
基于渔业船联网的船载终端系统设计与实现
2022-09-02 01:53:46张玉涛李国栋汤涛林尹项博杨育红
渔业现代化 2022年4期
张玉涛,李国栋,汤涛林,尹项博,杨育红
(1 中国水产科学研究院渔业机械仪器研究所,上海 200092;2 青岛海洋科学与技术试点国家实验室,山东 青岛 266237)
渔业数据是促进中国渔业高质量发展的重要资源要素,以渔业船联网为基础的渔业大数据建设是渔业科技创新的新方向[1-2]。海洋渔船具有数量多、分布广、持续作业时间长等特点,在海洋数据采集和渔业大数据建设方面具有巨大的潜在优势和前景[3-4]。渔业船联网以海洋渔船为基本网络节点,结合现代网络和通信技术,可实现船-船、船-岸之间的数据传输和信息融合[5-6],不但能够保障渔船作业安全、指导渔业生产,而且能够提供水文、气象、渔业资源分布等大量重要海洋数据,对海洋科学研究、海洋资源开发、海洋权益维护等都具有重要意义[7-8]。欧美等渔业发达国家在渔业船联网的研究和应用方面走在世界前列,部分国家已经开始将渔业船联网获取的数据进行管理和应用,并构建起海洋数据平台为相关行业提供服务[9-12]。我国现有渔船多以小吨位渔船为主,智能化程度较低,渔船配置的传感器差异较大,多处于单机工作状态,无法实现多源异构数据的集中处理,渔船不能作为数据节点参与渔业船联网构建,从而无法建立完善的渔业数据库,严重制约了中国海洋渔业大数据库的建设和渔业现代化发展[13-17]。
本研究根据中国渔船装备现状和作业特点,设计并实现基于渔业船联网的船载终端系统,通过高度集成的主机设计和数据融合、自适应通信等算法设计,实现渔船全海域的渔业数据采集、传输和组网,降低现有渔船智能化改造和组网成本,为渔业船联网的应用和推广以及渔业大数据平台建设打下基础。
1 系统总体设计
渔船作为渔业船联网的基本节点和信息源,依靠船载仪器和设备完成数据的采集和处理,并利用通信和组网技术完成数据的交换[6,18]。结合渔业船联网及渔船助航助渔功能需求,提出了渔业船联网船载终端系统总体设计。作为渔船节点的数据中心和控制中心,船载终端系统主要包括系统主机硬件和系统主机软件2部分。系统主机硬件主要为多源传感器提供电气接口,完成通信协议及电平转换,并为系统软件运行提供平台,根据系统指令实现相应的电路控制、数据传输等功能。系统主机软件主要完成传感器的数据处理,在相应功能区进行数据调用和信息显示,并根据控制策略实现指令收发、数据融合及远程传输控制等功能。系统总体设计框图如图1所示。
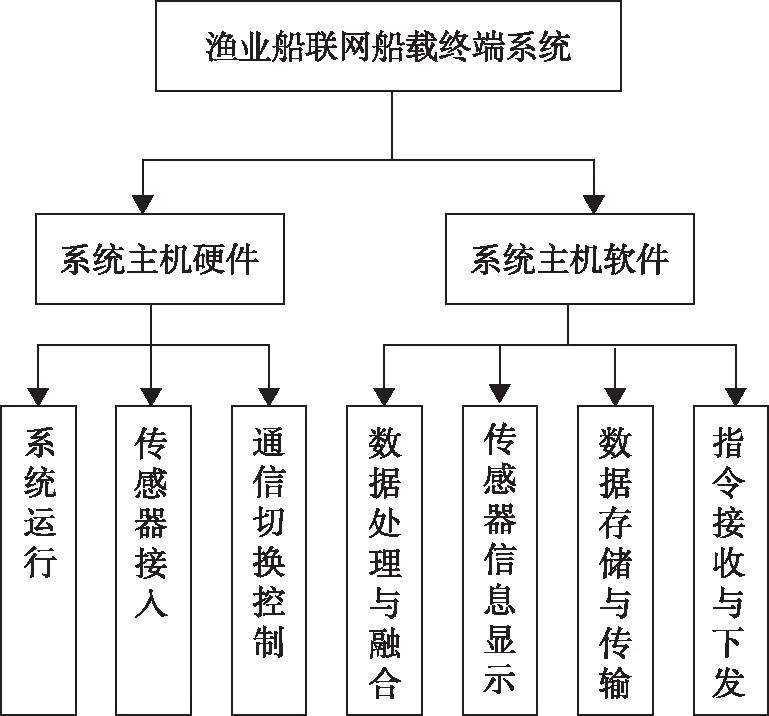
图1 船载终端系统总体设计框图
2 系统硬件设计
2.1 系统主机设计
船载系统主机作为信息处理、控制指令收发、数据显示的核心,主要由主处理器、AIS收发机、设备接口模块、转换控制模块、电源模块等部分组成。主机及内部结构如图2所示,采用双层嵌套式设计,内层结构用于主控机等相关设备和电路板的固定,各功能区域之间设计有散热风道,可实现机箱的温度快速调节。集成系统主机体积小,长宽高仅为502 mm、471 mm、232 mm,降低了对渔船主控室的空间要求。
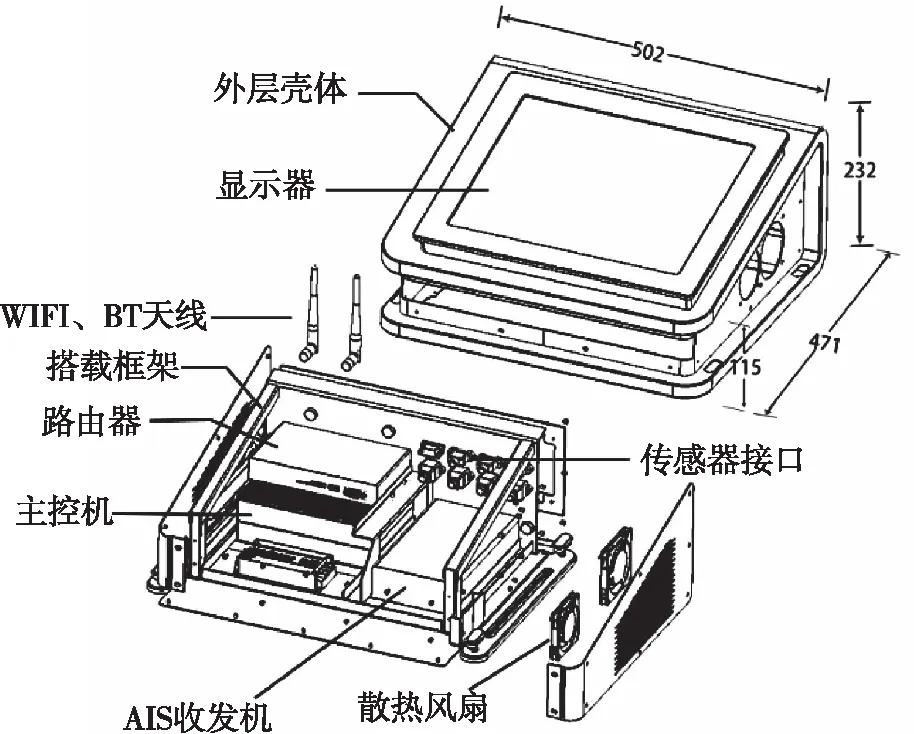
图2 主机结构及整体图
2.2 设备选型及接口设计
系统主处理器选用UNO-2484G型工控机,采用Core i7处理器,支持多种操作系统,主频可达6.4 GHz,采用8 GB的DDR4内存,同时配备了1TB硬盘存储模块,可满足系统软件的运行和数据存储需求;AIS作为渔船常用的通导设备[20],选用ONWA KS_200型AIS收发机来进行船舶识别和参与海上交管。
主机接口主要由RS485串口、网口以及天线专用接口3种类型组成。串口采用RS485通信接口进行传感器的连接,其采用平衡驱动器和差分驱动接收,可减少传输过程中的共模干扰,保证强电磁环境下信号的有效传输,最大无线传输距离为1 200 m[21],能够满足大部分渔船信号传输距离的要求。主机接口共支持8路串口设备、8路网口设备、4路通信天线的接入,同时可根据需求进行接口的拓展,可满足多种类型传感器及通信设备的接入。
3 数据处理与传输
3.1 系统数据处理流程
船载集成系统的核心在于传感器数据的有效采集和处理,即利用主机的中央处理器(CPU)对不同类型传感器的数据进行自动解析、分析处理,从而完成信息的集中最优化处理。针对渔业船联网多源传感器产生的大量异构数据,系统数据处理过程如图3所示。系统通过主机接口采集传感器数据,首先通过信号转换电路完成电平转换,然后CPU判断数据来源完成数据解析,根据节点描述表筛除不完整数据,并剔除数据包中的包头、校验位等字节,提取出有效数据;系统根据传感器之间的相关性进行数据分组,根据设置的采样周期完成各组中传感器数据的计算,使得数据采样率与系统设置采样率一致;然后系统根据数据描述表完成数据的结构化处理,通过数据融合生成融合数据集;最后通过数据总线将融合数据集发送至相应设备,完成数据的存储、显示和远程传输。

图3 传感器数据处理示意图
3.2 多源传感器数据融合
作为船载系统的重要功能,渔船作业区域的环境及作业等特征数据由船载传感器网络监测获得,特征数据包含了文本、图像、数字信号等多源异构数据类型,各特征数据采集速率和实时性要求也各不相同。多源传感器异构数据融合主要过程是对测量数据进行预处理以解决数据的重复、冗余等问题,通过数据级的融合,降低数据量,提高强相关数据的有效性。多源异构数据融合结构如图4所示,根据数据来源进行相关性判定,将传感器数据进行协议解析,剔除数据包头等冗余数据并进行类型转换,完成数据的清洗。
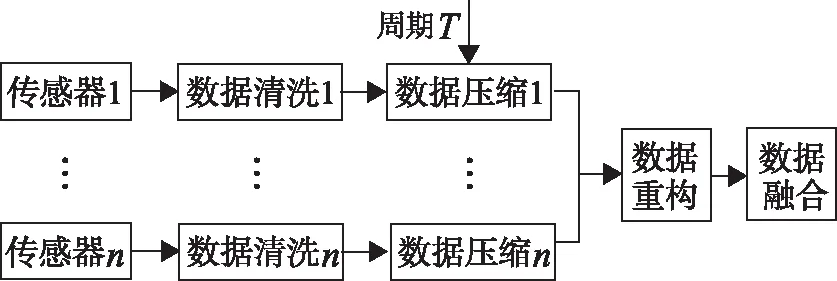
图4 多元数据融合结构框图
系统通过CUP设定统一的采样周期来解决多源传感器采样率不一致问题,假设设定的采样周期为T,若传感器n的数据采集频率为fN,则传感器n上传的数据为:
(1)
系统采用数据级融合方法[22-23],经过处理之后的数据,通过识别数据库表头的方式,进行强相关性多维数据组合,形成融合数据集。系统根据多源传感器之间的相关性会生成多个融合数据集,多个融合数据集之间以时间和船位信息为统一识别基准,共同构建起采样点的全面特征数据。
3.3 自适应通信切换
渔船作业海域范围广,近海作业渔船还会频繁往来于渔港与作业区之间,渔船所处位置不同,网络信号的覆盖情况也不同,因此需要采用不同的方式来实现船-岸之间的远程通信。系统采用自适应通信切换策略,以实现4G通信优先,卫星通信全覆盖的目的。自适应通信切换工作控制流程如图5所示。
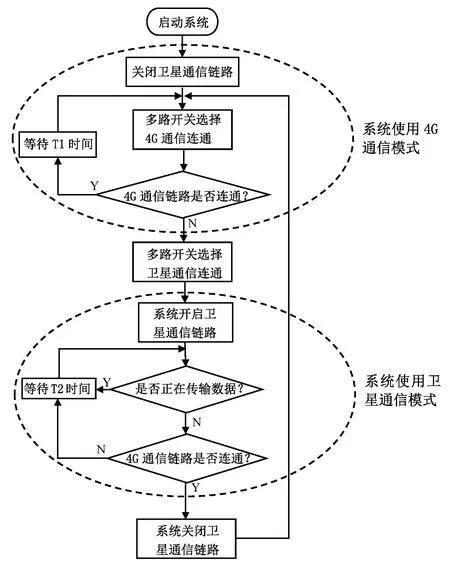
图5 自适应通信切换流程图
主机根据设定的时间周期T1,通过“PING”命令测试4G信号链路质量,当4G链路信号质量较好时,采用4G网络进行数据的远程传输;如果4G网络链路不连通,则通过多路选择器自动切换至卫星通信链路,完成数据的传输。在卫星通信状态下,主机根据设定的时间周期T2进行4G信号的链路测试,如果4G信号链路质量较好,则自动切换至4G通信链路。在此过程中,系统会调用位置数据来初步判断渔船所处区域的网络覆盖情况,通过动态调整T1和T2的时间长度来实现数据的稳定传输。
4 系统软件功能实现
4.1 系统软件架构设计
船载终端作为渔船的数据中心,系统软件主要实现传感器数据的处理、信息的本地显示、数据协议实现与传输等功能。本系统基于.NET Framework开发环境,通过Chromium内核框架进行系统开发。Chromium内核框架具有开源、稳定性高、流畅性好等优点,利用Chromium扩展库,结合HTML、CCS、JavaScript可实现界面框架和各模块控件的快速开发[24]。
系统软件架构如图6所示,传感器系统通过网口和串口将数据连接至主机电气接口;通过调用.NET Framework类库中的API函数实现数据的解析和处理,并将数据传输至Chromium内核的数据更新缓存区;内核读取缓存区的数据,并根据数据来源和执行动作,完成数据的处理,并通过系统图形接口完成信息显示。

图6 系统软件架构
4.2 系统软件功能实现
4.2.1 信息显示模块
信息显示模块是人机交互的主要部分,根据信息的重要程度与查看频次采用多级界面显示方式,可以使得各传感器数据更加清晰和直观,系统主界面如图7所示。主界面以卫星图为基础,完成渔船基本信息、航行信息、周围渔船等基本信息的显示;二级界面以弹出窗口的形式实时显示传感器数据,如探鱼仪信息、视频监控、气象数据等;三级界面主要实现历史数据查询,可根据月、天、周切换进行历史数据变化趋势分析。系统通过.NET中的API接口调用系统设置、AIS等数据,完成卫星图层中基本信息的添加,显示界面主框架采用Chromium内核类库搭建,通过调用类库中函数完成各级窗口的创建和控件动作属性的设置。

图7 系统主界面
4.2.2 数据获取与调用
主机通过串口或网口接收到传感器数据后,首先根据数据来源完成协议解析及融合处理,并根据异构数据的相关性进行分组,通过调用.NET函数将数据上传至内核缓存区。内核根据不同数据类型采取相应的处理策略,摄像头和探鱼仪等视频数据直接进行调用,并在单独窗口显示;环境、渔船动力等文本数据则根据分组,分别提取数据要素,根据属性设置完成传感器数据的分组显示。当查看历史数据时,系统根据相应区域的动作属性,将存储的数据调入数据缓存区并根据时间顺序进行显示。
4.2.3 数据存储与传输
对于获取的传感器数据,系统同时进行原始数据和处理后融合数据集的本地存储。船载系统采用轻量级的MQTT通信协议进行数据远程传输,在通讯过程中,船载集成系统定义为发布者(Publish),岸基数据中心定义为订阅者(Subscribe);传输的消息队列分为主题(Topic)和负载(payload)两部分,在融合数据集的传输中,每条数据添加关键字作为主题,各传感器融合后的数据作为消息队列的负载。作为一种低开销、低带宽的即时通信协议,MQTT协议在带宽受限的渔业船联网应用场景中具有较好的传输性能,可有效降低信息传输成本[25]。
5 系统部署及试验
5.1 船载系统部署设计
5.1.1 船载试验整体部署
船载系统基于中国某型远洋渔业船舶进行部署实验,船长66.66 m,船宽12.4 m,续航力为8 000 n mile,可满足系统在不同应用场景下的组网测试。为充分验证系统对渔业船联网常用传感器的集成处理能力,根据渔船特点主要部署了3类传感器:渔船助航传感器、渔船环境监测传感器、助渔仪器。同时,部署了4种不同的通信设备,可完成不同规模的组网功能。终端系统主机放置于驾驶室之内,船载系统整体部署如图8所示。

图8 船载系统部署图
5.1.2 传感器选型
完善的船载传感器节点是实现渔业船联网多样化应用的基础,根据渔业船联网渔船节点数据需求,进行了传感器的选型,如表1所示。所选传感器可完成环境、助航、助渔等多种特征数据的采集,数据包括视频、文本等多种类型,可充分验证终端系统的数据集中处理能力。
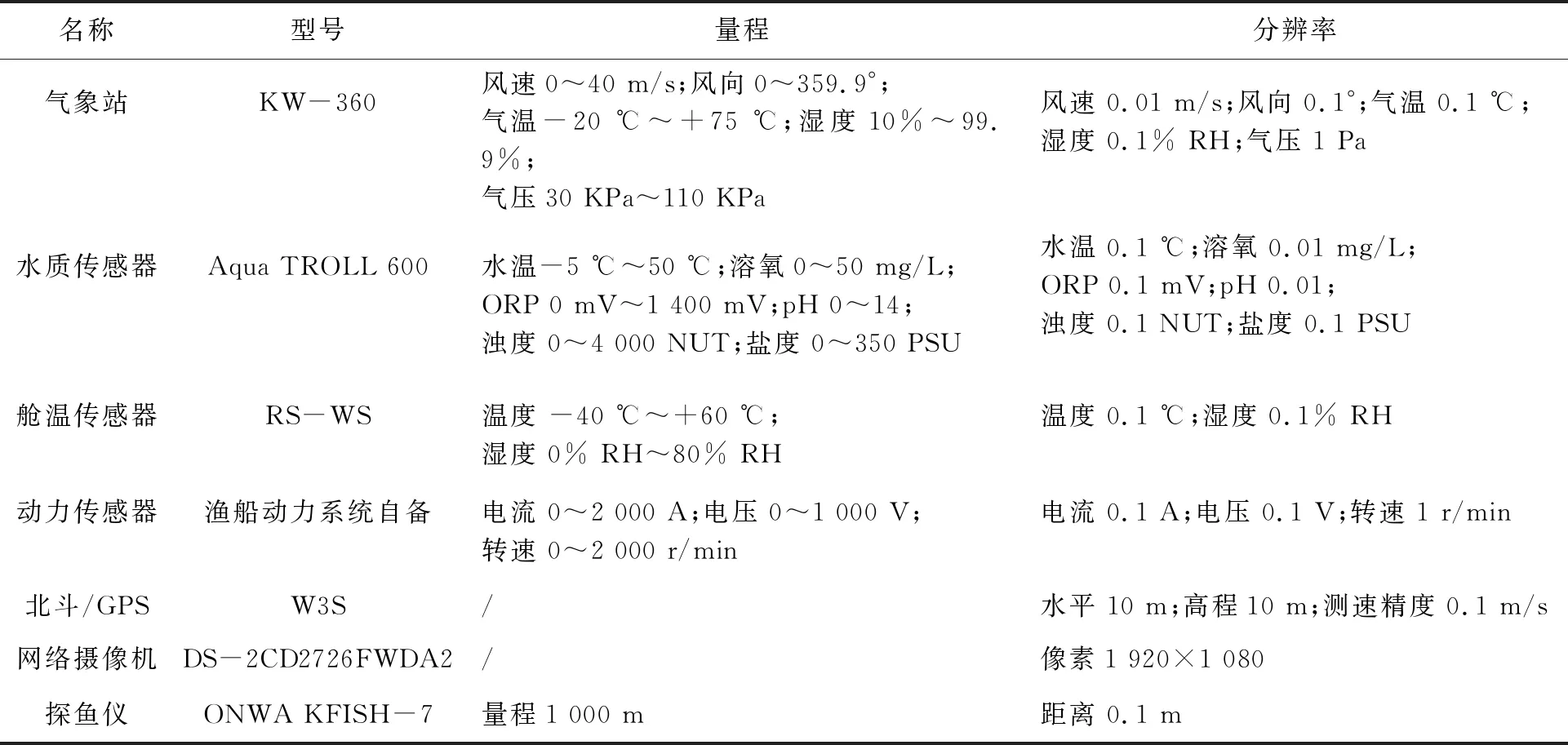
表1 传感器选型
5.1.3 船载通信设计
在渔业船联网应用场景中,实时通信需求多为小数据量、高稳定性的场景[6,26]。针对渔船不同的作业场景的通信需求,结合渔船通信设备的情况,共部署了4类渔船终端通信方式[27-30],如表2所示,可支持验证船载终端系统自适应通信切换控制的有效性测试。

表2 船载系统通信方式
5.2 结果与分析
5.2.1 试验结果
测试航行海域主要为中国南海海域,测试连续进行30余天。终端系统通过对传感器网络节点的集中采集和处理,完成数据的清洗和压缩融合,共生成5类融合数据集,包括环境数据集、水质数据集、船舶系统数据集、助航数据集、助渔数据集,采集的原始数据达206余万条。通过数据清洗及融合处理后,数据量压缩至46万余条,仅占原数据量的22%,在保留有效数据的前提下,大大降低了数据的传输量。以环境特征融合数据集为例,表3为部分数据,融合了从AIS获得的船舶识别号、从北斗获取的位置信息、系统时间、传感器数据等强相关信息,全面直观地体现了采样点的各项特征数据。
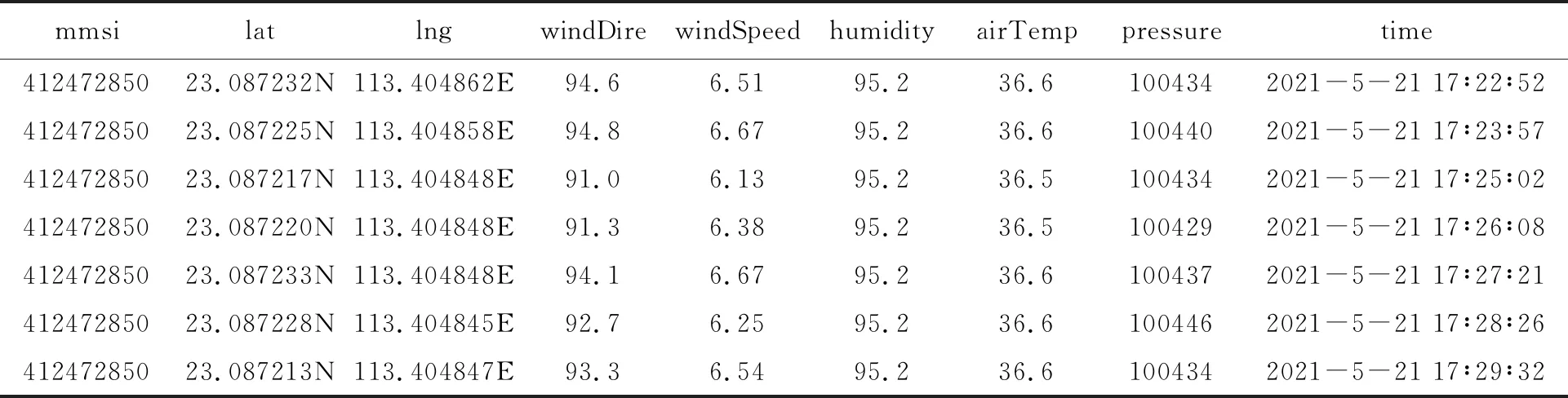
表3 环境特征融合数据集
岸基数据中心监测如图9所示。
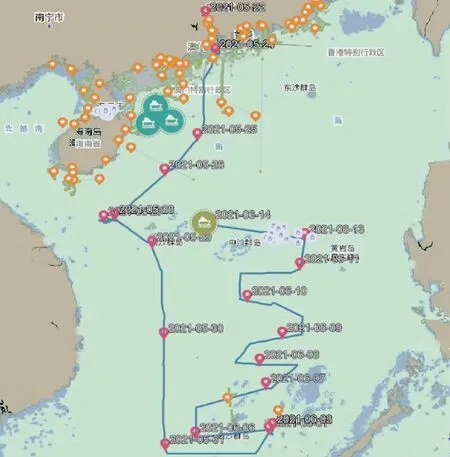
图9 岸基数据中心监测图
可以看出整个航程中数据中心均连续获得了船载集成系统的远程实时数据。测试航行范围覆盖了近海和远海海域,系统根据不同海域的信号覆盖情况,通过自适应切换方式分别通过4G和卫星通信方式,将融合数据集实时远程传输至渔业船联网岸基数据中心。船联网岸基数据中心通过对各类融合数据集的解析,实现了对测试船舶的实时动态监测。
5.2.2 分析讨论
经实际航行测试,基于渔业船联网的船载集成系统不仅能够完成多源传感器异构数据的采集与实时显示,还通过数据清洗和融合设计生成融合数据集,实现对原始数据的压缩,压缩率可达78%,大大提高了传输效率。利用自适应通信切换,综合利用不同通信方式优点,实现了近海和远海不同信号覆盖海域的不间断实时通信,实现了数据中心对渔船全航程数据的实时远程监测。试验表明,船载集成系统性能稳定、功能完备,可满足渔业船联网不同应用场景的需求。但本系统还存在不足之处,如摄像头和探鱼仪等视频数据量多,占用通信带宽大等,后续系统将通过图像识别算法进行关键信息提取的方法解决上述问题。
6 结论
针对中国海洋渔船现状,为实现渔船的智能化升级改造,构建渔业船联网,设计了一套基于渔业船联网的船载终端系统。系统包括硬件主机和系统软件2部分,硬件主机体积小、性能高,集成了多种类型的电气接口,可满足多源传感器的集中接入和处理,实现了信息的本地集中处理和显示。系统软件通过多级界面设计,实现了传感器数据的实时显示和历史查询。通过数据级融合算法生成融合数据集,实现了数据的高效压缩和传输,并通过自适应通信切换控制,在降低传输成本的同时实现了全海域的实时传输。通过部署测试,完成了航行海域多源传感器异构数据的采集和处理,并通过不同的组网方式实现了数据的实时远程传输。本研究设计的渔业船联网船载终端系统集成度高、稳定性好、功能全面,可为我国渔船智能化改造和渔业船联网建设提供支撑。
□
猜你喜欢
作文小学高年级(2023年5期)2023-09-06 19:57:41
党的生活(黑龙江)(2022年4期)2022-04-25 22:14:17
廉政瞭望(2021年15期)2021-08-23 04:55:22
世界农药(2019年4期)2019-12-30 06:25:06
商周刊(2018年19期)2018-12-06 09:49:41
通信世界(2018年27期)2018-10-16 09:02:56
中国水产(2017年2期)2017-02-25 07:56:08
小学科学(学生版)(2016年5期)2016-12-05 11:02:11
湖南畜牧兽医(2016年3期)2016-06-05 08:37:56
风能(2015年10期)2015-02-27 10:15:34
