
地铁市域快线工务智能巡检设备运用与探索
2022-08-31 07:48陈飞
智能城市 2022年6期
陈 飞
(成都地铁运营有限公司,四川成都 610051)
2020年全国轨道交通新增运营里程1 349.70 km,新增运营车站836座。截至2020年12月31日,内地共有44座城市开通城轨运营里程7 715.31 km,运营车站5 189座。2020年成都轨道交通先后开通5条地铁线路(运营里程187.5 km),线网累计开通13条(运营里程558 km),包括有轨电车1条(运营里程39 km);第四期规划批复约176.6 km线路,远期(2035年)规划轨道交通线路1 389 km,市域铁路线路277 km。国家全面迈入轨道交通大发展阶段,成都地铁市域快线速度达140 km/h,包括17号线、18号线,后续还将开通速度达160 km/h的市域快线。
市域快线具有延伸远、区间长及运行速度快的特点,为工务设备养护带来全新挑战。随着客观条件的改变及线路设备高标准的要求,必须改变维保模式,投入现代化、智能化的巡检设备。
1 工程概况
18号线作为成都轨道交通的首条市域快线,连接火车南站与天府机场两大交通枢纽,线路全长约69.394 km,共设置13座车站,车辆段1座,拥有6个超过5 km的长大区间,平均站间距5.963 km。其中,天府新站至三岔站区间长达19.16 km,正线设计最大行车速度为140 km/h。
2 现有巡检模式
为了确保线路设备质量,根据修程要求,工务维保单位需对线路设备进行每日巡检,两次巡检间隔不超过48 h。巡检时必须以约2 km/h的速度全面查看线路,巡视内容包括钢轨、道岔、道床、轨枕、联结零件、排水设施、标志标牌等。
18号线平均每3 km设置区间风井、隧道斜井及疏散通道,作为施工作业进出通道,结合车站、区间进出通道布局情况,每名巡检人员单次作业巡检工作量约6~8 km。目前,正线需18人同时巡检作业。运营延时将严重影响巡检作业的顺利进行。
以兴隆站-天府新站-三岔站区间为例,兴隆站-天府新站区间距离为5.28 km、天府新站-三岔站区间距离为19.16 km(含一座矿山法施工隧道,长9.67 km)。两个区间共需7名巡检员同步开展作业,巡检员需从车站、隧道斜井、区间疏散通道等位置分散进出,巡视径路复杂,人员需求量大。天府新站-三岔区间穿越龙泉山脉,隧道斜井、区间疏散通道处于山区,从区间中部进出存在人身隐患,安全卡控难度大,可能出现紧急情况。
3 智能巡检机器人情况
传统人工步行巡检方式受线路客观条件限制及巡检人员业务技能、责任心等影响,人力投入较大、巡检效率不够高,可能出现漏巡、漏检问题,急需高效、高科技设备分担人工巡检作业。引入轨道智能巡检机器人,可以在一定限度释放劳动力,提高巡检效率及准确率[1-2]。
3.1 机器人基本情况
轨道智能巡检机器人采用锂电池供电,可以乘坐2人;外形尺寸1 750 mm×1 843 mm×1 120 mm,自重约285 kg;巡检机器人行车速度为0~15 km/h,续航里程不低于50 km,续航时间不少于3 h,适用线路最大坡度为40‰;具有电机制动、电磁刹车、手刹3种制动方式,常规制动距离小于30 m、紧急制动距离小于5 m(15 km/h,平直轨道);检测设备防护等级为IP65,定位精度不超过2 m;设备不计轴,不会影响其他专业设备。
智能巡检机器人使用模式为机器调试(激光标定、设备连接、电子地图录入)→首次线路运行(数据采集)→线路建模→二次线路运行(边检边报)→病害离线处理、病害分析。
3.2 机器人试用情况
2021年1月,18号线智能巡检机器人开始设备调试,在18号线试车线、正线兴隆-天府新-三岔等区间进行超过20次调试及试跑,验证智能巡检机器人适用于18号线,具有长大区间的线路特点。
针对布置扣件松动(脱落)、轨距块缺失、螺栓松动、道床面异物、调距扣板缺失(断裂)等常见病害,对巡检机器人的在线检测与离线病害识别功能进行测试。
功能验证及验证结果如表1所示。
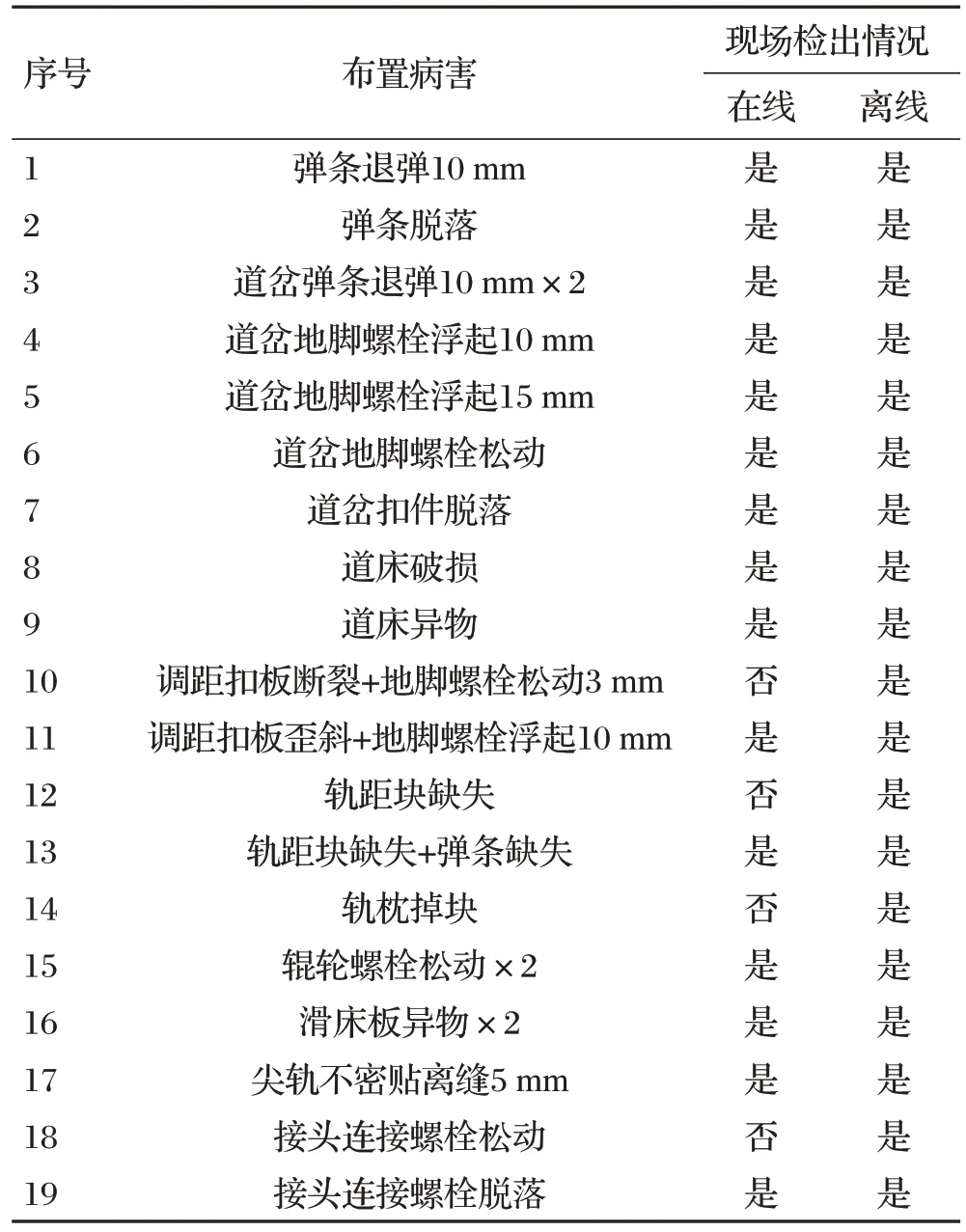
表1 功能验证及验证结果
由表1可知,巡检机器人能够较好地识别道床异物、弹条松动(脱落)等病害,精度较高,试验阶段现场布设各类病害19处,在线检出15处,检出率79%;离线检出检出19处,检出率100%。硬件方面,巡检机器人的运行速度、续航里程、荷载能力、爬坡能力、制动能力、检测范围等实际性能指标满足设计标准及使用需求。
4 巡检实施情况
在市域快线引入轨道智能巡检机器人,可以加强轨道设备风险管控,弥补人工作业不足,在提升作业效率、质量的同时推进维保作业的信息化、智能化,降低作业人员从区间进出轨行区发生人身安全隐患的概率。
巡检机器人上道作业前,完成施工方案编制及应急预案编制。设备操作需要2名负责人,施工负责人(1人)负责办理请销点手续,按照作业方案组织、指挥、监督作业过程,调度沟通;设备操作(1人)负责机器人上线后的操作控制及轨道数据采集。针对可能出现的平板电脑通信中断、电机自保护或故障、同步轮带断裂、电磁刹车无法释放、电池亏电或故障、脱轨等故障,提前进行预想并编制解决方案,同步梳理紧急情况下轨行区可以存放机器人设备区域,确保突发情况不影响次日行车。
18号线作业点时间基本为0:40—4:20,根据试用情况除去请销点、设备搬运时间、上道准备及适当预留时间等环节,机器人实际作业时间约2 h。机器人组装完成,通电开机,观察视觉模块激光线对齐情况,以5 km/h速度进行低速短距离(20 m)试跑,确认机器人通信、驱动、制动和数据采集功能正常后正式行驶,行驶速度不超过15 km/h,单次作业可以完成约28 km的线路巡检任务。结合作业点情况,在兴隆-三岔区间开展巡检作业,区间全长24.44 km。上下行作业各需1次作业点,由2人完成设备操作,与人工巡视相比,可以减少5人。
巡检时间节点梳理如表2所示。
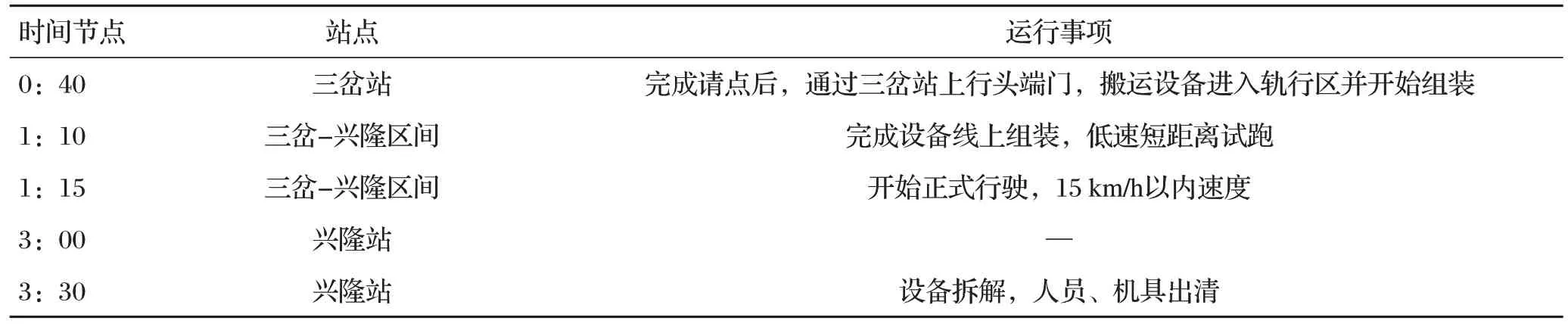
表2 巡检时间节点梳理
试用巡检机器人时开展操作人员培训,确保工作人员熟悉机器人的组装、拆卸、操作、日常小故障处理,具备独立开展作业能力。
5 后续研究情况
5.1 全线巡检作业开展
结合2021年机器人使用情况对修程进行优化,考虑18号线线路总长情况及日常各专业作业对计划的需求,逐步推广巡检机器人使用。
(1)初期巡检方式为巡检机器人+人工巡检,每月对全线采取机器人覆盖1次,将全线划分为火车南-兴隆(23.952 km)、兴隆-三岔(24.398 km)、三岔-机场北(21.078 km)3个区段进行累计覆盖,需6个动车作业点(上下行各3个)。作业结束机器人返回车站库房,将电池带回充电,次日完成数据分析。当周有机器人巡检作业时,人工开展1次步行巡检,无机器人巡检情况下隔日开展巡视,人工巡检时对机器人巡检发现且当场无法处置的问题进行复核、整改,同步侧重智能巡检机器人无法覆盖的道岔、辅助线、联络线、疏散平台及以上部位。
(2)结合远期新线规划、建设、投用,进一步补充智能巡检机器人数量,力争达到50 km/台配置标准,机器人巡检由初期的每月1次加密为每2周1次,机器人巡检占比不低于50%。
(3)结合智能巡检机器人的运用,完善修程,优化步行巡检要求、标准,由每日1次(不超48 h)调整为每周1次,巡检侧重巡检机器人无法覆盖范围及上部土建结构设备,提高巡检覆盖范围、内容并注重巡检质量,人员力量更多投入故障处置、设备整修中。
(4)巡检作业开展过程中,提升巡检机器人作业安全卡控,完善作业指导书等内容,研究与探伤小车等巡检设备共用作业点及兼顾与其他作业联控,减少巡检机器人对作业区域要求。
5.2 巡检作业提升策略
持续优化、提升检测精确度,减少误报率,保证识别功能具有普遍性。研究道岔及有护轨地段钢轨等结构较复杂的轨道设备检测,提高检测全面性。积累经验、技术,为后续巡检机器人改进及车载式巡检系统打下基础。
6 结语
十四五是轨道交通大发展阶段,设备运维面临非常大的挑战与压力,应充分研究、运用智能化、机械化的作业工器具、手段,智能化检测、监测设备是下一阶段的研究方向与重点和解决问题、提升效率、提高质量的有效方式。
猜你喜欢
中学生数理化·八年级物理人教版(2022年9期)2022-10-24
中国集体经济(2021年29期)2021-09-22
宁波通讯·综合版(2020年1期)2020-07-24
现代城市轨道交通(2020年1期)2020-02-14
铁道通信信号(2020年11期)2020-02-07
中国外汇(2019年13期)2019-10-10
北京信息科技大学学报(自然科学版)(2016年6期)2016-02-27
中学理科·综合版(2008年9期)2008-10-15
