
基于VI-motorcycle的某大排量摩托车操纵稳定性仿真分析(2)
2022-08-29 13:58:38刘兴君李金波余大江
疯狂英语·初中天地 2022年9期
刘兴君 李金波 余大江
(重庆交通大学机电与车辆工程学院)
(上接2022 年第6 期)
2.2 直线仿真试验
直线行驶仿真试验主要作用是为了分析评估摩托车在直线行驶的稳定性。直线行驶稳定性是指其能抵抗干扰而保持稳定行驶的性能,是操纵稳定性的重要内容。这里直线行驶用的路面是比利时路面,见图8 所示。

图8 比利时路面
在VI-motorcycle 软件中输入直线加速行驶工况的参数,执行仿真试验。设初始速度为15m/s,纵向加速度为5m/s²,时间为20s。图9 所示为该型摩托车以时速36km/h加速到157km/h 的直线加速仿真试验图,图10 为直线加速仿真结果。
图9 直线加速
由上图的纵向速度结果可知,摩托车从15m/s 加速到43m/s,在4.5s 时进行了第一次换挡;在8.2s 时进行了第二次换挡;在10s 时进行了第三次换挡;在12s 时,第四次换挡之后一直加速,达到43m/s。其横摆角在摩托车换挡时发生上下波动,波动不大,在高速时,其值较小,横向比较稳定。侧倾角波动不大,比较稳定,俯仰角在加速时发生波动,比较大,垂向性能不是很好。
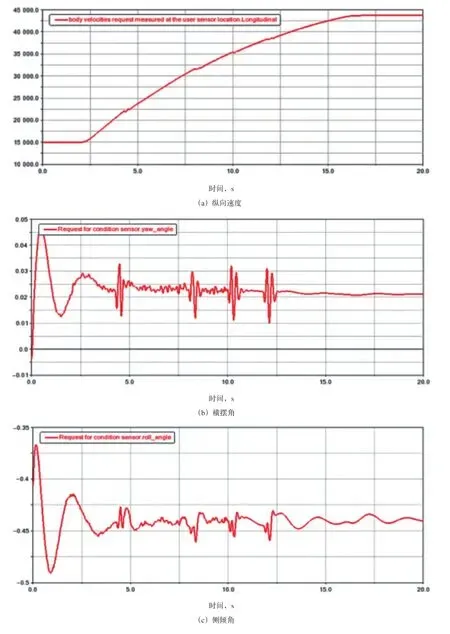
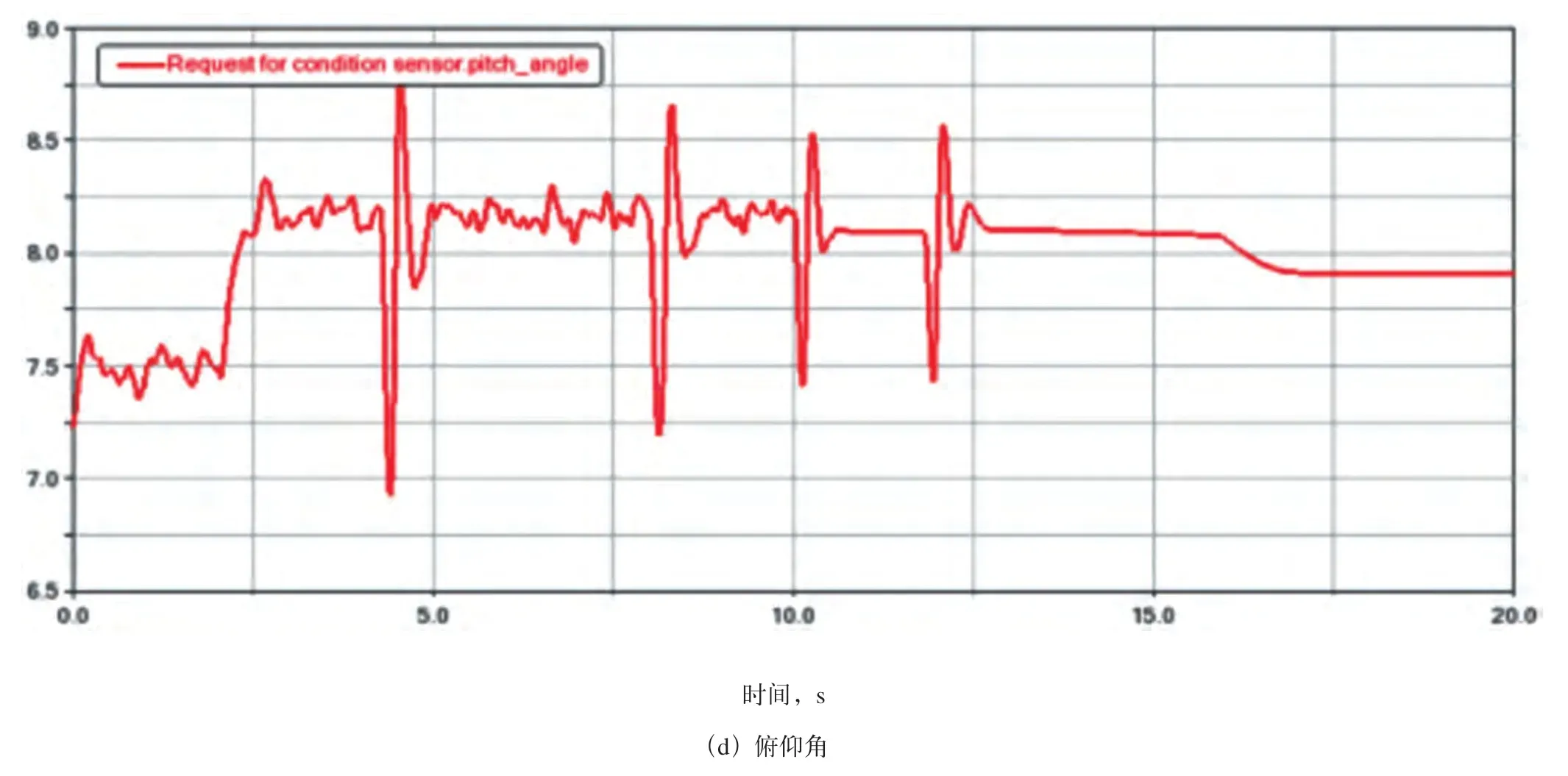
图10 直线仿真结果
2.3 绕八字仿真试验
该仿真执行绕八字,通常是操控性和机动性评估的一部分。摩托车以恒定的纵向速度在闭环中执行。其仿真路面如图11 所示。
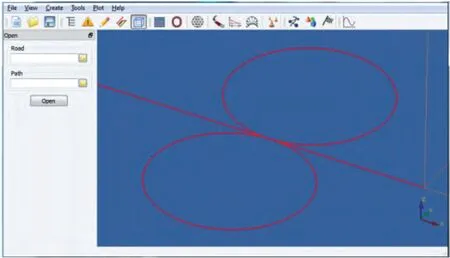
图11 八字路面
在软件中输入八字路径的半径和初速度等参数,执行仿真,其仿真动画如图12 所示,仿真结果如图13 所示。
摩托车在进行绕八字运动时,其横向速度在0.055m/s,比较稳定;横向加速度为4.5m/s²,在绕圈时其值比较稳定;侧倾角在27deg 左右浮动;其转向角在11deg 左右浮动,值比较稳定。
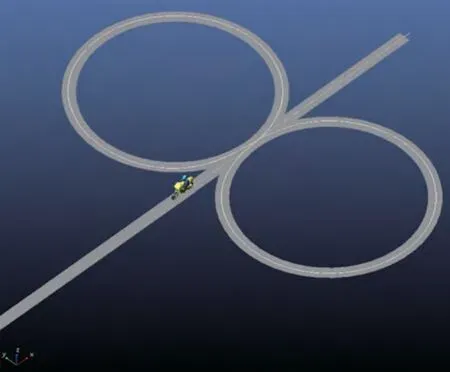
图12 仿真动画

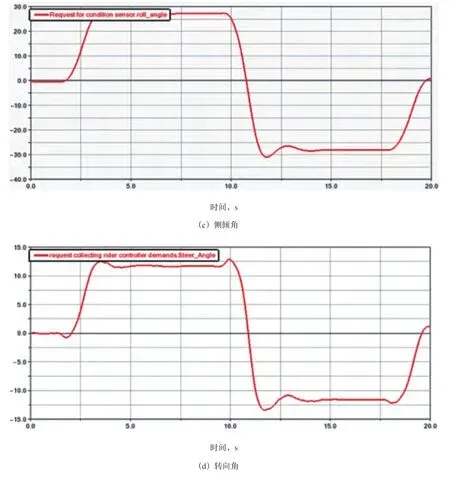
图13 绕八字仿真结果
3 结论分析
摩托车的动态特性可以用操纵性和稳定性等术语来描述。操纵性描述了摩托车执行复杂动作的能力以及驾驶员执行这些动作的难度。另一方面,稳定性意味着摩托车在应对外界干扰(如凹凸不平的路面或阵风)时保持平衡的能力,这取决于车辆的固有特性;摩托车的惯性特性、前进速度、转向头的几何特性和轮胎特性等。
通过仿真得出如下结论:
a)通过三维扫描技术,获得了某国产400mL 大排量摩托车的参数,利用VI-motorcycle 软件建立人—机—路摩托车动力学模型。
b)通过定圆转向、直线加速和绕八字三种工况的仿真,并对结果进行了分析,摩托车在低速时稳定性比较好,在直线加速换挡时,受到波动比较大,垂向和横向性能较差。对后续的摩托车操纵稳定性研究具有一定指导意义。
(全文完)
猜你喜欢
意林(2023年18期)2023-11-05 10:45:10
小天使·一年级语数英综合(2021年3期)2021-05-08 06:10:31
今日农业(2019年12期)2019-08-13 00:50:14
文学少年(原创儿童文学)(2019年1期)2019-05-23 09:37:26
中国化肥信息(2019年3期)2019-04-25 01:56:16
中国生殖健康(2019年7期)2019-01-06 09:27:48
小学生学习指导(爆笑校园)(2018年5期)2018-09-10 02:47:32
环境保护与循环经济(2017年2期)2017-09-26 11:52:16
智慧少年(2016年2期)2016-06-24 06:12:54
中国火炬(2012年3期)2012-07-25 10:34:09
