
船舶海上超视距无线自定位技术研究
2022-09-02 00:30:12王晓旺梁西铭
现代导航 2022年4期
李 强,王晓旺,梁西铭
船舶海上超视距无线自定位技术研究
李 强1,王晓旺2,梁西铭2
(1 海装重大专项装备项目管理中心,北京 100161;2 中国电子科技集团公司第二十研究所,西安 710068)
针对卫星拒止环境下,海上船舶及其编队对导航定位性能的最低保障需求,开展了一系列研究。首先分析了线阵综合测角的基本理论,用遗传算法对线阵进行了综合仿真,用谱估计对线阵测角进行了研究;其次对圆阵综合测角进行了理论分析,对圆阵、圆柱阵进行了综合计算和谱估计测角仿真,分析了不同阵元数、信噪比等情况下的测向夹角情况,并对多信号同时测角情况进行了仿真;最后阐述了夹角定位的基本思想,提出了船舶传感器构阵测角的可能形式,并对定位数据进行了分析及滤波优化。研究结果表明,相关技术对船舶海上导航定位有积极的参考意义。
船舶;拒止环境;传感器;机会信号;超视距;自主定位
0 引言
在卫星拒止环境下,海上船舶及其编队对导航定位性能的最低保障需求一直以来都十分迫切。部分国家的机构、大学和企业在该领域开展了一些技术研究。
美国有机构研究了GPS信号拒止环境下的部分无线电导航替代方法[1],有大学研究了GPS信号拒止环境下的自主测距导航方法[2],美国国防高级研究计划局在拒止环境中的协同作战项目中构建了GPS拒止环境,用来进行蓝白军的对抗[3]。学者李冀研究了国外提升卫星信号在拒止环境下导航新技术,其中微惯、无线电、随机信号等技术仍是主要方向,可以降低平台对卫星信号的依赖[4]。
船舶在中远海航行时,若卫星导航信号长时间受到干扰,平台惯导的定位误差将逐渐增大,反介入∕抗拒止成为技术研究的热点。胡尧[5]、张耀[6]等专家分别对美国的反介入/区域拒止情况进行了分析。D.P.Koch[7]等专家对GPS信号拒止环境下的滤波方法和自动测距导航做了深入研究。田俊曦[8]、刘莉[9]等专家对卫星拒止环境下无人系统的关键技术进行了分析研究。也有专家对全源定位与导航理论框架[10]、SINS/GNSS[11]等技术进行了研究。事实上在中远海区卫星拒止环境下,利用已知位置区域的无线电发射台信号(短波、中波、长波、甚长波等),进行超视距地波、天波或波导波的信号接收,利用角度信息开展导航定位技术研究将变得十分有意义。
已有的文献中关于角度信息定位的技术多为近距离或城市地域,且频率较高。文献材料中尚未有针对海上船舶的集成传感器进行卫星拒止下的超视距自定位技术研究,亦未见有相关报道。对于远海船舶而言,在复杂拒止条件下,急需有新的定位技术辅助惯导,形成集成备份系统。
本文采用短波、中波、长波等频段的远距离超视距信号,利用已知台站位置信息,进行测角定位研究。以船舶上的桅杆传感器、通信高频阵列、抱围圆环阵为基础,配合海面无人平台,灵活性构建出船舶海上接收阵形,打破传统格局,实现超视距协同定位的同时,完成通、导、侦的一体化信息融合。分析了基于遗传算法线的线阵和圆阵综合情况;对谱估计测向进行了研究,分析了不同阵元数、信噪比等情况下的测向夹角情况。阐述了夹角定位的基本思想,提出了船舶上的传感器集成构建复合测角的可能形式,并对可能的技术发展进行了展望。
1 线阵综合测角
1.1 理论分析




对应的输出平均功率为:
展开为:
信源数为:




1.2 仿真分析


图1 二分之一波长间距阵增益
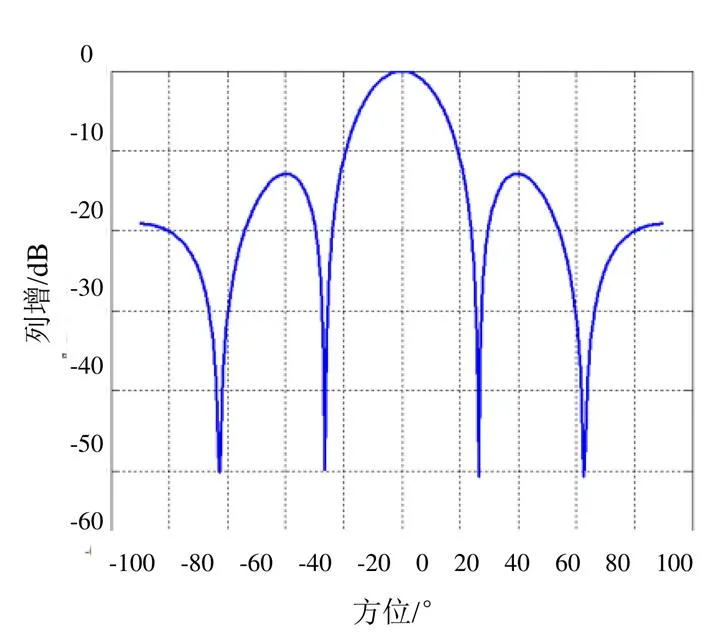
图2 四分之一波长间距阵增益
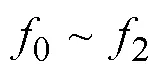
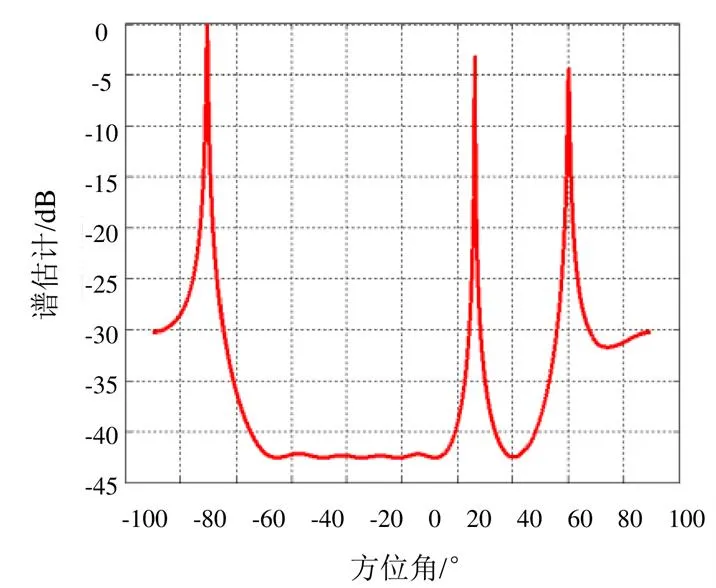
图3 S/N=5时三路信号的测向二维图

图4 S/N=5时三路信号测向夹角极坐标图
图4中三路信号分别为-70.11°、26.51°、60.21°方位面的来波信号。这三路信号测向角精度优于0.01°,曲线反映在极坐标图上呈现出了良好的方位面夹角特性。
2 圆阵综合测角
2.1 理论分析
圆阵测角在各个任务系统设计中,多采用均匀圆阵和均匀圆柱阵等形式。对于海上船舶而言桅杆上的圆环阵,集成舰岛上的抱围圆阵均可以用于导航的信号增强和谱估计测向定位。
均匀圆阵如图5所示,波达方向矢量如式(12)所示:

阵的方向图函数可直接由阵因子表示为:

图5 均匀圆阵示意图
依此利用无测量误差时来波方向与圆阵多条基线的相位差矢量一对一关系,反演得到来波方向,即最小二乘法测向。该方法在预设特定参数时,测向精度可实现0.1~1°。

则方位角误差的克拉美—罗界为:



当幅度加权系数为1时,满足均匀分布,方向图简化为:

2.2 仿真分析
依据上述分析进行仿真计算,圆环阵单元数为8,半径波长比0.8,信噪比为10 dB,方位角扫描范围1~360°。针对海上不同方向的四路超视距信号进行方向和夹角估计,这些被测台站的已知指纹信息可以反向确定船舶的精确位置。对应结果如图6和图7所示。
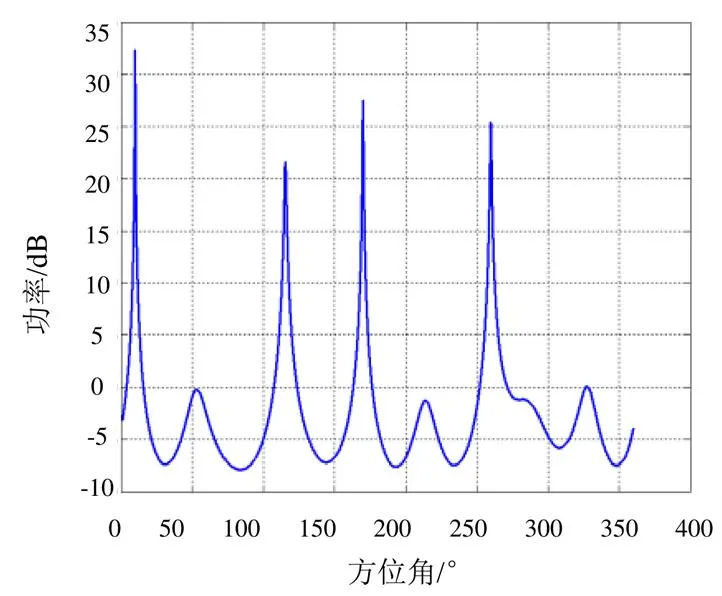
图6 四路信号测向二维图

图7 四路信号测向夹角极坐标图
在阵元数增加,半径波长比调整优化的基础上,该种方式的测向精度可达到0.01°。
对于船舶上大抱围集成圆环阵,阵元数较多、阵元半径大于波长时,阵主波束指向明显。对通、导、侦、探信号的方位拾取性明显。仿真设定数据为单层圆柱、阵元数20、阵元半径与波长之比2时,对应结果如图8和图9所示。
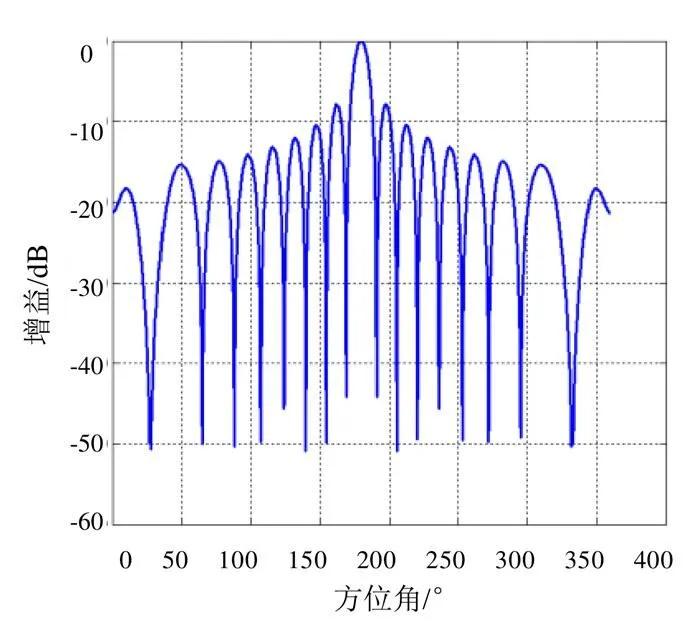
图8 方位面二维方向图

图9 三维方向图
3 海上超视距自定位
3.1 夹角定位基本思想
假定某海区内1、2、3、4为已知位置的远程发射台站,为某船舶编队的一个任务位置点。在离线地图上,位置点和发射台1、2、3、4的方位面互夹角为固定值。即发射台1、2、3、4中任意三个台在位置点处的夹角值,可反向确定出该点的坐标位置。在任务海区卫星信号拒止时,船舶平台自身相对发射台1、2、3、4的方位面夹角信息能够采取前面所述方法拾取。船舶编队能够通过已知位置的发射台实现自身定位和导航,机理如图10所示。
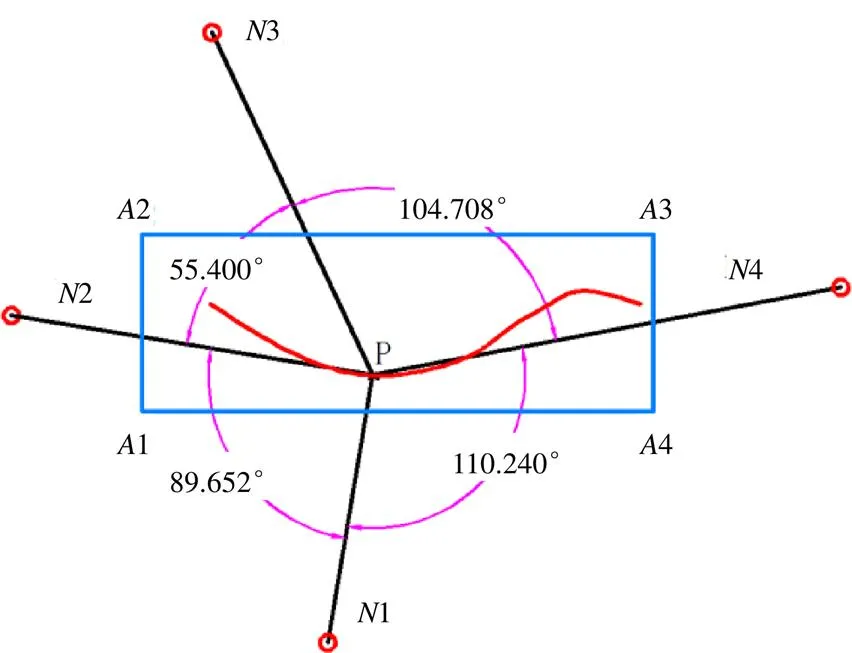
图10 已知发射台夹角定位示意图
一般有有三个发射台站1、2、3时,对于位置可推出唯一位置点,更多的发射台信号将有利于提高位置点的定位精度。图10中的蓝色区域示意为任务海区(其中1-2-3-4构成的长方形区域为任务规划区,可在接收端库文件中实现快速角度查表定位),红色线为实际航迹线。
3.2 船舶传感器测角构阵
现代船舶上已逐步实现了通信、探测、导航、对抗、侦查等多种传感器的综合集成应用。船舶导航系统也实现了惯性、卫星、长波、船舶自动识别系统(Automatic Identification System,AIS)[12-14]等多种方式的复合,对应的桅杆技术和专利也多有报道。
位于工作海区的船舶及其编队,其船舶上的抱围圆阵、船舶桅杆圆柱阵、船舶左右舷线阵、新型的舰岛测向圆阵,以及母船与无人船构建的船舶海面编队线阵,在海区卫星信号长时间失效时,可以依据事先预设的程序,利用部分或全部船舶传感器测角构阵实现方位面超视距测角定位导航功能。在无人单体平台上的定向传感器阵列在安装位置和布局方向上完全一致。各子平台之间通过光信号保持编队阵型,主控软件可实时给出各个单元的加权因子。船舶海上超视距构阵定位的基本概念如图11所示。
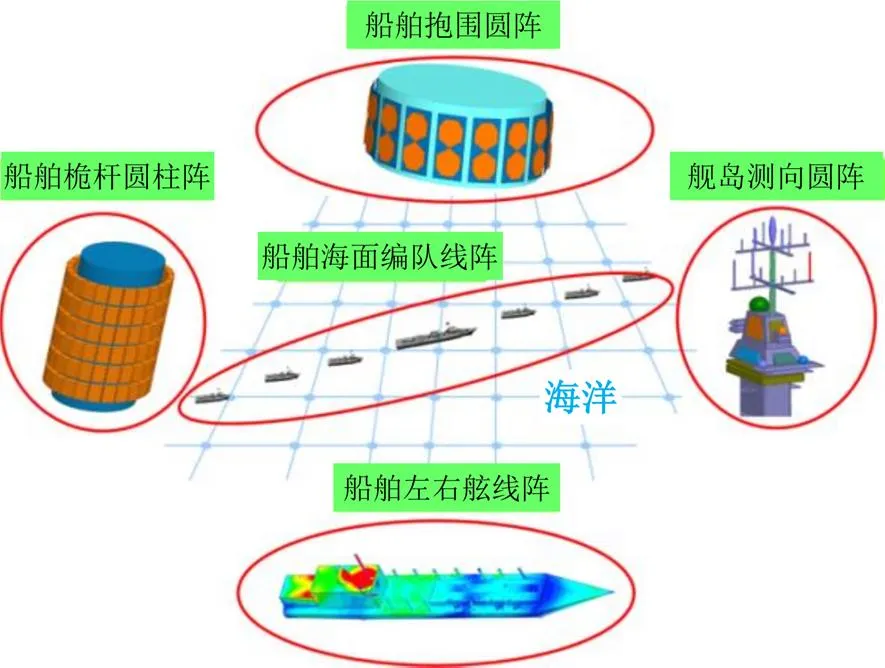
图11 船舶海上超视距构阵定位示意图
船舶通信、导航等系统的综合集成设计已是大势所趋,传感器测角定位阵的软硬件可与其它系统进行集成一体化设计实现。
传统的长波导航采用圆圆定位或双曲线定位,其多台链的发射台[15-17]可与其它已知节点的合作/非合作短波、中波、长波台共同构成远场定位辐射源。
3.3 定位数据分析及滤波优化
在船舶任务海区构建线阵测角,船舶左右舷的线阵可分别完成0~180°、180~360°的方位面谱估计测角。按照本文所述方法,卫星拒止时在任务海区对海上可用的短波、中波、长波等超视距辐射源进行甄别,按照已构建的离线数据图谱(内嵌在芯片内)进行集群位置点的夹角测量和位置推算。
在海面300×300 km范围内,船舶及其编队采用线阵时侦收到超视距外4个台站的测向定位偏差约为十米级,在经过卡尔曼滤波后偏差接近米级。船舶线阵实测偏差和滤波偏差比较图如图12所示。

图12 船舶线阵实测偏差和滤波偏差比较图
当侦收次数加大,或接收到的台站信号增加时,这一偏差降为米级并逼近真值。对海上船舶在超视距外的4个台站(、、、)接收到的角度差(-、-、-)进行分析比较,如表1所示。

表1 4台站三夹角测试数据表
动态航行时,船舶在某卫星拒止海区依此方法得到的定位轨迹如图13所示。

图13 船舶海上超视距定位轨迹图
4 结论
本文研究了线阵综合测角、圆阵综合测角的理论和方法。分析了在卫星拒止环境下,用已知站点的非同源海上超视距信号进行测角定位。将传统的阵列化技术分布在船舶及其编队的抱围圆阵、桅杆圆柱阵、船舶左右舷线阵、舰岛测向圆阵、及船舶海面编队线阵上,用船舶传感器测角构阵的方法来实现海上超视距自定位功能,实现了平台在通、导、侦等领域的一体化复合应用。相关的理论分析、仿真图表、分析数据能够证明文章主题的新颖性和实用性,其思想对相关技术的发展有积极的参考价值。
[1] Mark S. Asher, Stephen J. Stafford, et al. Radio navigation Alternatives for US Army Ground Forces in GPS Denied Environments[C]. International Technical Meeting of The Institute of Navigation, 2011(1): 508-532.
[2] Mark C. Lesak. ODOMETRY FOR AUTONOMOUS NAVIGATION IN GPS DENIED ENVIRONMENTS[D]. The Colorado School, 2019(6).
[3] 李磊,王彤,胡勤莲,等. DARPA拒止环境中协同作战项目白军网络研究[J]. 航天电子对抗,2018(6):54-59.
[4] 李冀. 国外提升卫星信号在拒止环境下导航定位能力的新技术[J]. 导航定位学报,2013(6):55-59.
[5] 胡尧,李亚雄,吴小鹏. 美军应对反介入/区域拒止战略分析[J]. 飞航导弹,2019(11):66-69.
[6] 张耀,宋鹏超,李漫红,等. 美国突破反介入/区域拒止能力的武器发展与尝试[J]. 飞航导弹,2019(8):10-14.
[7] D. P. Koch, D. O. Wheeler, R. Beard, et al. Relative Multiplicative Extended Kalman Filter for Observable GPS-Denied Navigation[J]. All Faculty Publications, 2017(8).
[8] 田俊曦. GNSS拒止环境下的多飞行器协同导航关键技术研究[D]. 成都:电子科技大学,2020(6).
[9] 刘莉,董欣心,葛佳昊,等. 拒止环境下无人系统作战模式及关键技术[J]. 战术导弹技术,2020(4):167-174.
[10] 戴海发,卞鸿巍,马恒,等. 全源定位与导航的统一理论框架构建[J]. 导航定位与授时,2018(11):9-16.
[11] 崔冰波. GNSS拒止环境下FOG-SINS/GNSS组合导航关键技术研究[D]. 南京:东南大学,2017(9).
[12] 于树本. 船舶组合导航系统研究[D]. 西安:西安电子科技大学,2007(1).
[13] 薛一东. E-Navigation战略下的船舶引航发展[J]. 中国航海,2017(1).
[14] 倪天颖. 船舶导航集成系统的分析与研究[J]. 船舶物资与市场,2019(3):40-41.
[15] LACHAPELLE, G., B. TOWNSEND, D.W. HALAYKO. Analysis of GPS and Loran-C Performance for Land Vehicle Navigation in the Canadian Rockies[J]. IEEE AES Magazine, 1992(7): 24-28.
[16] Younghoon Han, Pyo-Woong Son. A Measurement Based Accuracy Prediction of Terrestrial Radio Navigation System for Maritime Backup in South Korea[C]. 32nd International Technical Meeting of the Satellite Division of the Institute of Navigation, 2019(9).
[17] R. J. Hartnett, K. C. Gross, G. J. Czerwonka, et al. Digital Down Converter (DDC) H-Field Loran-C Navigation Receiver: Performance Analysis, Flight Test Update, and GPS/WAAS Integration[J]. Proceedings of the 2002 National Technical Meeting of The Institute of Navigation, 2002(1): 428-438.
Research on Maritime Over-the-Horizon Wireless Autonomous Positioning Technology for Ships
LI Qiang, WANG Xiaowang, LIANG Ximing
Series of studies have been carried out to meet the minimum requirements of navigation and positioning performance of marine ships and their formations in the satellite denial environment. Firstly, the basic theory of linear array comprehensive angle measurement is analyzed, the linear array is simulated by genetic algorithm, and the linear array angle measurement is studied by spectral estimation. Secondly, the comprehensive angle measurement of circular ring array is analyzed in theory, the comprehensive calculation of circular ring array and cylindrical array and the simulation of spectral estimation angle measurement are carried out, the angle measurement of direction under different array elements and signal-to-noise ratio are analyzed, and the simultaneous angle measurement of multiple signals is simulated. Finally, the basic idea of angle positioning is described, and the possible forms of angular measurement by ship sensor array are proposed. The positioning data are analyzed and filtered. The results show that the related technology has positive reference significance for the navigation and positioning of ships.
Ships; Denial Environment; Sensor; Signal of Opportunity; Over-the-Horizon; Autonomous Positioning
V279
A
1674-7976-(2022)-04-235-07
2022-07-06。
李强(1980.02—),黑龙江嫩江人,工程师,主要研究方向为指挥自动化。
猜你喜欢
中学生数理化·七年级数学人教版(2020年12期)2021-01-18 06:57:42
语数外学习·高中版上旬(2020年8期)2020-09-10 07:22:44
中国计算机报(2020年9期)2020-03-25 15:10:34
西南石油大学学报(自然科学版)(2018年4期)2018-08-02 05:42:38
航天电子对抗(2018年3期)2018-07-14 02:53:30
电子测试(2018年6期)2018-05-09 07:31:54
北京航空航天大学学报(2017年7期)2017-11-24 05:27:26
汽车与安全(2017年9期)2017-09-29 01:36:57
居业(2017年5期)2017-07-24 13:56:27
广西电力(2016年5期)2016-07-10 09:16:44
