
电离层以及多径对载波相位平滑码伪距的误差分析
2022-09-02 00:30:26杨佳旭曹有权
现代导航 2022年4期
张 昂,杨佳旭,曹有权,李 斌
电离层以及多径对载波相位平滑码伪距的误差分析
张 昂,杨佳旭,曹有权,李 斌
(中国电子科技集团公司第二十研究所,西安 710068)
当今业界主要采用载波平滑码伪距技术(Hatch滤波器)输出平滑伪距消除多径和热噪声等带来的影响,从而减少误差和改善定位精度。由于电离层对载波和伪距的测量值作用是相反的,那么采用载波平滑码伪距技术后输出的平滑伪距就会包含这些电离层时延引入的平滑误差,从而影响定位精度,甚至危及生命安全。因此,研究电离层对载波平滑码伪距的影响十分必要和重要。通过添加电离层时间梯度模型和多径模型,对平滑滤波器的输出误差进行理论分析,并对上述分析结果进行仿真验证,从而为选取电离层时间梯度监测门限值、选择合适滤波常数等场景提供理论基础。
电离层;时间梯度;多径;平滑滤波器;误差分析
0 引言
众所周知,电离层对载波和码伪距有着相反的延迟效应:对载波有滞后延时,对伪码有超前延时。一旦电离层电子数总量(Total Electron Content,TEC)的含量发生改变,在电离层相反的作用下,载波和码伪距会向相反方向,以两倍的相对速率产生码载分歧。接收机通常使用载波平滑码伪距的方法降低多径和热噪声等的影响,在多数情况下,该方法可以降低误差并改善定位精度。然而,这种方法的前提是假设电离层是无变化的,但是在实际情况下这种假设几乎不可能发生。尤其在电离层活跃的情况下,采用载波平滑码伪距技术引入的电离层误差将大大超过该技术所消除的多径和热噪声等其他误差,不仅不能改善精度反而会恶化精度[1]。在某些生命安全领域例如GBAS,一旦此误差被传递进差分修正值中,则会造成明显的威胁[2-3],甚至危及生命安全。我国的地理位置在北半球中低纬度,局域地区电离层异常活动明显,因此对电离层异常活动进行研究和分析具有重要的意义[4]。
1 理论分析
1.1 载波相位平滑码伪距简介

将式(1)按照误差是否共模分类,重新改写为式(2):
式中,为伪距和载波的公共部分,包含真距、钟差(包括接收机钟差和卫星钟差)、对流层延时等;是电离层误差(延迟和超前);是码伪距的多径延迟;是载波偏差(整周模糊度),具体如 图1所示[6]。
图1中电离层变化曲线(粉色曲线)以较小的变化率缓慢上升,导致了滤波器输出产生一个偏差——滤波器输出的平滑码伪距稍微偏低于原始码伪距均值。为了解产生这种情况的原因,本文将详细讨论滤波器的原理,并定量给出电离层对平滑滤波器的影响。


1.2 电离层模型
电离层会随着太阳的光照等其他因素的影响在不同时段存在变化,但是这种变化是可接受的。然而,电离层也存在着剧烈变化,主要分为两种,一种是电离层风暴,另一种是电离层闪烁。电离层风暴是指在太阳活动等影响下,电离层中的电子数总量在很短时间的水平距离内发生不稳定或者急剧变化,导致信号在传输过程中延时发生变化。电离层产生闪烁现象主要由于电离层不均匀体变化。由于宇宙中星体经常会发生剧烈的物质喷发和能量波动,大气层中出现的不稳定不均匀物质的变化,导致电离层的电子密度会产生不均匀、随机、非线性的变化,产生电离层闪烁。对于卫星导航系统,电离层闪烁会引起导航卫星信号穿越电离层时,导航信号的振幅和相位产生剧烈的增大或减小;对于卫星导航信号,当卫星信号经过大气层时,码相位测量值产生延迟误差,而载波相位测量值产生超前误差,导致码和载波出现不一致[7]。


1.3 误差分析
1.3.1 电离层误差影响分析

对式(5)稍作变换,可以得出式(6):

对该一阶微分方程求解,可以得到误差解析解:

1.3.2 多径误差影响分析
若只考虑多径对平滑滤波器的影响,则忽略电离层和初始误差等因素的影响,结合式(7)可得:


在该情况下,滤波误差随着时间增长将趋近于稳态,其幅值与多径幅值相等。该结果表明滤波器无法对长周期项的误差进行有效滤除。上述分析与平滑滤波器属于低通滤波器的特性相一致。
对于动态接收机来说,多径误差的大小显得相当随机。假设多径是不相关、零均值的高斯白噪声,在该情况下,滤波误差的期望均值也将为0[6]。本文中也将对该情况进行仿真验证。
结合滤波器属于低通滤波器的特性进行分析,不相关、零均值的高斯白噪声属于高频误差可以有效过滤,而长周期项的低频误差则不可被消除或者无法完全消除。
2 仿真分析
本文把电离层时间梯度、更改滤波常数和添加多径信号作为测试场景的自变量,对Hatch平滑滤波器的平滑误差进行分析和评估。本次测试采用数据处理服务器接收高精度卫星导航板卡然后对数据后处理的方式进行结果分析。测试场景硬件连接关系如图2所示,测试场景如表1所示,测试环境软硬件信息如表2所示,高精度卫星导航板卡(Novatel OEM 729)和数据解析记录软件分别如图3和图4所示。

图2 测试场景及连接关系
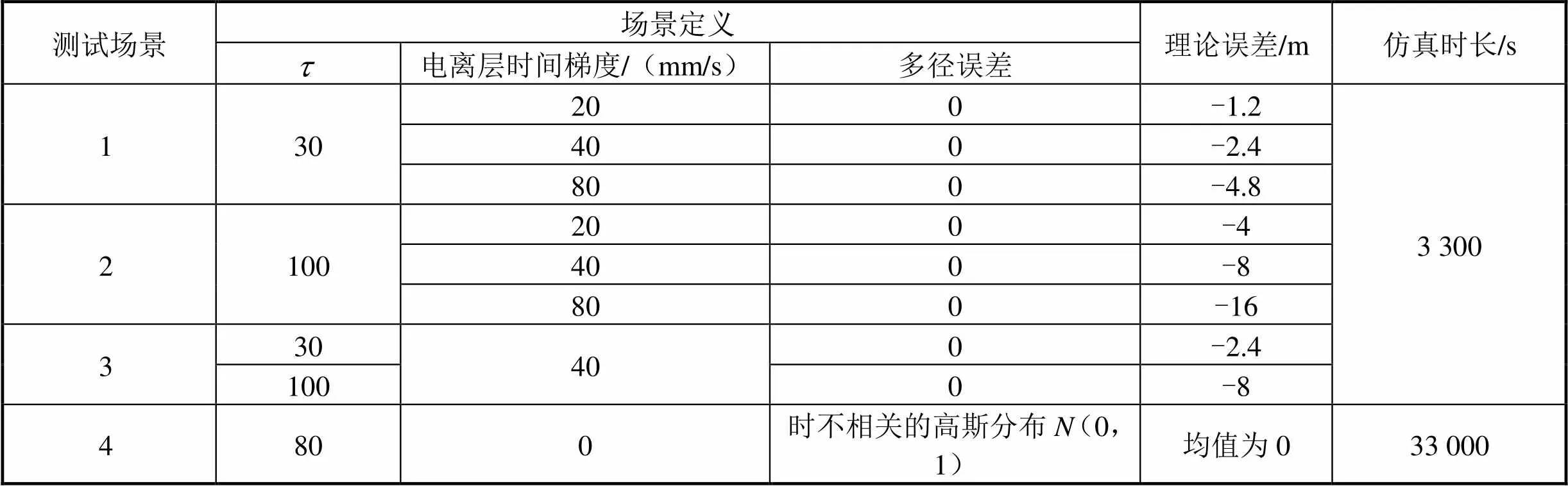
表1 测试场景

表2 软硬件信息
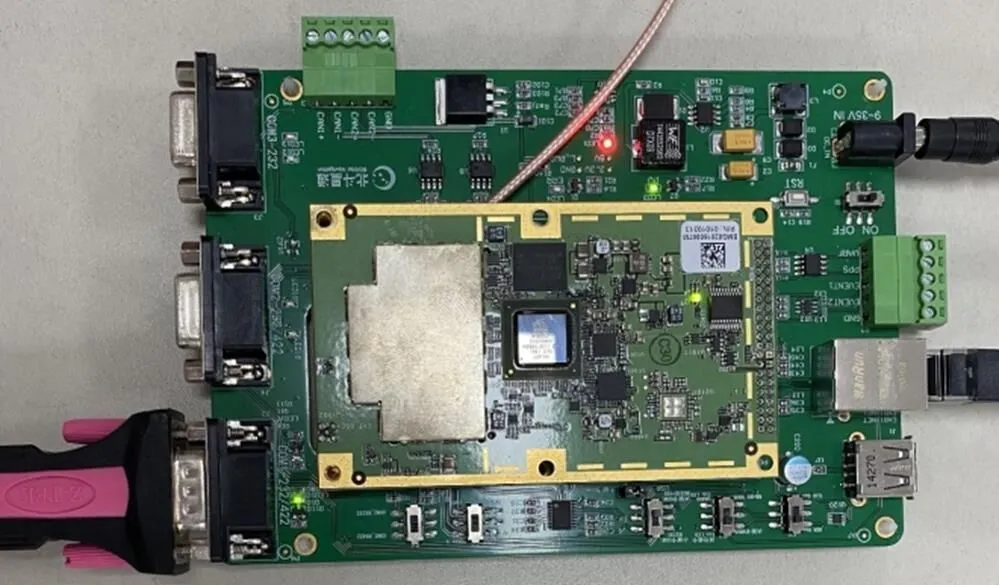
图3 原始观测数据采集板卡

图4 数据解析记录软件
通过设置OEM 729板卡输出未经平滑的原始伪距和载波测量值至数据记录软件解析和存储,数据更新率1 Hz,然后将记录的载波和伪距测量值按照表1中的测试场景参数进行数据后处理,最后对结果进行分析。测试结果如图5~图7所示。
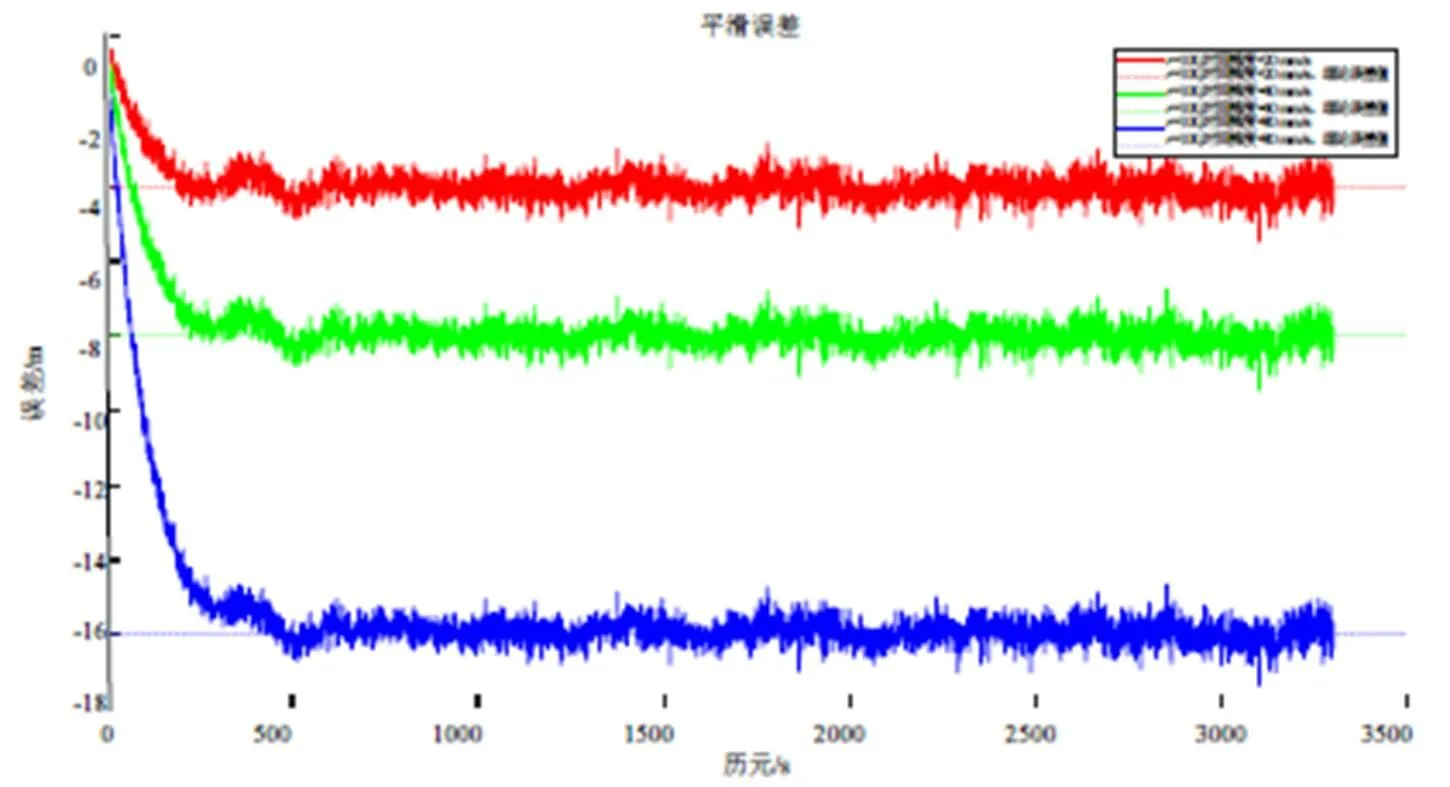
图6 测试场景2仿真结果
为了对比验证逼近稳态误差所消耗的时间,特设置测试场景3,该测试场景参数详见表1,仿真结果如图7所示。
从图7可以看出,在相同电离层时间梯度作用下,滤波时间常数越大,则逼近至理论误差所消耗的时间就越长,稳态误差也越大,与理论结果一致。
为了验证多径信号是时不相关的情况下,对平滑滤波器的影响,特设置场景4进行仿真验证,场景参数请参见表1,仿真结果如图8所示。
从图8可以看出,如果多径是时不相关的高斯白噪声,那么引入的平滑滤波误差均值将是0,与理论分析一致。
3 结论
本文通过对电离层时间梯度和多径效应对载波平滑码伪距滤波器进行误差理论分析和仿真验证,得出如下结论:
1)电离层时间梯度引入的误差与电离层时间梯度和滤波常数有关,且滤波常数越大,其逼近稳态误差所消耗的时间越长;
2)多径引入的误差主要与多径自身特性有关:如果多径效应是长周期项,则平滑滤波器很难对其消除;如果多径效应属于零均值的高斯噪声,则多径引入的滤波器误差也将是零均值。
上述结论可以为电离层时间梯度监测门限值和选择合适滤波常数等场景提供理论基础。
[1] Zhao L, Li L, Sun M, et al. Novel adaptive Hatch filter to mitigate the effects of ionosphere and multipath on LAAS[J]. Journal of Systems Engineering and Electronics, 2010(06): 124-131.
[2] Front Detection for the Local Area Augmentation System Using Carrier Phase Measurements[J]. Proceedings of international technical meeting of the satellite division of the institute of navigation.
[3] RTCA DO-245C. Minimum Operational Performance Standards (MOPS) for LAAS[S]. Washington DC: RTCA, 2002.
[4] Cheng J, Xu J S, Cai L. A comparison of statistical features of Ionospheric scintillation and cycle slips in the mid-south region of China[J]. Chinese Journal of Geophysics, 2018, 61(1).
[5] XIE G. OPTIMAL ON-AIRPORT MONITORING OF THE INTEGRITY OF GPS-BASED LANDING SYSTEMS[D]. Palo Alto: STANFORD UNIVERSITY, 2004.
[6] WALTER T, DATTA-BARUA S, BLANCH J, et al. The Effects of Large Ionospheric Gradients on Single Frequency Airborne Smoothing Filters for WAAS and LAAS[C]. 2004.
[7] 许憧,孙超,赵洪博,等. GNSS信号码相位载波相位不一致性机理及影响分析[C]//第十一届中国卫星导航年会论文集——S07卫星导航增强技术. 2020.
Error Analysis of Ionospheric Gradients and Multipath on Single Frequency Smoothing Filter
ZHANG Ang, YANG Jiaxu, CAO Youquan, LI Bin
The industry mainly uses the technology of carrier smoothing pseudo-range to output smoothed pseudo-range,e.g. Hatch filter, which further reduces the influence of multipath and thermal noise, so as to improve the positioning accuracy. Since the ionosphere has opposite effects on the measured values of the carrier and the pseudo-range, the smoothed pseudo-range will contain the error introduced by the ionospheric delay, which will affect the positioning accuracy and even endanger the safety of life. Therefore, it is important and necessary to study the influence of ionosphere on carrier smooth pseudo-range. By adding the ionospheric time gradient model and multipath model, the output error of smoothing filter is analyzed theoretically, and the above analysis results are simulated and verified, so as to provide the theoretical basis under the scenarios of the ionospheric time gradient monitoring threshold selection, the appropriate filter time constant selection, etc.
Ionosphere Model; Time Gradient; Multipath; Hatch Filter; Error Analysis
TN967
A
1674-7976-(2022)-04-263-06
2022-03-23。
张昂(1988.07—),河南驻马店人,硕士研究生,工程师,主要研究方向为GNSS完好性监测。
猜你喜欢
空间科学学报(2021年4期)2021-08-30 08:31:16
空间科学学报(2021年2期)2021-07-21 08:43:28
测绘科学与工程(2017年3期)2017-08-16 02:46:08
雷达学报(2017年6期)2017-03-26 07:53:02
测绘通报(2016年12期)2017-01-06 03:37:13
西部广播电视(2015年10期)2016-01-18 04:01:45
导航定位学报(2015年2期)2015-06-05 09:27:38
导航定位学报(2015年2期)2015-06-05 09:27:34
电测与仪表(2014年15期)2014-04-04 12:05:32
华东理工大学学报(自然科学版)(2014年2期)2014-02-27 13:48:49
