为风沙区生态绿化植物紫穗槐,直径8 mm左右,叶片大小约1 cm×2 cm,高20~90 cm,提取紫穗槐株高、冠幅、冠高和体积等长势参数,并与卷尺量取紫穗槐长势参数进行对比分析。
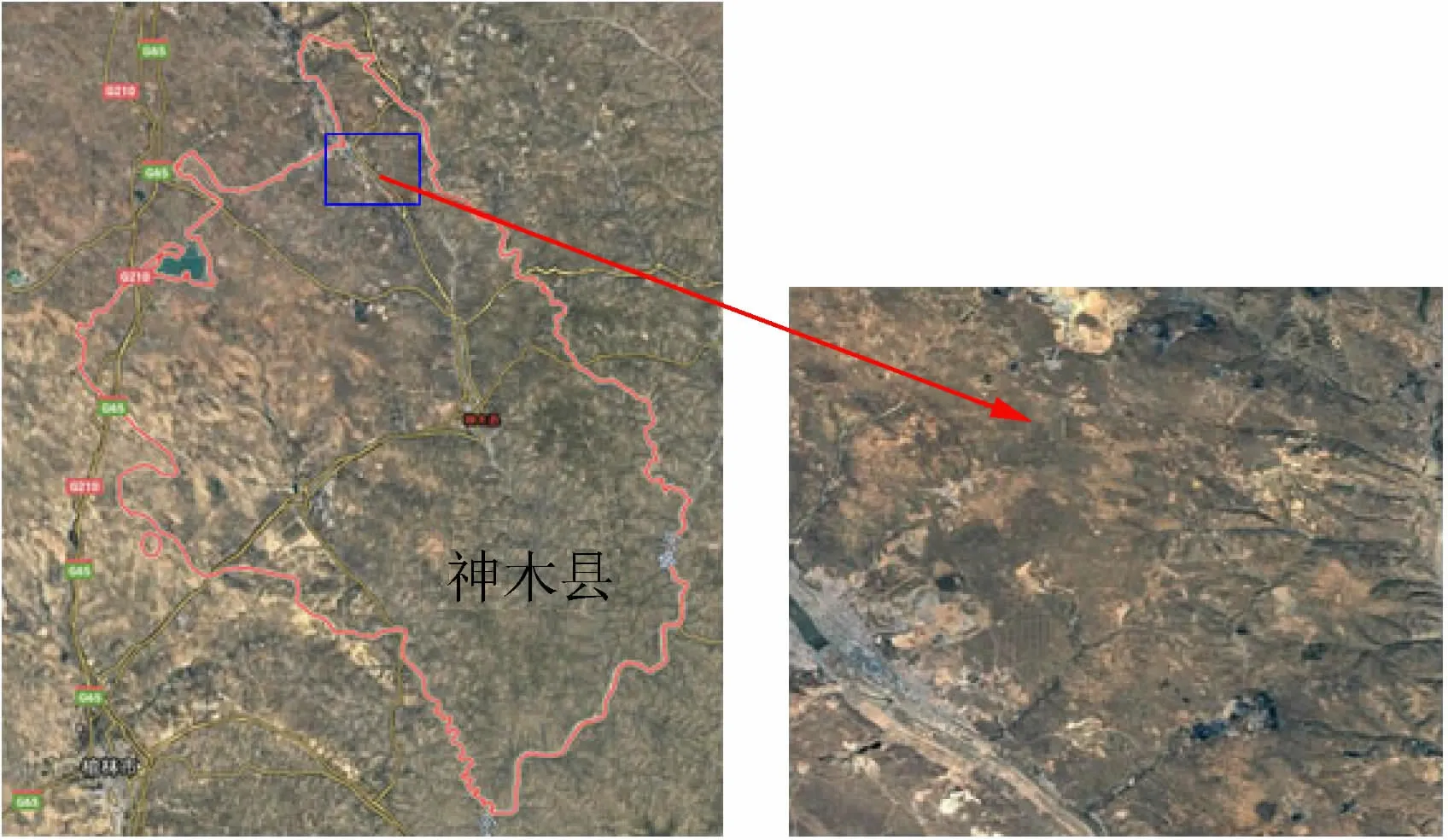
图1 研究区概况Fig.1 Overview of the study area
1.2 数据获取
扫描区域设定为约20 m×20 m的正方形,共扫描4站,放置5个平面靶标用于站间点云数据的拼接,其中1个靶标位于扫描区域中心,另外4个靶标分别位于扫描区域四周,测量现场见图2。

图2 测量现场示意图Fig.2 Scene diagram of measurement
为获取目标物体的全景点云信息,必须对目标物体360°全景扫描,并对数据无缝拼接。三维激光扫描测量技术作业方法的选择实质是点云数据拼接方法的选择,按照配准算法划分,分为基于ICP算法配准测量和基于六参数法配准测量;依据坐标系类型可划分为绝对拼接测量和相对拼接测量[14]。
(1)ICP算法配准测量是一种点集对点集的配准方法,即利用最小二乘法求取两个点集间的变换矩阵。初值条件较好时,该算法配准效果佳,但其计算量较大、对初值要求较高,在获取重叠区域时会影响点云质量且带来大量噪声[15]。
(2)六参数法配准测量是一种基于特征点的配准方法,该算法需人工选取至少3个点对,分别求取两幅点云间的3个旋转参数和平移参数。该算法精度受人工选取点对影响,一般需设置标靶点作为特征点对[16]。
(3)绝对拼接测量将多个测站的点云转换到某一实地参考坐标系。一般将扫描仪和常规控制测量相结合,利用全站仪和三维激光扫描得到同名点两套坐标,通过坐标转换,将每个测站的点云转换到实地坐标系中。这种方式点云精度均匀,配准精度高,不存在多测站配准的误差传递,但需布设控制网计算控制点坐标,因此工作量大、效率低[17]。
(4)相对拼接测量是将某一站数据设定为基准站,将其他各站的点云转换至基准站的坐标系中。通过在相邻测站布设至少3个公共标靶,在不同测站扫描后分别提取标靶中心坐标,通过相邻测站间的同名点将各测站的坐标系转换到基准站的坐标系中。与绝对拼接测量相比,该方法不用布设控制网,作业效率高。
本次测量在相邻测站间设立标靶,采用基于六参数法的相对配准方法对采集到的多站点云数据进行配准[18]。
1.3 三维激光扫描作业流程
三维激光扫描前须对试验区域进行实地踏勘,根据踏勘结果制定相应的作业实施方案,确定扫描的测站位置、测站数、扫描路线等作业前准备,并根据扫描作业设置标靶,再进行实时数据扫描。具体流程见图3。
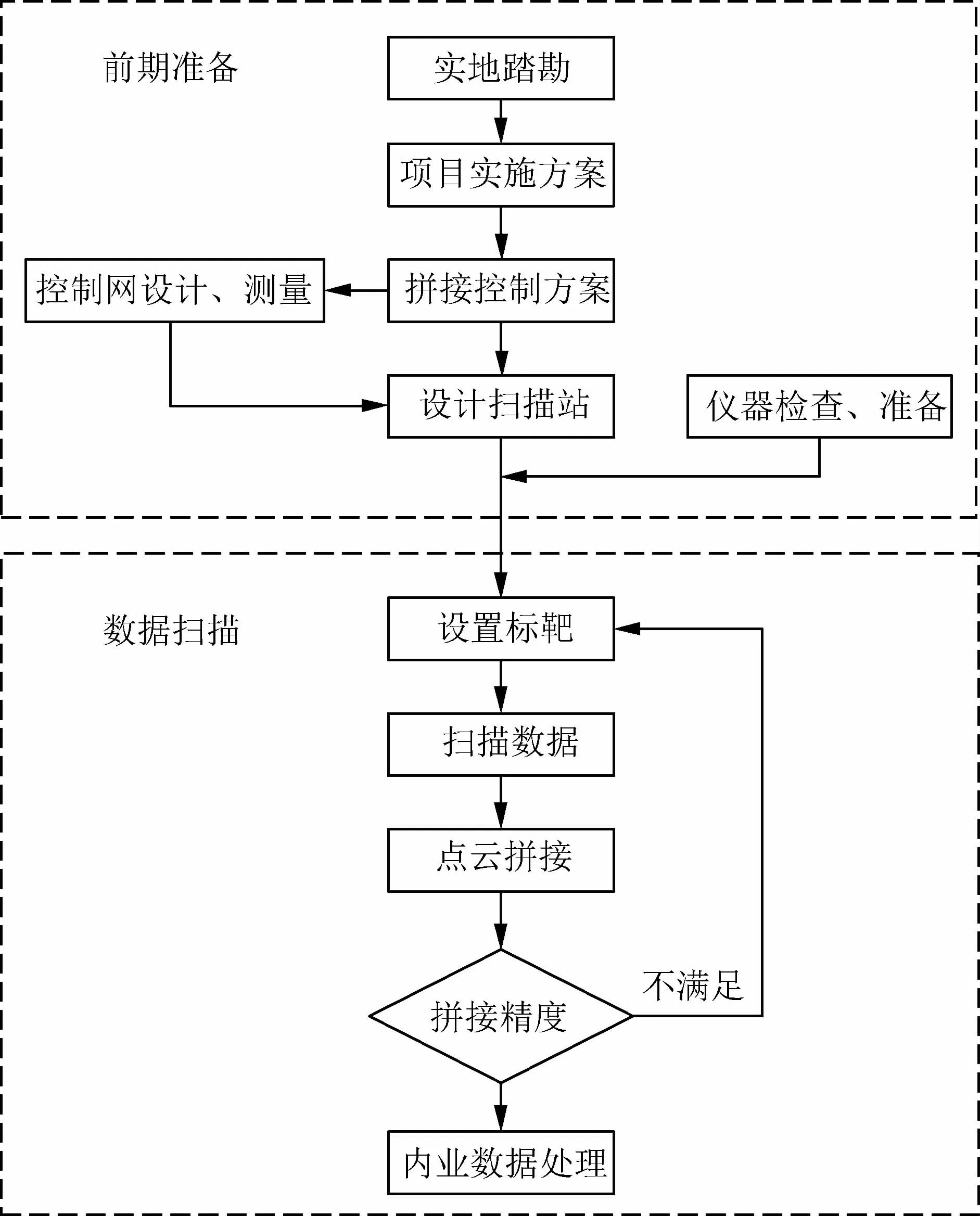
图3 三维激光扫描作业流程Fig.3 3D laser scanning working process
2 点云数据处理
2.1 点云数据处理流程
2.1.1 点云去噪
由于仪器本身和外界环境因素影响,三维激光扫描测量获取的目标物体原始点云数据存在大量粗差和系统误差,不能直接构建三维模型,须使用点云软件剔除非连续项和体外孤点等噪声点。
2.1.2 TIN模型构建
利用相邻点云数据间的三维关系建立不规则三角网,形成TIN模型。对目标地物进行模型逼近,扫描过程中可能存在数据缺失,导致形成的TIN模型出现孔洞,因此,必须利用点云数据的变化趋势对孔洞进行填充。
2.1.3 基于NURBS曲面内插法的紫穗槐叶片形 态建模
根据建立的紫穗槐TIN模型,建立紫穗槐叶片拓扑关系模型,即将叶脉曲线方向(叶长方向)定义为U向,垂直方向(叶宽方向)定义为W向,基于NURBS曲面内插法,计算点云数据间的节点矢量信息,从而求取NURBS基函数,并反求NURBS曲面的控制定点,按照式(1)逐点计算NURBS曲面上任意参数(U,W)(U∈[0,1],W∈[0,1])对应的数据点P(U,W),根据求得的控制定点和节点矢量构建紫穗槐叶片模型,并生成NURBS曲面。
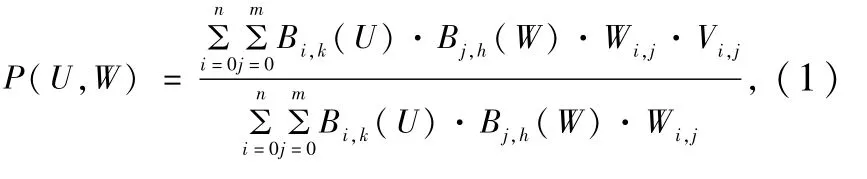
式中:Vi,j为 控 制 定 点;Wi,j为 权 因 子;Bi,k(U)和Bj,h(W)分别为沿U向的k次和沿W向的h次B样条基函数。
2.2 数据处理与分析
本次试验采集了24棵紫穗槐点云数据,并用卷尺测量了紫穗槐相关长势参数数据,运用三维激光扫描仪中cyclone v6.03软件对点云数据进行拼接和人工去噪,提取出每棵紫穗槐的点云数据,最后将紫穗槐点云数据导入Geomagic studio 2012中量取植株的冠幅(x,y方向)、株高和冠高。
由于扫描过程受外界环境影响较大,特别是风的影响,植株摆动较小,都会给点云数据造成很大误差,甚至是粗差,从而造成获取的点云数据在三维坐标系呈现的位置坐标存在偏差,不同视点扫描出的点云数据出现分层(图4)。此外,本次试验使用仪器的单点测量精度为±6 mm/50 m(±3 mm/25 m),相对于本次扫描的植株(直径约8 mm,叶片宽2~10 mm,厚约1 mm),该精度误差较大。虽然设置的扫描间隔为1 mm,但扫描得到的点云密度却大于1 mm/m3,紫穗槐点云数据并不能体现叶片的分布规律,也不能通过紫穗槐的主干点云数据切片提取地径(图5(a))。试验过程中常见问题有:(1)由于植物叶片位置随意,激光与叶片表面的夹角较小,仪器接收到的回波信号较弱,因此测量的数据噪声较大;(2)由于地势起伏较大,不同视点测距不一(测量精度不同),并有遮挡,造成数据缺失(图5(b))。
图4 地表点云分层现象Fig.4 Surface point cloud stratification
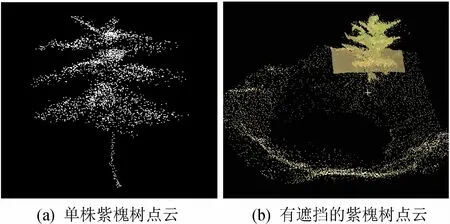
图5 紫穗槐植株点云Fig.5 Point cloud of amorpha
3 结果与讨论
3.1 三维激光扫描测量精度评价
将紫穗槐点云数据以txt格式导入geomagic studio2012软件中,量取冠幅(x,y方向取均值)、株高、冠高,并与卷尺测量结果比较(表1),扫描测量冠幅和实测值相对误差为-6.595~15.383,株高相对误差为-9.921~5.211;扫描株高大多数小于实测株高,二者相对误差为-4.481~1.787(仅21号植株扫描株高比实测株高的数据大1 cm以上);扫描冠幅和实测值没有明显规律,二者相对误差为-3.294~2.638。
对三维激光扫描测量得到的紫穗槐相关株高、冠幅长势数据与实测结果进行对比分析(图6~7),结果显示,两种方式测量的株高和冠幅最大差值分别为4.48和3.92 cm,株高平均相对误差2.78%,最大相对误差9.92%,冠幅平均相对误差4.89%,最大相对误差15.386%,两种方法的株高、冠幅测量结果相对误差较小。株高和冠幅差值最大的分别为16号和17号紫穗槐,相对误差最大的分别为11号和3号紫穗槐,扫描结果与卷尺测量结果差值分布没有明显规律。
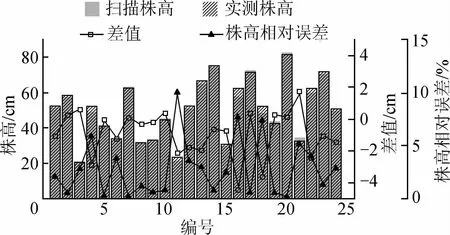
图6 实测株高与扫描株高对比示意图Fig.6 Contrastive schematic diagram of plant hetghts by actual measurement and scanning
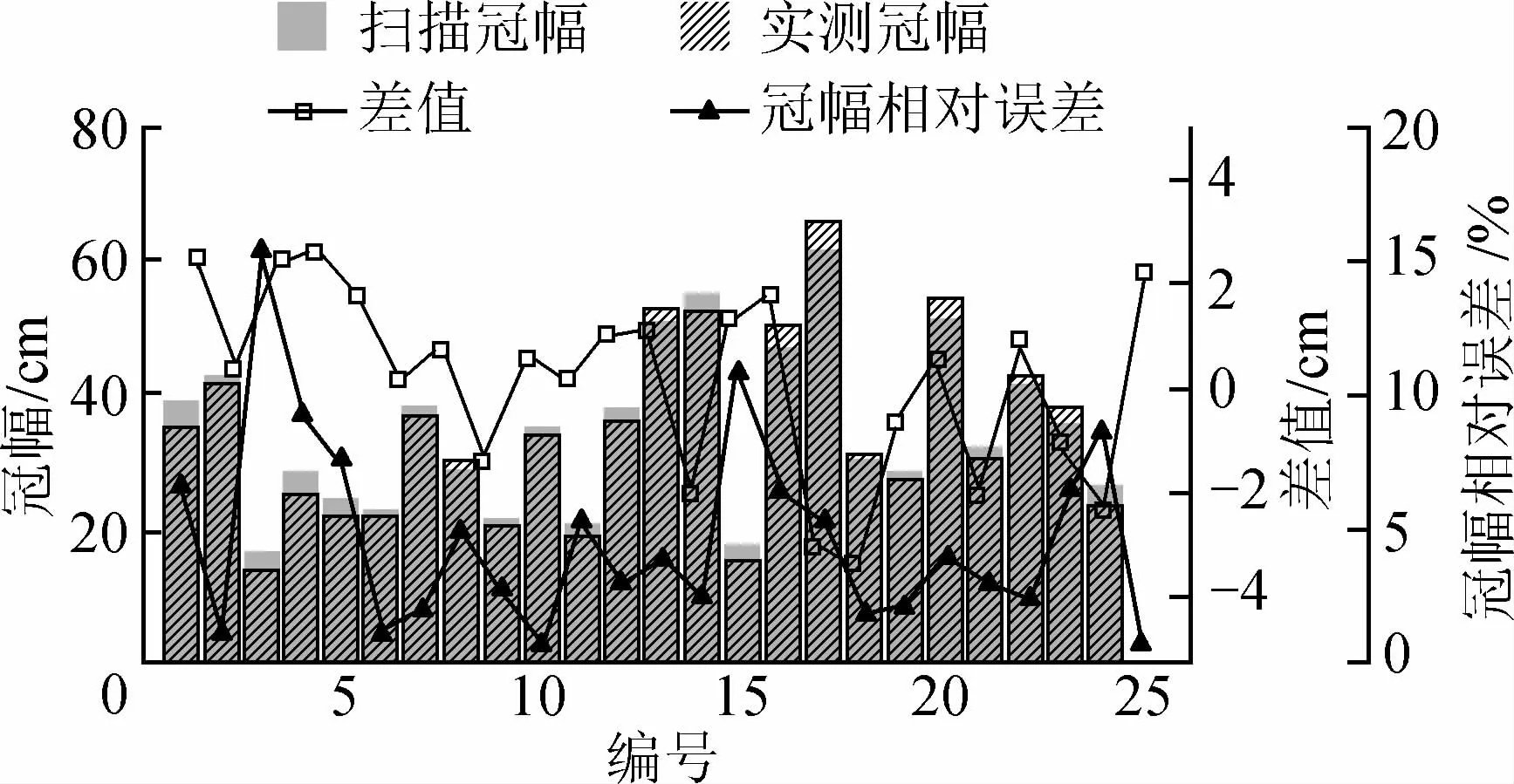
图7 实测冠幅与扫描冠幅对比示意图Fig.7 Contrastive schematic diagram of crown width by actual measurement and scanning
为了进一步探讨三维激光扫描测量结果的真实性和可靠性,以扫描值为自变量(x),实测值为因变量(y),分别建立株高和冠幅的相关变量关系,通过拟合得到相关回归方程,见图8~9。通过回归分析,株高的回归方程为y=1.008 84x+0.487 69,复相关系数R2=0.992 31,置信度为95%;冠幅的回归方程为y=1.089 83x-3.307 21,复相关系数R2=0.989 15,置信度为95%。说明三维激光扫描数据与卷尺实测数据密切相关,三维激光扫描技术测量结果可信,理论上可以代替人工测量方法提取植物生长参数。
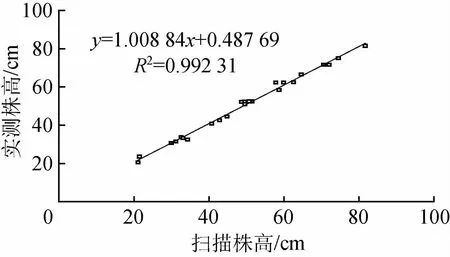
图8 株高回归分析Fig.8 Regression analysis of plant height
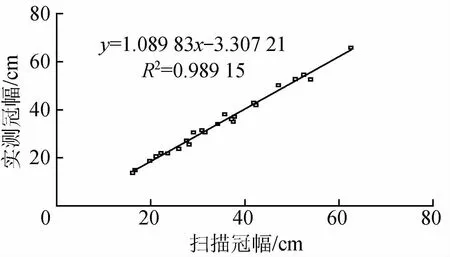
图9 冠幅回归分析Fig.9 Regression analysis of crown width
3.2 扫描参数与体积相关性分析
基于3D点云体素法,构建紫穗槐点云数据模型,并利用体素化后的模型特征在MATLAB平台计算紫穗槐体积,见表1。为了体现扫描参数与体积间的相关性,分别选取扫描株高、冠高(或扫描冠幅、冠高)为自变量(x1和x2),体积为因变量(y),进行相关性分析,得到回归方程(株高-冠高-体积)y=0.004x1+0.102x2-1.347,复相关系数R2=0.578;(冠幅-冠高-体积)y=0.083x1+0.006x2-0.767,复相关系数R2=0.471,见图10~11。由紫穗槐体积与扫描数据的相关性可知,复相关系数R2较小,说明紫穗槐体积与株高、冠幅、冠高的相关性均较小,即株高、冠幅和冠高不能直接决定紫穗槐体积大小。体素法建立在点云之上,计算体积大小取决于点云数量,因此计算体积最接近紫穗槐实际体积(表2)。
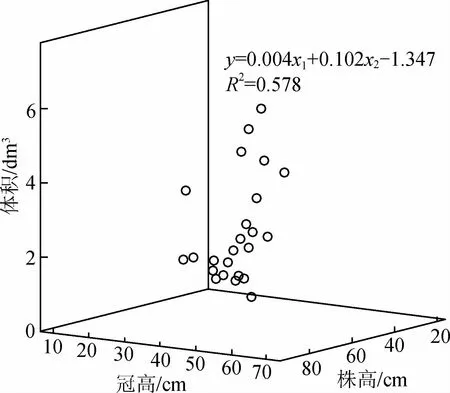
图10 扫描株高、冠高与体积之间的相关性Fig.10 Correlations between scanning,plant height crown widthand volume
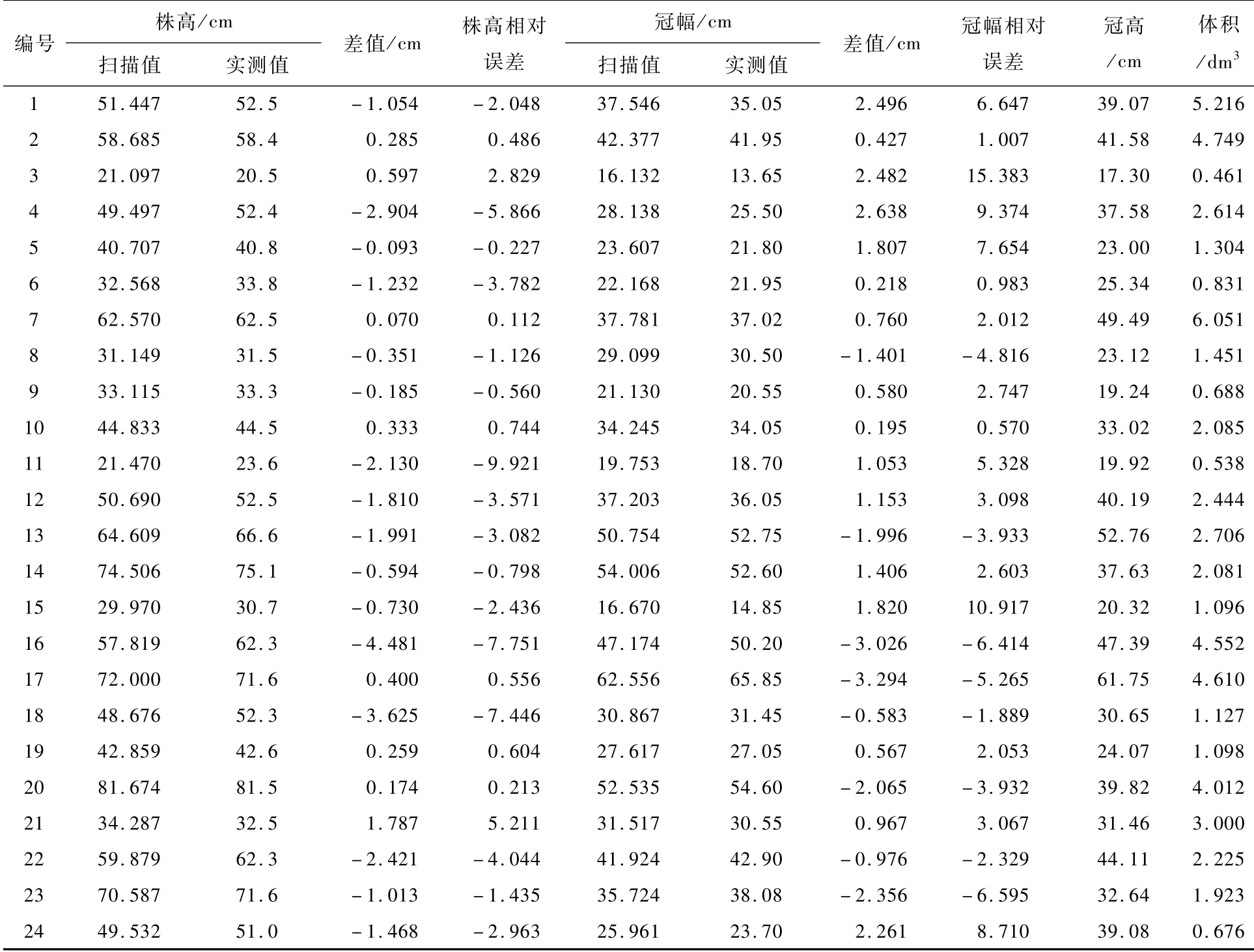
表1 紫穗槐长势参数的扫描结果与卷尺测量结果对比Tab.1 Comparisons of scanning results and steel tape measurement results of amorpha growth parameters
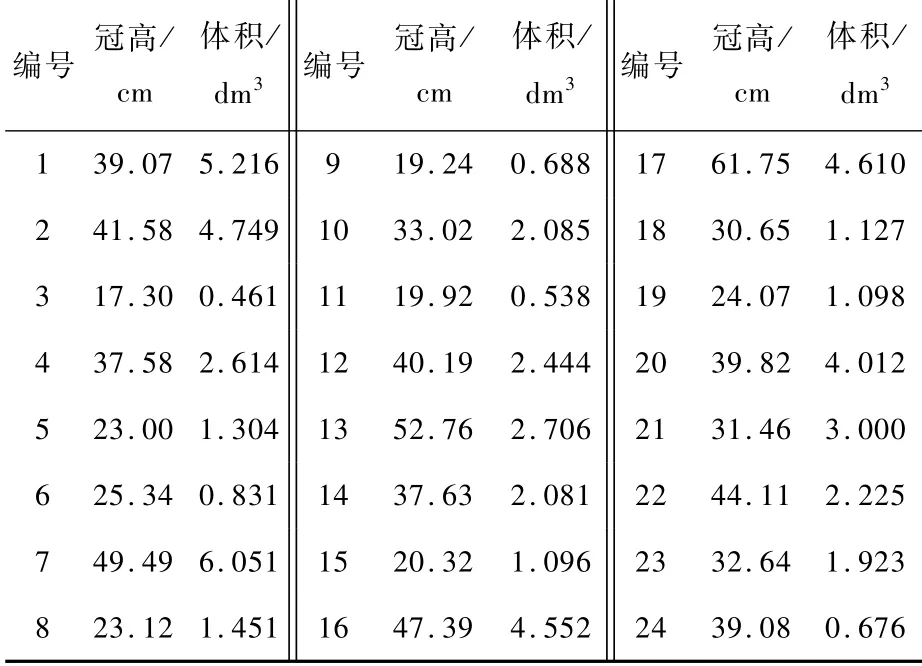
表2 三维激光扫描测量紫穗槐冠高与体积统计Tab.2 Crown height and volume statistics of amorpha by 3D laser scanning seasurement
4 结 论
(1)本文对紫穗槐株高、冠幅、冠高等长势参数以三维激光扫描和人工测量方法进行对比分析和相关性分析,结果显示三维激光扫描测量和人工测量结果相关系数R2=0.989 45,置信度大于95%,表明三维激光扫描测量技术完全可以替代人工测量方法。
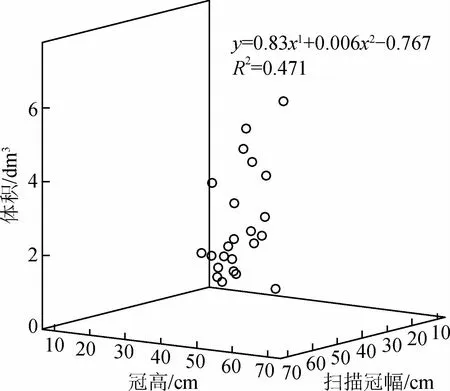
图11 扫描冠幅、冠高与体积之间的相关性Fig.11 Correlations between scanning crown width,crown height and volume
(2)三维激光扫描测量技术可通过后处理获取植被体积等人工方法难以获取的参数信息,另外三维激光扫描测量技术不仅可以获取植被三维数据信息,还可以提供植被影像信息,实现了植被多层次三维模型显示。因此,三维激光扫描测量技术为植被(尤其是灌木植被)三维建模和无损监测提供了一种新方法,对植物数字化具有重要意义。
(3)三维激光扫描测量技术易受仪器及野外环境干扰,提取的参数信息存在误差。因此三维激光扫描技术要在植被参数提取中实现大规模使用可从以下两方面努力:在数据获取方面需提高单点测量精度、点云数据配准精度和抗干扰能力;在数据处理方面,需二次开发点云软件,使其在适用于林业领域。如:可直接对植被点云数据进行自动化建模,并根据模型直接获取植被长势参数。
猜你喜欢
今日农业(2022年1期)2022-11-16
安徽农业科学(2022年19期)2022-10-29
今日农业(2022年16期)2022-09-22
绿色科技(2022年11期)2022-07-02
测绘地理信息(2022年2期)2022-04-02
绿色天府(2022年2期)2022-03-16
林业科技情报(2021年3期)2021-09-01
今日农业(2020年17期)2020-10-27
导航定位与授时(2020年4期)2020-07-29
全球定位系统(2020年1期)2020-03-31