航线基本点相关计算软件的设计与实现
2022-08-29 06:59彭建亮熊超刘挺君
电脑知识与技术 2022年20期
彭建亮,熊超,刘挺君
(中国人民解放军93995部队,陕西西安710300)
1 引言
在空中领航领域里,一定的领航计算能力是空中航行指令师必须掌握的一项技能,然而领航计算种类繁多且复杂,传统的领航计算方法,往往速度稍慢且存在较大人为误差的风险,尤其对于新员来讲存在一定难度[1-3]。在领航学员初上飞机之前,地面演练以航线基本点的工作程序训练为主,演练时教员要随机出题自行计算对学员进行测试,计算的速度以及准确性很难保证,且在航空工业快速发展的今天,转场飞行中在航线上如何准确确定转弯提前量也是本单位存在的现实问题。
随着现代移动平台的迅猛发展,智能手机的普及,方便了人们的生活,逐渐成为人们获取信息的主要设备。为顺应信息潮流,军队的信息化建设成为当前建设的重要目标。Android系统占据着移动平台的较大份额,所以开发适用于Android 用户日常使用的相关软件成为现在的一大热门[4-7]。
针对我部在任务中存在的现实问题,结合所学的相关理论知识和软件开发知识进行软件开发,通过手机App即可完成相关的领航计算,使飞行人员能够快速、简便、准确地进行领航计算,使领航计算更为便捷高效,进而达到利用时间的充分性,提高飞行的准备质量,保障飞行安全。同时也进一步提高军队信息化建设水平。
2 软件计算原理
1)速度时间距离换算公式:

式中S、W、t分别为距离、速度、时间。
2)由观测角、真高求偏航距离
垂直观测角(ZG):观测线同铅垂线之间的夹角(观测线是观察者和观测点之间的连线);
真高(H真):以飞机正下方地面为基准的高度,即飞机到其正下方地面的垂直距离;
偏航距离(Sp):飞机偏离航线的距离。
如图1 所示,从图中可以看出偏离距离与真高之间的关系为:

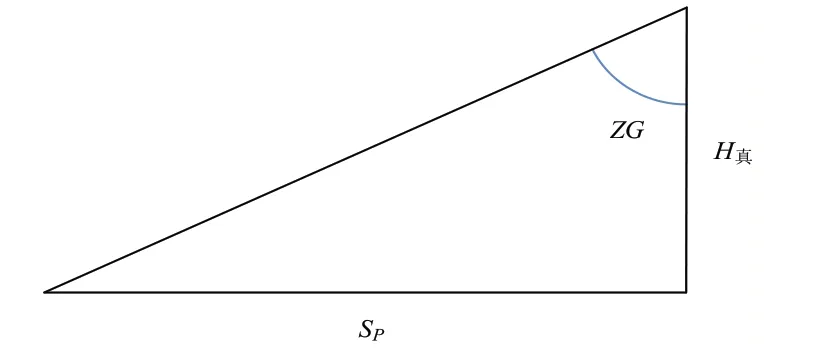
图1 求偏航距示意图
3)按PI系数修正航迹
偏离角(PI):原航线和新航线之间的夹角即为偏离角;
偏离角系数(CPI):偏航一千米时对应偏离角的度数;
未飞距离(S未) :飞机位置与预定点间沿航线方向上的距离。
按PI系数修正航迹指的是:从飞机的实际偏航位置开始,确定新的航线,通过PI,求出新的航线角和应飞航向,使飞机沿新航线飞往预定点,具体过程如图2所示。

图2 按偏航距离求偏离角
从图中可以看出:

偏离角度一般都比较小,因为小角度的正切函数值,约等于该角度的函数值,将弧度变为度,式(3)可写成:

不难发现当S未确定后,60°S未是一个常数,即为偏离角系数(CPI),将式(4)整理得:

得知偏离角系数后,根据偏航距离即可得到偏离角进行改航,按PI修正航迹具体如图3所示。

图3 按PI角修正航迹
由图3可得,新航线上的应飞航向计算公式为:

4)求切入下边航线提前量
飞机在转弯过程中,重力在水平方向上的分力为飞机提供转弯的向心力:

式中,g = 9.8 m s2= 127 × 103km h2,γ为转弯坡度,对公式进行整理后可知转弯半径为:

求切入下边航线提前量其实就是由飞行速度及转弯坡度计算转弯半径,再根据转弯角度进而计算出切入下边航线提前量,具体如图4所示。

图4 求转弯提前量示意图
对飞机的转弯过程进行分析不难发现,转弯提前量与半径之间成正切关系:

式中α为转弯角度,进一步整理可得:

3 程序设计
3.1 软件总体设计
该软件的设计是使用基于Android系统的开发软件AIDE,设计的在移动终端设备上使用的手机App。软件框架结构如图5所示,主要包括输入模块、显示模块和计算模块三个部分。

图5 系统总体框架
3.2 功能模块分析
1)输入模块
如果要完成航线基本点程序的相关计算,首先需要用户进行数据输入,软件所有相关数据可以通过智能设备的触屏直接进行输入,这一功能由可以支持触屏输入的编辑框Edittext 来提供支持。输入模块的主要任务是在各参数编辑框输入参数并实现计算的监听,换言之就是当用户点击按钮的时候监听器会去调用相应的处理方法,流程见图6。
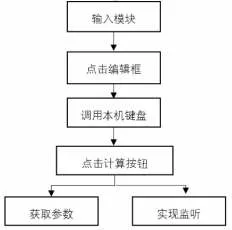
图6 输入模块流程
2)计算模块
系统要实现整个的计算功能,实现其真正的意义,那么计算模块就是整个系统的核心模块,没有计算模块系统就无法顺利地完成相关计算,也就无法达到用户的需求。因此,计算模块的设计就是该系统的设计重点。若系统想要快速地处理用户的输入,并且准确完成航线基本点程序的相关计算,计算模块的相关设计就显得尤为重要。当输入模块的监听传到计算模块中时,计算模块就要根据相应的方法进行进一步的处理,该模块主要是对输入进行逻辑判断和调用相应的计算公式,在内部完成计算,然后输出用户需要的内容,计算模块的流程图见图7。
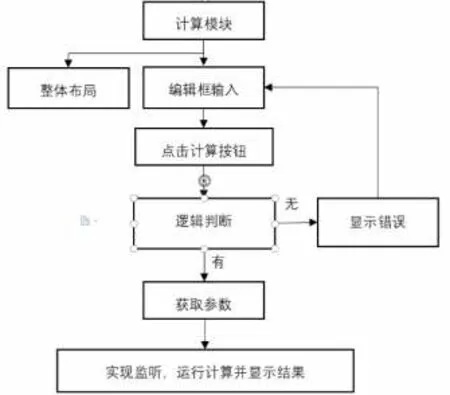
图7 计算模块流程
3)显示模块
显示模块主要用于完成描述计算器的显示区,用户最终的计算结果和一些其他信息通过该区域进行显示,同时该模块还将提供调用和设置显示的具体方法见图8。
图8 显示模块流程
3.3 软件界面UI设计
航线基本点相关计算软件采用的是基于JAVA语言的移动端Android App 开发软件——AIDE 设计与实现,界面简单实用,没有冗余页面[8-12]。如图9所示。

图9 航线基本点计算软件界面
软件界面从上向下依次为距离输入框、时间输入框、未飞距离输入框、观测角输入框、真高输入框和计算按钮,最后为结果输出框,一个界面即可完成航线基本点程序设计到的所有计算,用户输入相关参数后,通过单击计算按钮,即可得出所需要的相关数值。
4 软件应用举例
本软件仅采用了基于Android的UI设计和少量的JAVA语句,将航线基本点计算包括根据距离和时间求应飞速度、根据观测角和真高求偏航距离、根据偏航距离求取偏离角系数、根据转弯速度角度和坡度求转弯提前量等4 部分计算功能集成到一个App 里,适用于平时航线基本点的计算,以及在执行飞行任务时解决实施航线基本点的快速计算。
求应飞速度、偏航距离、偏离角系数为一个软件界面,操作时只需输入相应参数,然后点击计算按钮即可获取结果。当输入航线距离45km、飞行时间5分30秒、未飞距离35km、观测角36度、真高4km,点击“计算”键后,计算结果如图10所示。

图10 航线基本点计算
从图中可知:地速约为491km、偏航距离约为2.9km、偏离角系数约为1.7,所有计算结果与领航计算尺得到的结果一致,但计算明显快捷、方便了许多。
求切入下边航线提前量计算时,仅需输入飞机速度、转弯角度和转弯坡度,然后点击“计算”键就可以通过软件得到所需的转弯提前量,当输入飞机速度540km/h、转弯角度35度、转弯坡度15度点击“计算”键后,计算结果如图11所示。

图11 切入下边航线提前量计算
从图中可知:转弯提前量约为2.7km,所有计算结果与领航计算尺得到的结果一致,但计算明显快捷、方便了许多。
5 结束语
在科学技术手段不断发展过程中,计算机技术在各个领域中广泛应用,计算机软件也给人们的工作、生活以及学习带来积极的影响,高效率的计算能力和高精度的计算成为现实需求,传统心算尺算已较难满足这一特点,此设计航线基本点相关计算软件能够完成速度时间计算、由观测角和真高求偏航距离、由未飞距离求偏离角系数、求取转弯提前量的相关计算,可以在一定程度上解决心算尺算速度慢、精度低的问题,满足现实需求。本软件经过试用证明,达到了预期的效果,该软件的研发对提高领航工作效率有着十分重要的意义。
猜你喜欢
心声歌刊(2021年5期)2021-12-21
草原歌声(2020年3期)2021-01-18
电脑知识与技术·经验技巧(2020年9期)2020-01-16
计算机与网络(2018年10期)2018-06-14
江苏教育·中学教学版(2014年4期)2014-08-18