
触觉传感器与电子皮肤研究进展*
2022-09-01 08:56朱盛鼎陈冬冬雷静桃
电子机械工程 2022年4期
朱盛鼎,陈冬冬,雷静桃
(上海大学机电工程与自动化学院,上海 200444)
引 言
机构设计、传感、控制、人工智能和人机交互技术是支撑机器人技术的5项关键技术。其中传感技术是机器人感知环境的基础[1–2],它与控制技术和人机交互技术密切相关,因此机器人传感技术是机器人技术中的重中之重。在传感技术中,视觉传感器是机器人最重要的传感器,但力和触觉感知也是机器人仅次于视觉的重要信息来源。从广义上讲,触觉是指压觉、滑动、冷热、接触等机械刺激的总称。从狭义上讲,它是指四肢与物体接触面上的力感[3–4]。触觉传感器的功能是模仿生物的触觉感受,当它与物体接触时,可以检测被检测物体的一些物理性质,如温度、形状、纹理、材质等,并将检测到的物理性质进行反馈,以便机器人进行下一步操作。动物与人类每平方米皮肤上有成百上千个机械感受器来获取触觉信息,为了模拟这些机械感受器的功能,世界各国投入了大量人力、物力对触觉传感器进行研究。
机器人触觉传感器的研究始于20世纪70年代,随着机器人技术的发展而发展[5]。科研人员对传感器的结构设计、传导机制等进行了大量研究。有基于电阻式、电容式、压电式、热释电式、电磁式、磁电式、力敏式、光电式、超声波、光纤等的触觉测量方法。基于传感器结构创新与传感器融合技术,扩充了触觉传感器可以采集到的信息,将功能由原来只能采集法向力扩充为既可采集法向力又可采集切向力、温度等。2000年以来,随着新兴材料的出现以及传感器制备工艺的发展,触觉传感器开始向柔性化、生物相容性、高灵敏度等方向发展。电子皮肤成为研究热点,它既融合了传统触觉传感器感受外界机械刺激的能力,又具备与生物皮肤相似的柔性和可延展性,有的电子皮肤还具备自愈合、自清洁等功能。本文主要概述不同传感机理的触觉传感器以及电子皮肤的研究进展。
1 机器人触觉感知
机器人的触觉传感系统通过接触来测量物体的物理特征,从而实现对周围环境的感知。机器人触觉感知有许多应用场景:机器人在抓取物体时,可通过触觉感知来控制抓取的力度大小,不会因为抓力过小使物体滑落,也不会因为抓力过大导致物体损坏;机器人还能根据触觉信息,通过深度学习等识别算法来识别接触物体的材质及种类等。
文献[6]给出了一个机器人的感知–控制–执行架构系统,如图1所示。图1(a)为触觉感知过程,被划分为功能块,传感过程、感知和控制动作描述处于不同的层次。图1(b)为这些功能块对应的硬件结构块。传感过程将外部刺激(如压力、振动和热刺激)转化为触觉传感器传感元件的变化。使用嵌入式数据处理单元收集、调整和处理这些数据,然后将其传输到更高的感知层。感知层的任务是构建一个模型,用于感知交互对象的形状和材料属性等特性。在感知阶段,触觉还可能与视觉、听觉等其他感知方式融合。最后,在执行层,机器人根据融合数据执行控制命令,并使用控制器完成动作。

图1 机器人触觉传感系统的层次功能和结构框图
2 触觉传感器分类
触觉传感器从原理上可分为压阻式、电容式、压电式、电感式和光学式,最常用的是压阻式、电容式、压电式,比较新颖的是光学式。
2.1 压阻式触觉传感器
压阻式触觉传感器是利用压阻效应制备的传感器。压阻效应是指压阻材料受到应力时,其内部电阻率发生变化,采集电路通过将电阻的变化转化为便于测量的电信号来检测传感器的受力大小。
2016年,意大利比萨大学的M. Bianchi等人提出了一种包括四层织物的压阻柔性触觉传感器[7]。如图2所示,通过织物层增加了触觉传感的柔性,并利用其间隔层独特的蜂巢结构使传感器不受法向力时与采集电路断开连接,以减小传感器的能量损耗和发热量。2019年美国麻省理工大学的S. Sundaram等人利用数条导线与力敏薄膜层制成三明治结构的柔性触觉传感器[8],直接用上下两层导线的重叠部分作为电极层以增加传感单元,并将传感器集成在手套上采集触觉信息。这种传感器测量范围广,鲁棒性高,但其导线所占空间大,会在一定程度上干扰手部动作。

图2 压阻柔性触觉传感器结构及实物图
压阻式触觉传感器普遍具有负载能力强、鲁棒性好、电信号测量便捷等优点,然而其迟滞性较大,不利于快速响应,并且其温漂大,线性度也较差。
2.2 电容式触觉传感器
当电容式触觉传感器受到法向力时,其上下电极板的间距发生改变,导致传感器的电容值发生变化;当传感器受到切向力时,上下电极的重合面积发生变化,也会导致传感器的电容值发生变化。因此电容式传感器便于测量三维力的大小。
英、美、日等国家对电容式触觉传感器进行了深入研究。2009年,美国明尼苏达大学的H. K. Lee等研制了一种可空间拓展的柔性电容触觉传感器。该传感器柔性好,空间分辨率高,但其量程较小。H.K.Lee等对传感器结构进行了改进,将原先传感器的4个触感单元合成1个触觉单元,并用圆柱体结构将传感单元隔开,这种设计可以满足传感器在测量法向力的同时也可测量切向力[9–11]。2015年,德国的E. Cagatay等改进了电容式触觉传感器的电极,用喷镀碳纳米管作为传感器电极,并改进了电介质材料,可满足对微小压力的测量[12]。2017年,B. G. Zhou等用3D打印技术与聚二甲基硅氧烷(PDMS)材料制作出传感器的弹性介电层,其团队研制的电容性触觉传感器具有较高灵敏度,可实时监测人体微弱生理信号[13]。2020年,葡萄牙阿祖雷姆米尼奥大学的E. Sotgiu等提出了一种具有亚毫米空间分辨率的基于聚酰亚胺材料的电容式触觉传感器阵列[14]。聚酰亚胺材料被可压缩PDMS层覆盖,以调整正常压力灵敏度和动态范围,传感器可检测小金属螺母的特征。2021年,Y. L. Liu等提出了一种可测量三维力的新型柔性电容式触觉传感器[15],如图3所示。该传感器使用交叉杆PDMS壁和圆柱阵列作为复合结构介电层,每个传感单元由一个2×2电容器阵列组成,其中电极对以交叉条图案排列,并在传感器上引入了顶部凸块,以确保力均匀地施加在传感器上。对传感器施加力时,它会改变4个电容器的电容,从而区分不同方向的力。电容式触觉传感器的灵敏度与空间分辨率高,响应幅度宽,但其测量电路复杂,传感器易受电气干扰的影响。

图3 电容传感器结构图
2.3 压电式触觉传感器
压电式触觉传感器是一种基于压电效应的传感器。压电效应指当晶体受到法向力时,内部产生电极化现象,撤掉外力时,晶体又恢复到不带电状态。将压电式触觉传感器连接到电荷放大器和测量电路上,采集其与所受外力相关的电信号,从而实现触觉检测。
2012年,意大利理工学院的L. Seminara等将聚偏二氟乙烯(PVDF)薄膜集成在柔性印制电路板表面,制成阵列式压电式触觉传感器,12个触觉传感单元为一组构成正三角形的传感器,便于贴附在手指上,如图4所示[16]。该传感器柔性好,测量范围广,但其稳定性较差。2016年,俞平等提出一种可测量三维力的压电式触觉传感器[17],如图5所示。4个小正方形上电极、PVDF层和一个大正方形下电极构成三明治结构的传感器,并在上电极层上集成凸点。当凸点受到法向力或切向力时,4个压电容器的电荷产生变化,通过测量电荷量的变化得到传感器所受的法向力及切向力大小。2019年,韩国科学技术研究院智能与交互机器人中心的S. Kim等提出一种可应用于机器人手的灵活紧凑的压电式触摸传感器阵列[18]。该传感器由激光切割PVDF 制成,配备该传感器的机械手可实时监测接触物体。
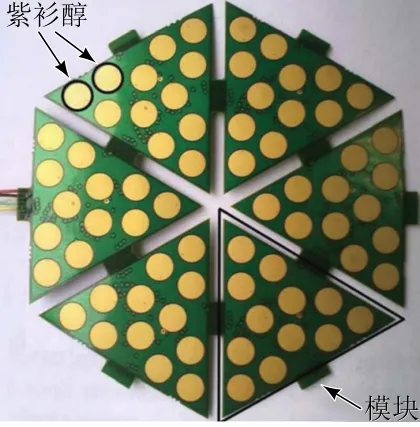
图4 压电式触觉传感阵列

图5 可测量三维力的压电式触觉传感器
压电式触觉传感器是一种自发电和机电转换传感器,不需要外部电源,因此这种传感器更便于携带,且其材料刚度高,线性度好,响应灵敏,但它易受噪声干扰,其介电性会受温度影响。
2.4 光学式触觉传感器
光学式触觉传感器将传感器所受压力映射为光信号强度、波长等性质的变化,通过检测光学信号来检测传感器所受压力。光学式触觉传感器所依赖的传感原理包括光强调制、光纤布拉格光栅(Fiber Bragg Grating,FBG)技术和干涉测量检测,前两种传感原理已得到广泛应用。
基于光强调制原理的触觉传感器通过检测光纤中的光强或光功率的变化来检测触觉力的大小及位置。2012年,加拿大蒙特利尔康考迪亚大学的R. Ahmadi等提出了一种光束型光学式触觉传感器[19],可用于微创机器人手术。该触觉传感器通过测量每根光纤中的功率损耗来测量接触力的值与位置,但其尺寸较大,所需要的光功率也较大。2012年,伦敦国王学院的H. Xie等提出了一种阵列式光学式触觉传感器[20],可测量镜子的法向压力,如图6所示。当某传感元件受到法向压力时,接收光纤中的光强度增加,相机接收到的光信号像素也随之增加,以此来检测镜子受到的法向压力,但此种传感器轻薄性较差。

图6 阵列式光学式触觉传感器
基于FBG技术的光学式触觉传感器受力时会使光栅的间隔和折射率发生变化,导致输出光的布拉格波长偏移,通过检测波长的偏移来检测传感器的受力大小。由于不需要检测光强信号,因此FBG触觉传感器不存在强度波动的问题,并且可以在一根光纤中插入多根光栅来增加传感单元。2012年,德国卡尔斯鲁厄理工学院的C. Ledermann等提出了一种基于FBG技术的光学式触觉传感器[21]。该传感器能够通过分析反射光谱来测量高浓度溶液中的外部应变,如图7所示。2015年,上东大学的J. Song等研制了一种植入在柔性硅中的布拉格光栅触觉传感器阵列[22]。这种阵列具有良好的动态响应能力,但尺寸需进一步减小。

图7 在拉伸或压缩下反射光的FBG光谱
光学式触觉传感器的分辨率高,无电气干扰的问题,但容易受到温度影响,且光纤的微弯曲会导致光损失,分析触觉信息的计算方法复杂。
3 电子皮肤
随着新材料、新工艺的发展,研究人员不再满足于利用触觉传感器采集力信息,也对模拟生物皮肤复杂属性与功能(如皮肤自身的高柔性、自愈合、自清洁等属性以及皮肤对温度、湿度、硬度、粘度的感知能力[23–27])产生了极大兴趣,于是进一步对触觉传感器展开了仿生研究,即开展对电子皮肤的研究。
2005年,日本东京大学的T. Someya等对触觉传感器的功能进行了扩充,将压力传感器阵列与温度传感器阵列进行叠加,实现了对接触表面法向力与温度的同时测量[28]。2011年,黄英等设计了具有一定柔性的四电极对称结构的三维力传感器与插指结构的温度传感器,并将两者凹凸交替排布,实现了三维力与温度的同时测量[29]。2014年,韩国的J. Park等利用碳纳米管和PDMS材料仿制生物皮肤表皮层与真皮层的互锁结构,将两者互相连锁形成拱形结构,制备出了阵列电子皮肤[30–31],如图8所示。这种电子皮肤灵敏度高,可感知细微压力,包括空气的流动方向及剧烈程度等,进一步接近了生物皮肤的功能。2019年,Z. H.Wang等提出了一种可同时测量压力与温度的双峰电子皮肤阵列[32],将均匀的导电涂层与交错的纳米纤维结构集成在一起,不仅赋予了多模传感器优异的柔韧性,而且提供了丰富的接触点和接触面积,可显著提高传感器的灵敏度和工作范围。2020年,M. M. Zhu等设计了一种基于同轴压电纤维的电子皮肤。该电子皮肤具有较好的鲁棒性,以自供电方式模拟人体体感系统[33]。同轴结构使得它在提高形状适应性的同时保持高灵敏度,在80∼230 kPa的压力范围内,灵敏度最高可达(10.89±0.5)mV/kPa。
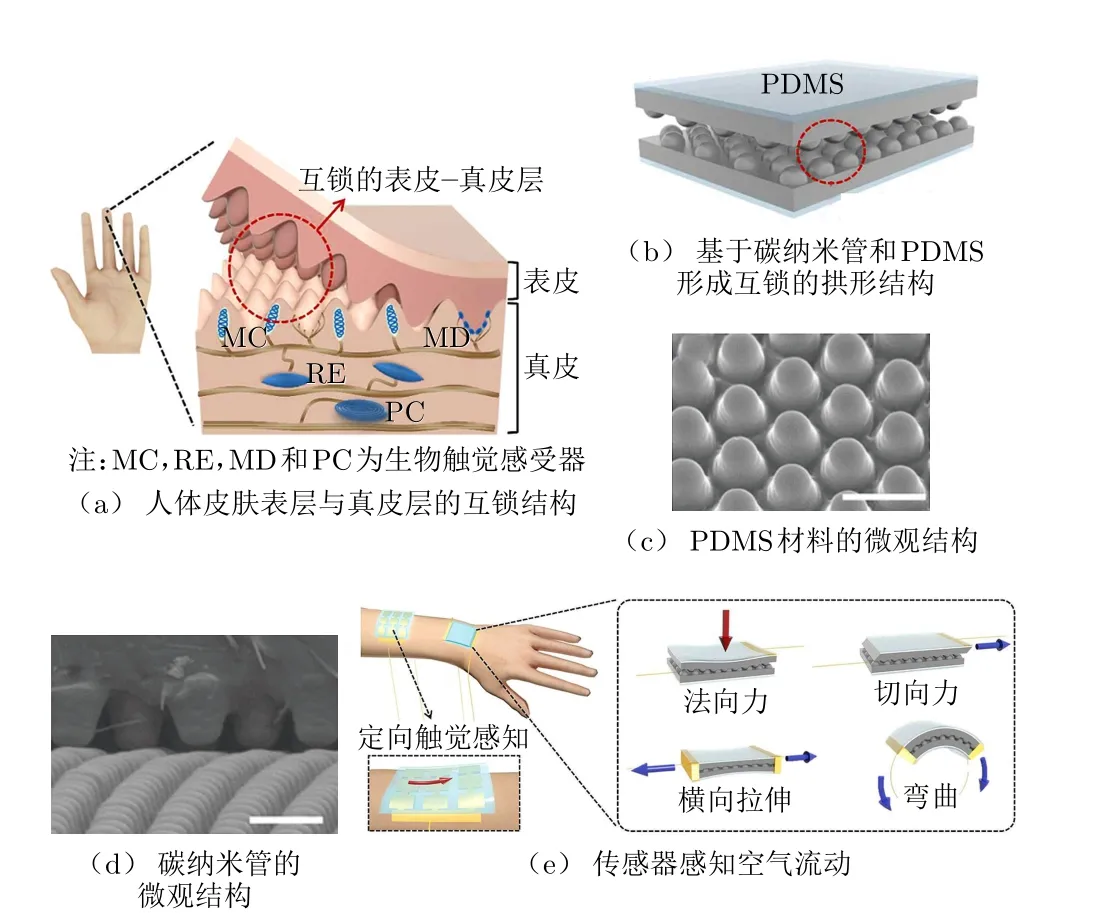
图8 阵列电子皮肤
生物皮肤具备自愈合功能,将具有同样功能的电子皮肤应用在机器人上可延长传感器寿命,降低传感器维修与更换成本。电子皮肤的自愈合功能既可通过传感器材质的自身特性(如材料之间的分子力)实现,也可通过修复剂等外部手段实现。2015年,哈佛大学的J. Cui等通过将修复液储存在作为电子皮肤基材的凝胶基质(由动态聚合物组成)中实现皮肤的自修复功能[34],且修复液会根据电子皮肤材料的损坏程度进行自我调节。2017年,T. Wang等基于聚苯胺(PANI)、聚丙烯酸和植酸合成三元聚合物作为电子皮肤的基材[35],能够通过动态氢键与静电的相互作用,在24 h内恢复电子皮肤99%的电气及机械性能。2021年,四川大学的S. Y. Yin等人制备了一种用作电子皮肤材料的聚丙烯酸(HAPAA)水凝胶[36]。这种材料不仅具有优异的可拉伸性(拉伸率达6 000%)及自愈合能力(自修复效率达100%),还具有粘合性和透明性,适合作为电子皮肤的材料。
目前,电子皮肤的自修复功能已经实现,只是具有自修复功能的电子皮肤的稳定性及灵敏度还有待提高,而且其结构制作工艺复杂,成本较高。
4 结束语
触觉传感器在工业、智能医疗、教学和虚拟现实(Virtual Reality, VR)等领域具有广阔的应用前景[37–39]。触觉传感器可逐渐模拟生物皮肤的复杂属性与功能,如模拟皮肤的柔性、自愈合能力以及对细微力、温度、湿度、物体表面纹理等的感知能力。对传统触觉传感器的研究正逐渐转变为对电子皮肤的研究。
电子皮肤触觉传感器对真实生物皮肤特性及功能的模拟离真实的生物皮肤特性及功能还具有较大差距,主要表现在:1)电子皮肤传感器往往难以兼顾高柔性和高弹性;2)实现多功能需要多种传感技术的融合,因而影响到电子皮肤传感器的轻薄性;3)电子皮肤传感器需要接入采集电路,复杂的接线会影响活动。因此,触觉传感器及电子皮肤大多还停留在实验室阶段。
目前大部分触觉传感器已具有一定的柔性,其保护层柔性好,但其敏感材料的柔性还有待提升。在高强度拉伸或弯曲的情况下,传感器敏感材料容易断裂,造成传感器失效。触觉传感器的供电装置及采集电路复杂的接线会影响机器人动作,未来有望利用太阳、超级电容、动能转化装置等技术实现传感器的自供电,提高触觉传感的灵巧性。虽然触觉传感器及电子皮肤已多功能化(如可测量接触表面的法向力与三维力,还可测量温度等),但尚不具有生物皮肤的湿度、疼痛等感知功能。因此,电子皮肤触觉传感器的全柔性化、自供电和多功能化是未来的发展方向。
猜你喜欢
湖南工业职业技术学院学报(2022年3期)2022-12-06
传感技术学报(2022年7期)2022-10-19
今日农业(2022年15期)2022-09-20
计算技术与自动化(2022年1期)2022-04-15
东北大学学报(社会科学版)(2022年1期)2022-02-17
海外星云(2021年6期)2021-10-14
电子制作(2019年10期)2019-06-17
电子制作(2018年23期)2018-12-26
分析化学(2017年12期)2017-12-25
红豆(2017年4期)2017-04-13
