沪苏通长江大桥高墩身钢桁梁精密测量技术
2022-09-01 08:55赵鹏飞
中国水运 2022年8期
赵鹏飞
(中交二航局第四工程有限公司,山东 临沂 273416)
沪苏通长江大桥是我国跨径最大的公铁两用桥,主要工程包括主跨336 米专用航道桥、跨横港沙21×112米钢桁梁桥,钢桁梁在拼装时精度要求较高,为了保证安装精度满足要求,分析了高墩身受温度影响规律,选择在合适时间段,用随动短视线极坐标法与可移动观测装置配合测量的方法,减少了误差累计,提高了测量精度。
1 高墩身受温度影响及解决措施
沪苏通长江大桥墩身高大,墩身高度50-65m。高墩身在温度、日照、风等作用下会发生变形。钢桁梁首节间拼装施工以墩身为依托,因此必须考虑墩身变形对钢桁梁精确定位的影响。
1.1 高墩身变形监测
承台和墩顶均布设变形监测点,方便进行墩顶、墩底变形量的对比。考虑到高大墩身可能存在纵桥向和横桥向的变形,墩顶测点布设位置靠近墩身外侧且位于墩顶的横桥向轴线上。墩底测点布设在承台上,为墩顶测点的投影点。测点布设情况,如图1所示。
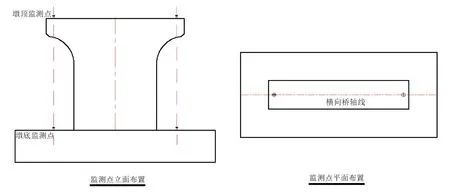
图1 高墩身变形监测点布设示意图
设置徕卡 TS50 全站仪于相邻墩承台顶面,采用全站仪差分法,按照1 次/2h 的频率对变形观测点进行连续观测。测量结果如图2所示。
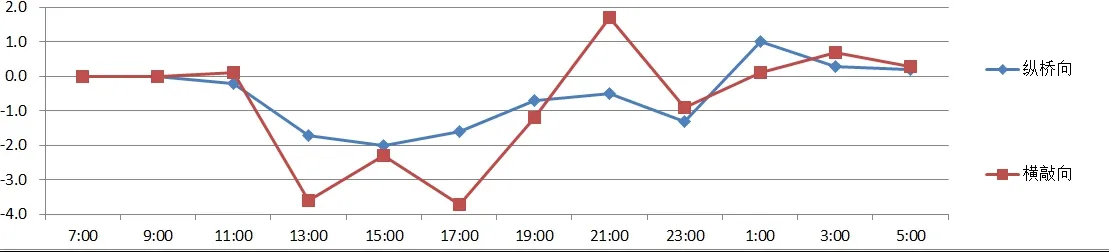
图2 正桥10#墩墩顶变形过程图
由图2可知,高墩身在外界环境的影响下确实存在变形,且横桥向变形量大于纵桥向变形量,最大变形量为3.7mm。
众所周知,高大墩身受温度影响存在热胀冷缩现象。不同温度条件下,墩身会有不同的伸长量(收缩量),使得墩顶的绝对高程出现变化。该变化量对钢桁梁定位精度的影响程度,需要进一步分析研究。热胀冷缩的变化量可用式1 计算:



综上所述,在钢桁梁的精密定位时,高墩身的变形是一个需要顾及的因素,需要进行修正和消除。
1.2 高大墩身变形的应对措施
考虑高墩变形复杂性,本工程采取以下措施修正和消除高大墩身变形对测量精度的影响:
1.2.1 消除墩顶水平变形的措施
由墩身水平位移连续监测的结果可知,夜间23:00以后,墩身在水平方向上的变化极小。基于以上认识,提出了避让墩顶水平变形的应对措施,即在墩身温度恒定、施工荷载平衡时,将测量基准引测至墩身顶面,方便进行钢桁梁拼装。
1.2.2 修正墩顶竖向变形的措施


若此时墩顶控制点的高程为,修正后的高程应为:

2 钢桁梁首节间安装测量
钢桁梁首节间钢桁梁是后安装钢桁梁节段的基准,其空间位置是否准确,直接影响到钢桁梁的空间姿态。所以,首节间钢桁梁定位精度要求高,具体技术指标见表1所示。

表1 首节间钢桁梁安装主要技术指标
2.1 利用岸侧控制点可行性分析
钢桁梁首节间钢桁梁安装前,首先考虑了利用岸侧控制点,采用极坐标法直接测量特征点坐标。放样仪器选用徕卡TS50 全站仪,其主要精度指标为测角0.5″,测距精度0.6mm+1ppm。
2.2 随动短视线极坐标法的应用
随动短视线极坐标法是对变形体精密定位的一种方法。如悬索桥塔顶索鞍格栅定位时,格栅就是一个空间三维变形体,利用夜间,经多次测量将布设在塔顶格栅附近的工作基点精确测出,然后架设全站仪,以极短的视线进行格栅定位,这种方法就叫做随动短视线极坐标法。随动短视线极坐标法具有如下特点:
2.2.1 工作基点与变形体的相对关系好
控制点是建立在高大墩身的墩顶,即控制基准是建立在变形体上。当利用该控制基准进行放样时,控制基准与变形体可认为同步变化,放样的点位与变形体之间的相对关系在此时应为最佳的匹配关系。
2.2.2 放样视线短,定位精度高
测量定位主要误差来源包括仪器自身精度、仪器对中误差、镜站置镜误差。

(2)镜站置镜误差。棱镜杆圆水准管气泡精度为8′,采用镜高为0.1m 的棱镜测量,对点中误差±0.3mm,量高中误差±0.2mm。
根据上述分析,按照误差传播定律,算得徕卡TS50 全站仪三维坐标法测量精度为平面点位中误差±0.8mm,高程点位中误差±0.4mm。
综上所述,利用随动短视线极坐标法或基于自由设站的随动短视线极坐标法能够达到亚毫米级的定位精度。
3 实施效果
首节间钢桁梁完成定位后,测量人员对其安装状态进行了全面复测,技术指标满足设计和规范要求。具体结果见表2。
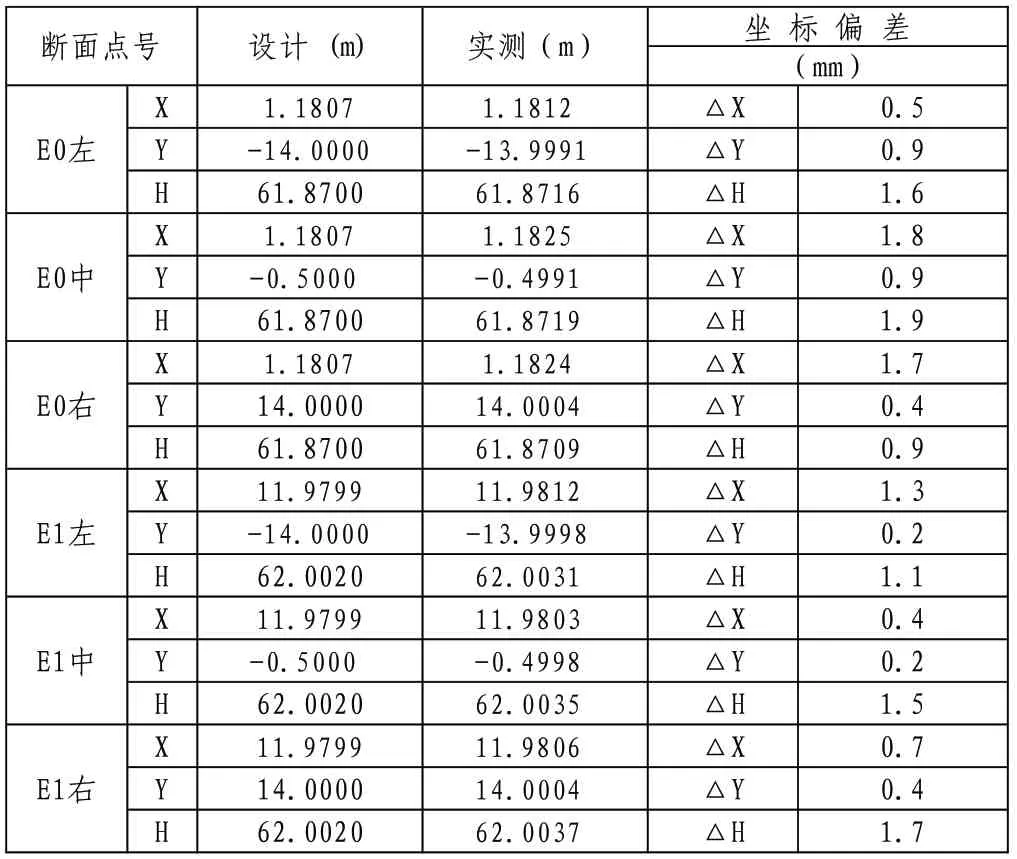
表2 钢桁梁10-11#墩首节间安装定位成果表
目前,沪通长江大桥钢桁梁拼装工程已结束,梁体首节间轴线偏差均不大于2mm,标高偏差均不大于2mm,整跨钢桁梁拱度、奇偶连线偏差等各项技术指标均满足规范及设计要求。
4 结论
通过对高大墩身在外界环境影响下的变形情况进行了定量分析,提出了避让墩身水平变形、修正墩身竖向变形的解决措施;同时在钢桁梁首节间定位采用了短视线极坐标法,该方法一次测量精度可达亚毫米级,放样精度高,同时,又避免了结构变形对测量定位精度的影响;分析了传统三脚架在钢桁梁测量方面的不足,研发了一种可移动升降观测装置,解决特大桥梁钢箱梁,钢塔、钢桁梁施工架设仪器稳定性、安全性差的问题。结果表明,梁体首节间轴线偏差均不大于2mm,标高偏差均不大于2mm,整跨钢桁梁拱度、奇偶连线偏差等各项技术指标均满足规范及设计要求。
猜你喜欢
计算技术与自动化(2022年1期)2022-04-15
科学家(2022年3期)2022-04-11
特区文学·诗(2021年6期)2021-12-22
青年文学家(2020年22期)2020-08-31
小雪花·初中高分作文(2019年2期)2019-06-27
试题与研究·教学论坛(2017年32期)2018-01-25
建材发展导向(2016年6期)2017-01-17
中学生数理化·高二版(2016年5期)2016-05-14
建筑工程技术与设计(2015年33期)2015-10-21