
电磁发射超高速制导弹药急速滚转稳定性仿真研究
2022-09-01 08:13:50逯麒陈坤栗保明
火炮发射与控制学报 2022年4期
逯麒,陈坤,栗保明
(南京理工大学瞬态物理国家重点实验室,江苏 南京 210094)
电磁发射超高速制导弹药是一种采用电磁轨道炮发射的高初速、远射程、高精度新概念武器[1]。随着抗高过载和强电磁防护技术的逐步成熟,电磁发射超高速弹药实现了从无控弹药向制导弹药的过渡,在远程精确打击、防空反导、反装甲等领域应用潜力巨大,得到世界各国极大关注和重点研究。
不同于常规低速制导弹药,电磁发射超高速制导弹药炮口初速大、动压高、炮口扰动剧烈,如果采用发射后即通过电动舵机的主动控制方法,维持飞行稳定所需控制力矩远远超出了舵机的铰链力矩承受极限;超高速弹药也不同于导弹,导弹发射阶段速度低,加速度有限,控制技术成熟。超高速弹药出炮口后的高速大动压,带来的快时变、强耦合、非线性等问题,需要采用新颖的控制方式。
电磁发射超高速制导弹药可通过斜置尾翼的方式主动起旋,利用旋转稳定性来消除质量偏心和气动力不对称等影响因素对飞行稳定性和打击精度的影响[2]。然而高速旋转运动的耦合作用会增加控制难度,因此需要在合适时机将弹体滚转速度降低至无旋状态。解旋时机一般取决于动压条件是否满足舵机铰链力矩要求。当弹体速度下降,动压达到伺服舵机的起控要求之后,弹载控制系统进行滚转通道的减旋止摆,然后采用三通道控制方式完成对目标的精确打击。
关于电磁发射超高速弹药的相关研究是伴随着电磁发射技术进行的,目前研究均未对电磁发射超高速弹丸出炮口后的滚转运动以及减旋止摆方法进行展开。李湘平、谢杨柳等针对电磁发射一体化弹丸外弹道运动进行仿真研究[3-4],主要考虑初始扰动和气动烧蚀等因素对于弹道特性的影响,但是并未考虑弹体的滚转运动稳定性。针对传统弹箭的滚转运动,国外研究者如Bolz很早就得出了适用于无控旋转弹的稳定性边界条件,指出对于静稳定弹存在一个稳定转速上限[5];Murphy则创造性提出非旋转弹体坐标系,并建立了一套完整的旋转弹动稳定理论[6-7];Nicolaides考虑了周期性扰动对弹体转速的干扰[8],进而引出共振转速会引发弹体共振不稳定;我国学者同样得到了类似旋转稳定性理论,并运用到相关领域[9-11]。除此以外,针对旋转弹箭进行的气动特性分析也得到了广泛研究[12-13],得出了具有参考意义的结论。针对减旋止摆控制方法,国外学者Close和Frank等针对炮射弹药滚转通道,设计了PID控制方法[14-15],给本文提供了一定参考价值,但适用条件显然区别于电磁发射超高速弹药,也并未考虑动压的限制。
综上所述,电磁发射超高速制导弹药在出炮口高动压情况下,为了维持飞行弹道稳定性,需要经历主动起旋、高速滚转、减旋止摆等一系列过渡过程。针对电磁发射超高速制导弹药初始弹道的滚转运动过程,笔者采用理论分析和建模仿真相结合的研究方法,着重于分析弹体飞行动态稳定性以及减旋止摆主动控制策略,给出了适用于超高速弹药的滚转稳定区域判别方法,能够为同类的超高速弹药的急滚稳定性研究提供参考。
1 滚转运动建模
1.1 气动布局
电磁发射超高速制导弹药采用轴对称翼身组合体气动布局,锥形头部和4片全动尾翼的组合能够最大程度满足超高速发射的增程减阻的要求。
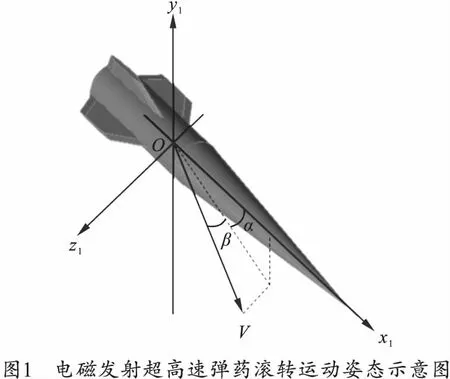
为了清楚地描述和分析电磁发射超高速制导弹药初始弹道的滚转运动情况,建立如图1所示准弹体坐标系Ox1y1z1,弹体速度矢量V与铅垂面Ox1y1的相对位置定义为攻角α和侧滑角β。
由于弹体的旋转运动所需力和力矩主要来自于滚转舵偏角δx,不同的控制需求下的滚转舵偏角需要进行特别设计。滚转舵偏角和舵极性定义如图2所示,其中4片舵片呈“×”型均匀分布,并有相同预置舵偏角δ1=δ2=δ3=δ4,弹体滚转角φ=0,设为初始滚转状态。

1.2 运动方程组
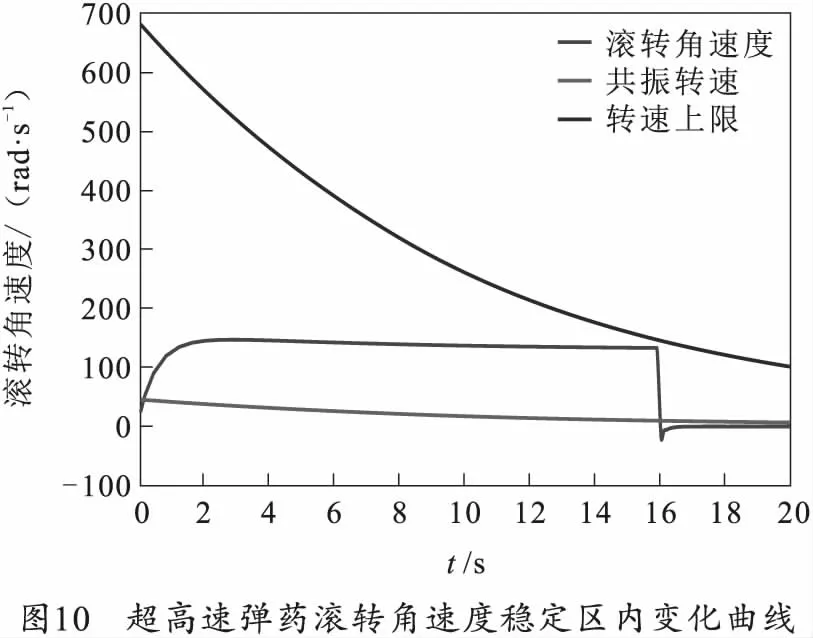
电磁发射超高速制导弹药在外弹道飞行过程中属于非线性时变系统,其滚转通道所受力和力矩随时间变化,受飞行姿态和飞行环境的影响。笔者根据弹体的气动外形和实际飞行情况,对文献[16]提出的低速滚转导弹运动方程组进行适当简化。假设:轴对称弹体的气动参数与滚转方位角无关,其俯仰和偏航通道动力学特性一致且绕轴转动惯量满足Jx (1) 式中:Y和Z分别为弹体所受法向力和侧向力;Mx、My和Mz分别为弹体所受总气动力矩在弹体坐标系各轴上的分量,对于滚转飞行的超高速弹药而言,总气动力矩包括滚转阻尼力矩、导转力矩、马格努斯力矩和交叉力矩。 电磁发射超高速制导弹药在出炮口后的小段时间内,外部扰动作用于弹体的时间较短,弹体锥形运动不明显,可以认为弹体飞行速度矢量方向和旋转角速度矢量与弹体坐标系Ox1轴重合。电磁发射超高速制导弹药的起旋过程,只需选取方程组(1)的第3式即可描述,暂不考虑交叉力矩的影响: (2) (3) 式(3)表明,平衡转速主要与当前时刻飞行速度V成比例。假设式(2)是常系数方程,对其进行求解,则一阶非齐次微分方程的通解表示为 (4) 式(4)表明,超高速弹药从无旋状态到达平衡转速的快慢,主要取决于表达式中滚转阻尼系数导数与飞行速度的乘积。 选择合理的膛外转速,不但能减少对该弹散布起主要作用的起始扰动的影响,还能防止由于转速过快产生马格努斯力矩的影响[9]。针对笔者研究的电磁发射超高速制导弹药而言,无控段弹体有利于转速的确定主要考虑以下条件: 1)起旋时间尽量要短,使得弹体尽快进入平衡转速状态,减小炮口扰动的持续影响; 2)炮口高动态大动压环境下,预置舵偏的合理设计需要考虑舵机铰链力矩的承受极限; 3)在转速变化过程中,应该尽量避免停留在“共振转速”区; 4)弹体转速不宜过大,否则过大马格努斯力矩会对飞行稳定性产生干扰。 根据电磁发射超高速弹药单自由度滚转的特点,弹体滚转角速度和飞行速度在经历快速起旋过程之后,变化趋势逐渐平缓,可认为滚转角速度保持很大的常数ωx0。结合小扰动假设,对方程组(1)中剩余4式进行近似线性化,则旋转弹药扰动运动方程组为 (5) 引入复攻角和复角速度的概念,令: (6) 利用复攻角偏量和复角速度偏量,则线性化的弹体角运动方程,可进一步简化为如下形式: (7) 由式(7)可得复数形式的特征方程,此处不做展开,则特征方程的根为 (8) 式中:A=a1+a4+ia6ωx0;B=a2+a1a4+iωx0(a7+a6a4)。 特征根λ1,2的性质决定自由扰动运动是否稳定,即当特征根同时具有负实部时满足系统稳定。则可推导得到超高速弹药旋转运动动态稳定性条件为 (9) (10) 此外,旋转弹的固有频率可以表示为以下形式: (11) 当制导弹药的旋转速度和固有频率相同时,弹体会发生共振现象。长时间共振会导致弹体攻角增加产生锥形运动,造成飞行稳定性下降甚至失去稳定,所以滚转稳定转速取值应避开共振转速。 综上所述,滚转角速度应该满足的滚转稳定区域为 (12) 电磁发射超高速制导弹药减旋止摆的主要目的:一方面是滚转运动状态下弹体各方向运动耦合严重,减旋后可采用三通道控制;另一面是减小马格努斯力和力矩的持续作用对弹体飞行及其动态稳定性的影响。 电磁发射超高速弹药减旋止摆方法,主要是针对滚转控制通道的设计,可基于自动控制的负反馈原理,采用滚转角速度反馈和滚转角反馈组成滚转控制稳定回路。内回路为滚转角速度反馈,控制目标为使得弹体滚转角速度降低至0;外回路为滚转角反馈,控制目标为使得弹体滚转角回到初始滚转状态。滚转控制数学模型与式(2)类似,主动控制力矩来自于滚转舵偏角δx。则采用PD控制的舵偏指令表示为 δx=kp(φc-φ)-kdωx, (13) 式中,kp、kd分别为增益系数。 电动舵机作为控制执行机构,可以视作一个带有延迟效果的一阶系统: (14) 式中,τ为时间常数。则电动舵机环节的传递函数可表示为 (15) 根据以上滚转控制模型,可得滚转稳定回路框图,如图3所示。 已知电磁发射超高速弹药气动布局和模型参数,定义初始状态如表1所示。 表1 电磁发射超高速弹药初始状态 笔者通过成熟的气动参数工程估算程序DATCOM计算得到不同飞行状态下的气动参数离散值。在进行弹体外弹道三自由度建模时,可将离散气动参数在不同飞行高度,马赫数和舵偏角下进行插值处理,如表2所示。 表2 电磁发射超高速弹药飞行状态 考虑到电磁发射超高速弹药外弹道飞行过程中,弹体轴向阻力是影响飞行速度的主要因素,当预置舵偏角一定时,轴向阻力系数在不同马赫数和飞行高度的取值情况如图4所示。 事实上,当预置舵偏角分别为0.25°、0.5°和1.0°等小量时,弹体的轴向阻力系数Cx相差不大,反而随着飞行马赫数减小而增大,也随着飞行高度增大而增大。 当预置舵偏角分别为0.25°、0.5°和1.0°,弹体的导转力矩系数在不同马赫数的取值情况如图5所示。由图5可得,当飞行马赫数一定,导转力矩系数是预置舵偏角的倍数关系,即其关于预置舵偏角的导数m2x可认为是一定值,也称为舵效。 同样,当预置舵偏角分别为0.25°、0.5°和1.0°等小量时,弹体的滚转阻尼力矩系数导数m1x在不同马赫数的取值情况如图6所示。由图6可得,滚转阻尼系数导数与预置舵偏之间不再是简单的倍数关系,且舵偏值为小量时,滚转阻尼系数导数变化不大。 由于电磁发射超高速弹药外弹道是一个动态变化过程,气动参数是时变非线性的,笔者根据工程上比较成熟的气动参数估算程序DATCOM进行电磁发射超高速弹药的外弹道气动参数计算仿真,并做了适当简化处理,得出具有一定参考价值的气动数据。 基于MATLAB/Simulink平台搭建电磁发射超高速弹药外弹道仿真模型,求解器选用四阶龙格库塔算法,仿真步长0.01 s,系统延迟0.01 s。 进行电磁发射超高速弹药的质心运动仿真,主要考虑外弹道过程中弹体飞行高度和动压变化情况。带入初始发射条件和不同飞行状态下气动参数插值,并假设除了轴向阻力外,其他气动阻力可忽略。则电磁发射超高速弹药外弹道仿真飞行高度和动压变化曲线如图7所示。 由仿真曲线可知,由于电磁发射超高速弹药初速高达2 km/s,炮口动压极大,约为2.4 MPa,远远超过了弹载电动舵机的主动控制极限,此时只能采用预置小角度舵偏角提供弹体旋转力矩。 电磁发射超高速制导弹药的滚转运动仿真包括主动起旋、急速滚转和减旋止摆3个过程,需要考虑滚转运动稳定性要求并确定极限转速范围。 首先,进行电磁发射超高速制导弹药的主动起旋滚转运动仿真,主要考虑外弹道过程中弹体实际转速、平衡转速以及飞行速度之间的关系。由于预置舵偏角对质心运动影响不大,但是对滚转运动影响很大,假设δ=0.25°,则电磁发射超高速弹药滚转运动角速度和飞行速度变化趋势曲线如图8所示。由图8可得,弹体滚转角速度动态变化趋势基本吻合式(3)、(4)所述分析结果。超高速弹药从无旋状态快速起旋,在实际转速趋近平衡转速的过程中,飞行速度因空气阻力作用不断降低处于动态变化中,平衡转速变化曲线与飞行速度变化曲线具有相同的下降趋势。 其次,由式(10)知,电磁发射超高速制导弹药存在一个与动力系数密切相关的滚转速度上限。各动力系数中所涉及动导数同样可以通过DATCOM计算得到,并在仿真时由马赫数插值得到。笔者在仿真时考虑马格努斯效应,并参考文献[13]所得马格努斯力矩的经验计算公式,认为马格努斯力矩系数在小攻角范围内是旋转角速度的线性函数。 由于存在滚转上限,预置偏角和起控时机的选择决定了超高速制导弹药在无控段是否满足动态稳定条件。欲使得滚转角速度满足动态稳定范围,首先应该设置合适的预置舵偏角,气动起旋过程迅速,快速通过共振转速区域;其次当滚转角速度逐渐趋于平衡转速,应不超过转速上限满足动态稳定条件;最后,减旋止摆过程应该迅速降低转速,防止滚转角速度在共振转速附近振荡。选取不同的预置舵偏角分别为0.25°、0.5°和1.0°,弹体滚转角速度变化情况如图9所示。 由图9可得,弹体因预置舵偏角存在而快速起旋,短时间内穿过共振转速,趋于平衡转速。不同预置舵偏角情况下,弹体平衡转速相差很大;预置舵偏角增加一倍,平衡转速也近似增加一倍;当预置舵偏较大时(δ=1°),弹体滚转角速度很快超出滚转稳定转速上限,这意味着超高速弹药还未通过稠密大气就已经失去稳定;随着预置舵偏角减小,弹体滚转角速度处于滚转稳定区域的时间也相应增加。 考虑到工程实际情况,假设弹载舵机系统最大铰链力矩要求为1 N·m,滚转舵偏角限制为±30°,即来流动压满足q<100 kPa时,弹载控制系统启动减旋止摆控制程序。综合考虑上述限制条件,应设置预置舵偏角δ=0.25°,弹载控制系统中,电动舵机时间常数τ=0.02。控制器采用PD控制,kp=5,kd=1,并当弹体滚转角速度和滚转角满足ωx=0且φ=0时停止仿真。如图10为超高速制导弹药滚转运动阶段滚转角速度变化情况。如图12为预置舵偏角及控制作用下滚转舵偏角变化曲线。 由图10可知,超高速制导弹药外弹道是一个动态变化过程,弹体滚转角速度的稳定范围与其外弹道飞行状态密切相关。超高速制导弹药在无控段,受到气动导旋力矩作用,起旋过程约2.88 s,最大转速147.1 rad/s;当动压下降到100 kPa时,起控时机为15.92 s,控制过程约0.70 s,满足最大舵偏角限制。控制过程中,滚转角速度快速穿越共振转速并收敛到0,远离共振转速且几乎没有振荡,符合预期控制效果。 综上所述,针对电磁发射超高速制导弹药滚转运动,笔者基于实际动压条件进行急滚运动稳定性分析,从而提出主动起旋、高速滚转及减旋止摆的控制策略,经过仿真验证基本达到控制效果,为电磁发射超高速制导弹药工程应用提供一条可行方法。 针对电磁发射超高速弹药炮口大动压条件下,弹载控制系统很难及时实施稳定控制这一工程问题,笔者提出了一系列主动起旋、高速滚转及减旋止摆的控制策略并给出了特定发射条件下具体仿真结果。通过仿真分析得出:当电磁发射超高速制导弹药以2 km/s的初速,50°射角进行发射时,可利用预置舵偏角主动起旋。预置舵偏角的大小对起旋过程时间影响不大,对平衡转速的大小呈比例相关。综合考虑弹体滚转运动稳定性和动压条件之后,选用0.25°预置滚转舵偏角,弹体起旋过程时长为2.88 s;弹体转速可达到最大值147.1 rad/s;弹体减旋时刻为15.92 s;弹体滚转控制通道仅需0.70 s即可将弹体转速减小为0,并且满足预期控制效果。虽然研究对象指的是电磁发射超高速制导弹药,但是该控制策略和方法同样可拓展应用到其他类型的超高速滚转制导弹药。2 滚转运动分析
2.1 主动起旋过程

2.2 转速极限和动态稳定性

2.3 减旋止摆方法

3 滚转运动仿真
3.1 气动参数仿真





3.2 外弹道仿真

3.3 滚转运动仿真



4 结束语
猜你喜欢
兵器装备工程学报(2022年7期)2022-08-10 03:37:18
爆炸与冲击(2022年2期)2022-03-17 07:28:44
数字海洋与水下攻防(2020年5期)2021-01-04 01:40:06
电子测试(2018年22期)2018-12-19 05:12:56
金桥(2018年1期)2018-09-28 02:24:38
四川冶金(2018年1期)2018-09-25 02:39:26
上海煤气(2018年6期)2018-03-07 01:03:22
北京航空航天大学学报(2016年8期)2016-11-16 01:51:08
焊接(2016年8期)2016-02-27 13:05:12
郑州大学学报(医学版)(2015年2期)2015-02-27 14:50:56
