智能化滚珠丝杠副退化状态的评估方法
2022-08-25 03:03:54张江泉高宏力向守兵谭咏文
西南交通大学学报 2022年4期
张江泉 ,高宏力 ,向守兵 ,郭 亮 ,2,谭咏文
(1.西南交通大学机械工程学院,四川 成都 610031;2.国防科技大学装备综合保障技术重点实验室,湖南 长沙410073)
滚珠丝杠副是数控机床等高端制造装备的核心部件之一,主要负责将电机旋转运动转变为平台上的线性运动,或是将线性运动转化为旋转运动,具有低摩擦损失和高传动效率等特点.在滚珠丝杠副服役过程中,由于其长期工作于高频率、高负荷的复杂工况之下,滚珠和滚道表面受到持续的冲击,丝杠无可避免地发生性能退化直到失效[1-3].由于滚珠丝杠副的定位精度对数控机床等制造装备的加工精度有着直接影响,对滚珠丝杠副进行退化状态评估和监测,对于提升数控机床等高端制造装备运行可靠性、降低设备运维成本具有重要意义.
现有滚珠丝杠副退化状态评估方法主要包括机器学习算法和深度学习算法[4]:1) 机器学习算法是一类比较传统的智能化状态识别方法,经典方法包括贝叶斯算法[5]、支持向量机[6]、K近邻法等[7].该类方法不需要对设备的物理实体和动力学特性进行建模(建立传感器信号和特征之间的隐射关系).但机器学习算法较为依赖信号处理和特征提取水平,自适应化和智能化水平较低,难以应对复杂情况下的状态评估问题[8].2) 随着信息化技术的发展,深度学习算法克服了传统机器学习算法的不足,通过构造更复杂的网络结构,增强网络的特征学习和表征能力[9-10].现有深度学习算法主要包括深度置信网络[11]、循环神经网络[12]、堆栈自编码网络[13]、卷积神经网络[14]等经典网络结构,能够有效地从大量数据中挖掘关键信息,在智能化状态评估领域取得了广泛的应用.
上述方法通常根据已有的充足且带标签的数据集,利用智能化状态评估技术和模型建立传感器信号和滚珠丝杠副状态之间的函数隐射关系.但在实际工程应用中,受制于故障所引发的严重后果、获取标签的成本过高、复杂多变的运行工况环境等实际因素,通常难以在特定工况下获得大量带标签数据集,制约了现有智能化状态评估方法在滚珠丝杠副中的应用.针对以上问题,学者们开展了一系列研究,取得了较为成功的应用成果:Li等[15]考虑复杂工况下采集的机械故障监测数据特征具有不匹配性,提出了一种集成学习和多重深度迁移学习的故障诊断方法,提升模型对跨域不变特征的学习能力;Azamfar等[16]利用特征分布自适应模块对复杂工况下的差异性特征进行适配,可有效地应对复杂工况下的滚珠丝杠副状态评估任务;Zhu等[17]提出结合特征间的余弦相似性和Wasserstein距离,在滚珠丝杠副故障诊断中达到了较高的识别准确率,进一步推动了智能化状态评估研究的发展.
深度域对抗学习(DAT)是一种是近年出现的深度迁移学习方法[18],通过利用带标签源域实现对无标签条件下的目标域数据的特征学习和提取,完成域不变特征的知识迁移[19].在训练过程中,DAT以动态对抗的方式减小域判别器所学到的源域和目标域之间的特征分布差异,使得判别器无法识别特征来源于源域还是目标域,确保模型将特征隐射到跨域共享特征子空间[20].基于DAT的智能化图像识别和故障诊断方法近年来被广泛应用,但滚珠丝杠副退化状态评估智能化状态评估方法相关的研究较少,亟须进一步探索.
本文针对滚珠丝杠副状态评估应用中的复杂工况和标签缺失等应用难点,通过分析滚珠丝杠副振动信号的特点,在现有智能化状态评估方法进行研究和改进,提出一种基于多尺度域对抗学习的智能化状态评估方法.该方法采用多尺度深度卷积神经网络作为自适应特征提取器,进而对多尺度特征进行融合学习,最终利用域对抗学习模块减少训练数据和测试数据之间的特征分布差异.所提方法在复杂工况下的滚珠丝杠副退化状态识别任务中取得了较好的识别效果,同时放宽了模型对标签的要求.本文分别从深度域对抗学习原理、所提方法框架和试验结果3个方面进行介绍.
1 深度域对抗学习原理
深度域对抗学习[21]受启发于生成对抗网络(GAN)[22],将源域和目标域分别看作输入的真实样本和生成器生成的虚假样本,从而进行对抗训练学习.DAT通过域分类器预测样本的域标签,同时计算预测标签和真实域标签之间的二元分类损失.深度域对抗学习的流程如图1所示.图中:MACNN 1~5为多尺度注意力卷积神经网络模块;GAP为全局平均层;FO为特征输出层.当训练完成时,模型难以分辨特征是来自于训练集还是测试集,此时可认为模型已经学习到了跨域不变的关键特征.

图1 深度域对抗模型流程Fig.1 Flowchart of deep adversarial training model
DAT及其相关算法在图像识别、人脸识别和故障诊断等领域取得了广泛的应用[15].在实际应用中,DAT通常以深度模型作为特征提取器,从而自适应地提取关键特征.使用过程中存在的问题主要包括:DAT中深度学习模型着重于提取某一尺度的特征,缺乏刻画多尺度下的目标特征的能力; DAT通常将源域和目标域中学习到的特征进行对抗训练,当特征量较大时,模型缺乏对关键特征的关注,导致模型泛化能力降低.
针对以上问题,本文提出了基于多尺度域对抗学习框架,以具有多尺度特征学习能力的深度卷积神经网络为基础,结合跨域混合训练方法增强模型在复杂工况下的特征学习能力和跨域泛化能力.
2 多尺度域对抗学习框架
本文所提的多尺度域对抗学习框架主要包括多尺度注意力卷积神经网络模块(MACNN)和域对抗模块.其中,MACNN借鉴多尺度学习[23]的思想,利用不同尺度的卷积核对输入特征进行学习,提升网络的自适应能力.应对多卷积带来的参数数量增长和特征冗余问题,MACNN引入神经网络注意力机制,对特征重要性进行建模和加权,提升模型在多尺度条件下特征提取的有效性.为了进一步提升网络对复杂工况下的故障识别能力,所提多尺度域对抗学习框架采用域对抗模块,通过对所学的多尺度特征进行对抗训练,动态地减少源域和目标域数据之间的分布差异,从而提高模型的泛化能力,提升模型对滚珠丝杠副退化状态的识别准确率.
2.1 MACNN模块
MACNN模块的核心思想是利用多个不同尺度的卷积核去学习原始信号中的短期和长期特征,从而提升模型对复杂多尺度特征的刻画能力.MACNN采用多组并行的卷积神经网络分支,通过调整不同分支所用的卷积核大小,利用多个卷积层学习不同时间尺度的特征,并将多组特征拼接起来作为最终的特征输出.滚珠丝杠副振动信号具有变化快和周期性强等特点(包括冲击峰值等短时冲击特征以及振荡周期等长时周期特征),利用多尺度特征提取网络能够有效增强网络对不同尺度下的特征建模能力.
图2展示了单个MACNN模块的基本结构.图中:SECNN为带有网络注意力机制的卷积神经网络模块.由图可知,输入特征x被送往多组并行卷积网络之中进行特征提取,每个网络分支分别包含不同大小的卷积核、归一化层(BN层)、激活层(ReLU)以及防止过拟合的Dropout层.考虑到多组网络参数带来的参数增长,模型更容易出现特征冗余,从而降低了特征学习的有效性.因此,在对多组特征进行拼接之后,在网络中引入注意力机制,对多尺度特征进行显式评分和重构,抑制无关特征带来的干扰信息.

图2 MACNN模块示意Fig.2 Structure of the MACNN module
在神经网络中引入注意力能够对网络学习特征的重要性进行评估,并以此度量模型所学特征的重要性.以卷积神经网络为例,每一层神经网络的卷积核只能学习到局部感受野上的信息,而所有卷积核局部特征的叠加构成了数据信号的全局描述.对于不同的卷积核通道,其关注的区域也不相同,因此特征的重要性也不尽相同.带注意力机制卷积神经网络的实现流程如图3所示.图中:H、W和C分别为特征的高度、宽度和通道维数.

图3 带注意力机制的CNN网络Fig.3 CNN networks with attention mechanisms
Hu等[24]提出了一种基于压缩和重构卷积核通道间重要性的深度学习注意力模块(SENet),通过显式地计算特征通道之间的关系,提升对当前任务有效特征并抑制无效特征.SENet主要包括特征压缩模块和特征重构模块.SENet可采用全局均值化层(GAP)来实现特征压缩过程,从而将特征图中的关键信息以低维方式储存.随后,可利用叠加的全连接层学习不同特征之间的非线性关系,为重要的特征赋予更高的权重.SENet的具体流程如图4所示.

图4 SENet的具体实现流程Fig.4 Implementation details of the SENet network
尺度为H×L×C的特征图谱,其特征压缩过程的数学描述为

式中:uc为输入特征U在第c个通道的特征分量;Zc为压缩完成后的特征.
SENet的特征重构过程可通过多个全连接层进行实现,其数学表达式为

式 中 : δReLU和 σSigmoid分 别 为 所 选 用 的 ReLU和Sigmoid函数;W1和W2分别为两个全连接层;s为输出特征.
选定中间过程的特征降维率为r,W1接受的特征输入尺寸可写作 ( 1×1×C) ,其输出特征尺寸为而W2的输入和输出尺寸和W1相反,分别为
2.2 多尺度域对抗学习框架
基于2.1节中所提的MACNN模块,本节提出一种基于多尺度域对抗学习的深度学习框架,如图5所示.
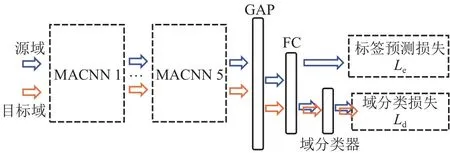
图5 多尺度域对抗学习框架Fig.5 Structure of multi-scale adversarial domain adversarial learning
在所提多尺度域对抗框架中,MACNN模块卷积神经网络模块的具体参数设置如表1所示.其中,每个卷积网络模块包括3个不同大小的卷积核,对特征进行分别卷积运算并最终将所学的多尺度特征进行拼接,作为下一个卷积网络模块的输入.在经过多层MACNN层运算之后,输出特征被送入GAP层进行特征降维,以减少模型所需的参数量.最终,特征通过全连接层(FC)将特征输出为所需维度,并用于预测数据标签以及计算模型的损失函数.
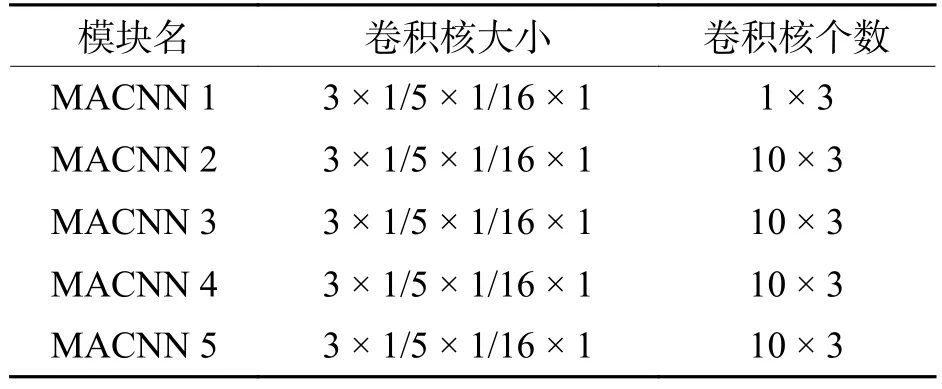
表1 MACNN模块基础参数Tab.1 Basic parameters of the MACNN modules
所提多尺度域对抗学习网络模型需要首先实现对源域数据的精准识别,其次需能够高效地减少源域数据和目标域数据之间的特征分布差异.因此,所提模型的损失函数主要包含模型在源域中的标签预测损失以及源域和目标域之间的域分类损失.源域中的标签预测损失可写作交叉熵形式,如式(3).

式中:xi和xk为 计算交叉熵损失所用的特征;yi为 特征xi所对用的样本标签;I为0-1变量,yi=c取 1,yi≠c取 0.
此外,网络还需通过域对抗模块实现数据之间的特征差异最小化,从而保证在源域学到的知识能有效地应用于目标域的任务.域对抗模块的优化损失为

式中:Gd为 域判别器,负责对网络学习到的特征归属进行判断,其参数为 θd;Xi为模型最终输出特征;Ds和Dt分别为带标签源域和无标签目标域;yc为标签为c的样本.
综合式(3)和式(4),最终的模型损失函数为

式中: λ 为权衡各部分损失函数的超参数,随着网络更新而逐渐降低, λ =0.6/(1.0+0.15i)0.5; θf为特征提取模型的参数空间;Cy为 模型的真实标签集.
网络更新学习率l=0.01/(1.0+0.15i)0.5.基于式(5),应用反向传播算法和Adam算法来更新整个网络的梯度和权重.
3 实验与结果分析
3.1 滚珠丝杠副全寿命试验
利用滚珠丝杠副加速退化试验台开展滚珠丝杠副加速性能退化试验.试验台机械部分如图6所示,主要由伺服电机、滚珠丝杠副、支撑轴承、工作平台、磁粉制动装置和传动装置等部分组成.试验台工作时:电机负责为系统提供驱动力,从而带动滚珠丝杠副进行旋转运动;丝杠螺母带动与其连接的工作平台做直线往复运动.

图6 滚珠丝杠副加速退化试验台Fig.6 Accelerated degradation test bench for ball screw
在运行过程中,可通过电机和磁粉制动装置调节系统转速和输出扭矩,从而开展多工况条件下的滚珠丝杠副性能退化试验.试验选用的滚珠丝杠副型号为FFZD4010-3,其安装方式为固定-支撑式.所用滚珠丝杠副的具体参数如表2.

表2 所选FFZD4010-3型滚珠丝杠副基础参数Tab.2 Basic parameters of selected FFZD4010-3 ball screw
考虑到滚珠丝杠副的性能退化主要受到轴向载荷和转速等运行工况的影响,因此,设计多工况下的滚珠丝杠副性能退化试验获取滚珠丝杠副全寿命性能退化数据.具体工况设置如表3所示.试验选择间隔采样的数据采集方式,每隔40 min进行一次数据采样,对滚轴丝杠副运行的往返行程进行采样,每次采样时长为60 s,试验所用采样频率为5 kHz.

表3 试验工况详细参数Tab.3 Detailed parameters of test working conditions
滚珠丝杠副的性能退化过程通常包括磨合期、稳定器、快速退化期和退化失效期.基于此性能退化过程,通过对丝杠表面形貌变化以及振动信号进行分析,可将滚珠丝杠副的运行状态大致分化为启动阶段、平稳阶段、退化阶段和快速退化阶段.在以上阶段中,滚珠丝杠副失效的概率逐渐增加,直至出现严重故障.图7为滚珠丝杠副快速退化阶段的振动信号图.该信号采集于安装在螺母座上的加速度传感器,并分别包括3个方向上的信号源.

图7 滚珠丝杠副运行末期信号Fig.7 Signals at the end of the ball screw operation
3.2 实验结果分析
根据对滚珠丝杠副退化过程数据的分析,将滚珠丝杠副退化数据分为4组:前42组数据作为启动阶段;43~120组数据作为平稳阶段;121~183组数据作为退化阶段;184组之后的数据作为快速退化阶段.以上4组数据的标签分别为0、1、2、3.将振动传感器所采集3个方向的振动信号进行整合,构建试验原始数据集,并将其分割为长度为1 200的一维信号,用于模型的训练与测试.
根据带标签工况数据和无标签工况数据的不同,共构建6组迁移状态识别任务,训练任务的详细设置参考表4.试验任务考虑多种工况情况,以任务A为例:工况1代表带标签源域,工况2代表无标签数据集.对于状态识别任务,所有源域数据和70%目标域数据用于模型的训练,剩余目标域数据用于测试模型的识别性能.在所有测试任务中,超参数的取值策略都与所提方法相同.

表4 滚珠丝杠副退化状态识别试验Tab.4 Ball screw degradation state identification test
为了减少随机因素对模型识别结果的影响,将各组状态评估子任务重复进行10次,其最终的平均识别结果如表5.所有任务的超参数、学习率、网络结构等都保持一致,网络初始参数通过随机初始化得到.从表中可知,所提方法在所有任务中都取得了较好的识别准确度.图8进一步详细展示了所提方法在不同任务重复实验中所取得的识别准确率以及其对应的方差,可知所提方法在所有子任务多次重复试验中的方差较小,具有较稳定的识别效果.综合以上结果可知:所提方法能够充分应对复杂工况下的滚珠丝杠副退化状态识别问题,具有较好的应用效果和实际应用前景.

表5 退化状态识别试验结果Tab.5 Results of degradation state identification tests %

图8 滚珠丝杠副退化状态识别子任务结果Fig.8 Results of ball screw degradation state recognition tasks
为了探究所提方法对输入样本数量的敏感程度,选择任务C作为研究对象,对比和分析所提方法在不同样本数量下的退化状态识别能力.在任务C的基础之上,构建包含不同数量带标签工况样本的训练样本数据集,分别包含 100、200、500、1 000、2 000个和3 000个训练数据.
图9汇总了所构建任务的退化状态识别结果.由图9可知:对500个样本及以上的退化识别任务能够取得高于90%的平均退化识别准确率;对于少于500个训练样本的退化识别任务,也能够取得接近85%的平均识别率.因此,所提方法的性能在样本量较少的情况下也能取得较好的识别效果,并且识别效果随着样本数量的增多而增强.

图9 不同样本数量下的退化状态识别结果Fig.9 Results of ball screw degradation state recognition tasks with various samples quantities
3.3 方法对比
为了验证所提方法的优势,将本文所提方法与现有先进算法进行对比与分析.先进算法包括以卷积神经网络为代表的深度模型方法(CNN)、联合概率分布自适应方法(JDAN)[25]和与深度域对抗方法(DANN).将对比方法和本文所提方法应用于滚珠丝杠副退化评估试验任务E,其识别结果如表6所示.由实验结果可知:本文所提方法取得了最优的识别精度,达到了91.84%;CNN方法的识别精度最低,仅为73.57%.在复杂工况条件下,传统深度学习模型无法有效地提取关键特征,从而导致识别性能下降,而本文所提方法结合多尺度特征提取和深度学习注意力机制,进一步提升了模型对于复杂工况下的特征的泛化能力,能够取得更加理想的退化状态识别效果.

表6 所提方法与对比方法的结果比较Tab.6 Comparison between the proposed method and the state-of-the-art methods
为了进一步展示所提方法的有效性,采用t-分布随机邻域(t-SNE)对传统CNN方法和所提方法进行可视化分析.t-SNE技术可将高维特征映射到低维空间,并以散点图的形式直观地展示特征的聚类分布特性.选用最后一层全连接层的输出特征作为可视化对象,其结果如图10.在图10中:S0和T0分别代表源域和目标域数据集中标签为0的高维特征,以此类推.由可视化结果可知:CNN方法所学不同工况特征的聚合效果较差,网络未能在复杂工况条件下有效地提取关键特征;所提方法学习到的特征被清楚地分为4组,且同一退化状态的特征之间的匹配程度较高,不同退化状态的特征则相互分离,此时模型能够识别出不同类特征之间的差异性,从而实现高准确率的退化状态评估.

图10 t-SNE特征可视化结果Fig.10 Feature visualization results via t-SNE
4 结 论
1) 提出了基于多尺度注意力卷积神经网络模块,利用不同尺度的卷积核对输入特征进行学习,同时引入神经网络注意力机制,对特征重要性进行建模和加权,应对多卷积带来的参数量增长和特征冗余问题,提升模型在多尺度条件下的特征提取的有效性.
2) 提出了多尺度域对抗学习框架,并将其应用于其应用在复杂工况下的滚珠丝杠副退化状态识别任务之中.利用域对抗模块对跨域特征之间的差异性进行建模,确保模型能够有效地学习具有相似特征分布的子空间,从而应对滚珠丝杠副状态评估应用中的复杂工况和标签缺失的应用难点.
3) 本文方法可以针对不同工况下的滚珠丝杠副退化信号进行高效的特征提取和状态识别,并且对训练样本数量不敏感,能够在较少样本条件下自
猜你喜欢
内蒙古民族大学学报(社会科学版)(2020年2期)2020-11-06 09:08:52
制造技术与机床(2019年11期)2019-12-04 05:50:26
太空探索(2016年5期)2016-07-12 15:17:55
深圳职业技术学院学报(2015年5期)2015-11-30 06:22:25
时代英语·高三(2014年5期)2014-08-26 17:01:17
机械制造与自动化(2014年1期)2014-03-01 04:21:45
机械与电子(2014年3期)2014-02-28 02:07:57
雕塑(2000年2期)2000-06-22 16:13:30