舰载跟踪雷达中频回波信号的逼真模拟
2022-08-30 08:57:10张友益
舰船电子对抗 2022年4期
陈 翰,张友益
(中国船舶集团有限公司第八研究院,江苏 扬州 225101)
0 引 言
雷达系统模拟是设计和研究雷达的一种重要手段,雷达系统模拟是将雷达发射信号发射、传播、调制、接收及信号处理过程不断复现及优化雷达的模拟方法。雷达系统模拟的核心是精准构建系统中各个部分模型,对雷达回波信号的模拟是雷达系统模拟的核心。在雷达回波模拟中主要的2类散射回波模型是目标回波模型和杂波模型,对雷达目标回波的模拟着重关注雷达目标的后向散射模型。
雷达目标散射截面积的获取方法主要有严格理论计算、暗室缩比或外场全尺寸测量、高频软件计算雷达反射截面积(RCS)方法。其中严格理论计算耗费时间长,且对于复杂的扩展目标模型并不适用;在外场进行全尺寸测量准确度高但耗资巨大,且姿态角等变量难以精确控制;虽然室内缩比模型测量的RCS数据准确度较高,但无法模拟目标的动态信息和仿真场景变化;近些年国内外研发了很多种电磁计算软件,可结合CAD软件对目标建模并计算各种静态RCS数据。目前雷达回波模拟技术还主要是对目标的幅度和相位进行模拟,对于目标的姿态角、极化特性、起伏特性和频率特性等重要信息模拟效果较差。
本文对跟踪雷达目标的中频回波进行模拟,提出了一种对任意姿态角、极化特性和频率特性下的雷达中频回波信号的逼真模拟方法。首先对雷达发射信号和相控阵方向图建模,研究了目标运动和坐标转换方式。主要以F22飞机为例,在跟踪雷达体制和仿真场景下,对某特定时刻姿态角、极化方式和频率特性下的雷达中频回波进行了模拟,与F22实测一维距离向数据进行对比,得到了目标回波信号的逼真模拟结果。
1 雷达发射信号模型和目标坐标转换模型
1.1 发射信号模型
线性调频信号中复包络为:
()=ejπ,0≤≤
(1)
数学表达式为:

(2)
式中:调频斜率=,为带宽,为脉宽;为发射信号中心频率。
相控阵方向图函数:
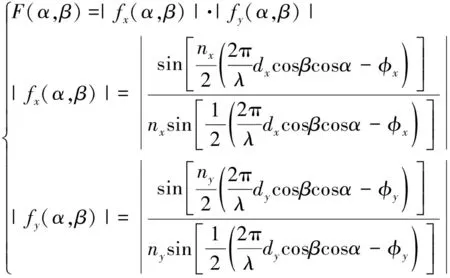
(3)
式中:、分别为行列阵元数;、分别为行列阵元间距;、分别为行列阵元相移;为天线波长。
1.2 目标姿态角


对于目标转动引起的姿态角变化,计算转动后目标相对初始位置的位移得到转动后目标的位置信息和姿态角。
1.3 目标运动建模
假设目标的运动是加速直线运动,其他复杂的运动可以分别投影在、、平面进行计算。对于航迹已知的运动,直接由目标运动到某时刻的瞬时信息计算姿态角。目标的初始位置设为(,,),俯仰角为,方位角为,加速度为(,,),速度为(,,),则匀加速运动到时刻的坐标为:

(4)
目标瞬时坐标为((),(),()),计算瞬时径向距离、回波延时、方位角和俯仰角:

(5)
1.4 坐标系转换
在甲板坐标系中,航向角为舰艏与正北的夹角;纵摇角为舰艏相对于水平面的转角,舰艏抬高为正;横摇角为甲板绕舰艏与水平面的夹角,右舷下降为正。舰船上一点在大地直角坐标系中的坐标为(,,),转换为甲板坐标系中的坐标(,,)为:
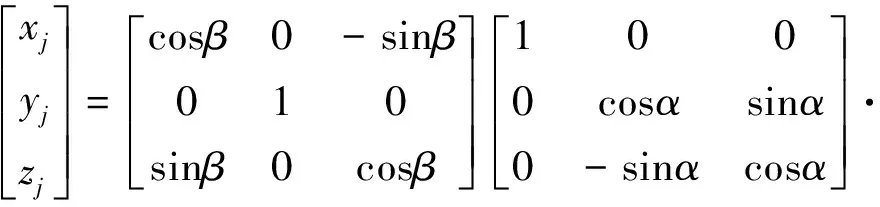
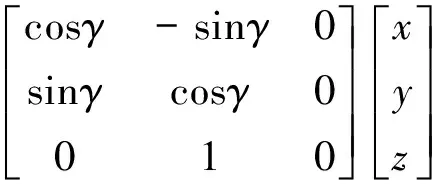
(6)
甲板坐标系中的坐标(,,)转换为大地直角坐标系中的坐标(,,):

(7)
2 扩展目标的仿真方法
雷达波照射到电大尺寸目标,在能获得目标的固定姿态角、极化方式、频率特性下的RCS值时,可以使用冲激响应法将目标的运动、RCS等信息与回波信号进行耦合。将特定的环境参数、频率特性、极化特性、目标姿态角和传输损耗等参数构成一个线性系统(),得到更加逼真的模拟效果:
()=()*()
(8)


(9)
目标回波信号表示为:

(10)
式中:为雷达发射信号的调制幅度;为回波时延。
雷达接收机接收到射频频段的信号进行下变频操作,将时延、多普勒频率代入式(10),得到单个散射点的目标回波中频信号为:


(11)
扩展目标个点的目标中频回波信号为:

(12)
扩展目标回波的冲激响应为:

(13)
将RCS数据代入式(13)得到扩展目标回波,下面对目标散射截面积进行仿真。
3 基于高频电磁仿真软件的目标RCS精确模拟方法
在FEKO中设置求解参数:入射角为45°,雷达载波频率为9 GHz,激励源近似设置为平面波,求解方法选择大面元物理光学法(LE-PO)。本文对飞机进行三维建模后利用FEKO软件计算各种距离、姿态角下的瞬时RCS数据并用于模拟雷达特定时刻的目标中频回波。在FEKO中建立F22飞机模型并进行仿真,网格划分如图1所示,仿真结果如图2所示。
图1 网格划分后的F22飞机模型

图2 频率9 GHz,入射角45°,HH极化下 F22的RCS图
4 杂波和噪声
雷达回波信号中除目标和干扰外的其他散射现象为雷达杂波,K杂波广泛应用于高分辨率雷达海杂波的模拟。使用球不变随机过程法模拟K分布杂波的幅度谱和功率谱,接收机噪声一般为高斯白噪声。目标及其传播损耗、杂波、噪声各个部分矢量叠加得到雷达接收端的中频回波信号。
5 仿真流程及结果
仿真模型中跟踪雷达参数如下:
工作体制:放大链式频率捷变体制、脉组捷变频和动目标处理兼容、数字动目标检测(MTD)、单脉冲角跟踪和光学辅助跟踪与监视。
跟踪性能:最大距离跟踪速度≥900 m/s;最大距离跟踪加速度≥200 m/s;跟踪范围:0~360°。
抗干扰能力:抗宽带阻塞干扰;抗窄带瞄准干扰;抗距离拖曳干扰;抗速度拖曳干扰;抗角欺骗干扰;抗无源杂波干扰;抗气象干扰。
分辨率:方位不大于2°;仰角不大于2°;距离不大于150 m。
抗干扰措施:脉间频率捷变;脉组间频率捷变;射频掩护技术;脉冲重复周期抖动;MTD信号处理;距离前沿跟踪;被动无源跟踪;雷达光电复合跟踪。
仿真参数:峰值功率35 kW;天线增益31 dB;天线阵元数100个;天线转速24 r/m;极化方式为HH极化;信号带宽150 MHz;载频9 GHz;脉冲宽度0.01 μs;带宽300 MHz;脉冲重复频率4 000 Hz;噪声系数1 dB。
仿真场景:雷达初始的波束指向为 0°,雷达天线波束扫描方向为顺时针,飞机在开始仿真时处于波束指向方向,距雷达的水平距离10 km、飞行高度 2 km处,俯仰角45°,以方位角0°和 300 m/s 的速度飞向雷达。杂波为K分布模拟的海杂波环境。为了减小计算量,直接对相应波门内的回波数据进行处理,给出了单个目标回波的波形和真实环境场景下的回波图,并在脉压后与真实飞机模型的一维距离像作对比,如图3~图5所示。

图3 雷达中频回波时域波形

图4 仿真一维距离像
图5 方位角0°的一维距离像实测数据
6 结束语
本文先计算目标运动过程中特定时刻的姿态角、运动信息、距离延时等信息,计算静态仿真数据得到运动状态下特定时刻的雷达中频回波信号,包含幅度相位信息、极化特性、频率特性和幅度起伏特性等目标特性。为进一步研究跟踪雷达和目标回波特性提供了方法和数据支撑。
猜你喜欢
现代财经-天津财经大学学报(2022年5期)2022-06-01 06:08:32
科学与信息化(2021年30期)2021-12-24 08:00:20
电测与仪表(2017年20期)2017-12-19 05:14:24
电子测试(2017年15期)2017-12-18 07:18:51
西部广播电视(2015年17期)2016-01-18 03:46:22
西北工业大学学报(2015年3期)2015-12-14 13:08:44
电源技术(2015年1期)2015-08-22 11:16:18
遥测遥控(2015年2期)2015-04-23 08:15:22
贺州学院学报(2015年1期)2015-02-28 17:56:46
现代防御技术(2014年6期)2014-02-28 18:26:39