
高超声速飞行器LPV 鲁棒变增益控制
2022-08-25 10:46郑总准
导弹与航天运载技术 2022年4期
郑总准,钟 声,马 爽
(北京航天自动控制研究所,北京,100854)
0 引 言
高超声速飞行器为实现长距离滑翔,飞行器多采用面对称布局的高升阻比外形,且飞行空域大,速度变化大,临近空间飞行环境未知,同时高速飞行时表层的烧蚀和脱落也会带来飞行器特性的改变,这些因素使得飞行器成为强耦合、快时变、非线性和不确定的复杂对象,给飞行器姿态控制设计带来了很大的困难和挑战。
现有的非线性控制系统设计方法理论分析上有其独特的优点但却不适于工程实现。传统的工程设计通过成熟的线性化方法,将线性系统的控制方法拓展到非线性系统中来,但高超声速飞行器在飞行过程中高度、速度、攻角、动压随着飞行轨迹发生剧烈变化,系统状态距离线性化的平衡点较远,系统参数变化较快,外界扰动强,因此传统的工程方法存在明显的缺陷。线性参数变化系统(Linear Parameter-Varying,LPV)理论的出现弥补了传统控制的不足。
LPV 系统本质上是非线性系统的一种近似方法,它最先由Shamma 等于1988 年提出。随后,由于鲁棒控制理论的进一步发展,LMI 矩阵不等式求解工具箱的出现以及最优控制和预测控制理论及神经网络理论的进一步完善,LPV 系统的稳定性、鲁棒性能及控制器的设计有了新的发展。Salman 等将LPV 方法应用到了一类飞行器控制器设计中,并基于线性矩阵不等式理论和依赖参数的李雅普诺夫函数方法进行控制器参数设计。Lim 则是将一种广义的LPV 控制方法应用到导弹的自动导航系统中,利用LPV 系统的控制方法和非光滑LPV 系统技术设计控制器,获得了理想的控制效果。Zarei 对多变量短距离飞机垂直起降系统设计了LQG/LTR 控制器和混合灵敏度控制器,并比较了它们之间的优缺点。Roche 研究了LPV 方法在机器人控制系统上的应用,提出了基于LPV 的控制器设计。Polat 将LPV 控制方法应用到拖拉机拖车行驶稳定性的控制上,Jung 等分别对柴油机的增压系统和通风系统建立了LPV 控制系统并利用LPV控制方法设计了控制器。
虽然LPV 控制理论及其应用研究已经很多,但是针对的对象都是要求参数能精确测量且无建模误差的系统,对参数测量存在误差和非线性系统转化成LPV系统过程中存在建模误差的模型的研究涉及甚少。本文提出了一种适用于高超声速飞行器的参数不确定性LPV 系统建模方法,基于LPV 理论考虑参数的不确定性,描述飞行器系统内在的非线性和时变特性,进而,通过求解一个线性正矩阵不等式的凸优化问题,设计了具有自调节法则的鲁棒变增益控制律。
1 高超声速飞行器LPV 系统建模
1.1 动力学模型


1.2 模型线性化


1.3 参数不确定的LPV 系统模型

1.3.1 系统建模误差处理
当前,随着经济的快速发展,人们的物质生活水平在不断改善和提高,对建筑的需求也就越来越多。随着建筑工程的不断增多,一些地区不断被开发,但是众多建筑物的建设也给地基带来了严重的压力,极易导致地基基础下沉的状况,其中,陕西地区由于其独特的地质构造和土质类型,相较于其他地区更容易发生地基沉降的现象,本文主要对发生地基基础下沉现象的原因进行分析,希望能够从中发现一些对应的策略,改善我国的整体状况,促进建筑行业的不断发展,推进建筑行业的现代化进程。

1.3.2 LPV 参数测量误差处理
2 基于LPV 系统的变增益控制器设计
对于LPV 系统(7),令为可测量输出,则LPV系统可进一步写成:

2.1 求解线性矩阵不等式得到矩阵X 和Y

2.2 求解矩阵依次得到CK1,ΒK1,AK1



3 仿真分析
基于上述LPV 模型,可设计鲁棒变增益控制器,仿真结果如下。额定状态下的仿真结果如图1~3 所示。
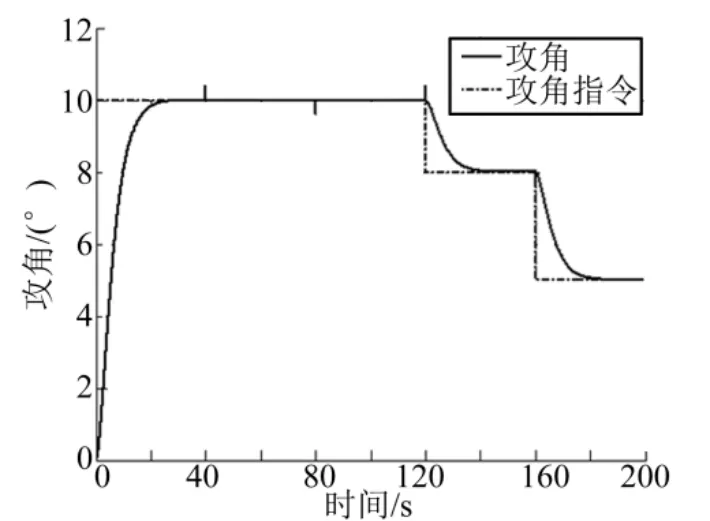
图1 攻角与攻角指令曲线Fig.1 Curves of Angle of Attack (AOA) and AOA Command
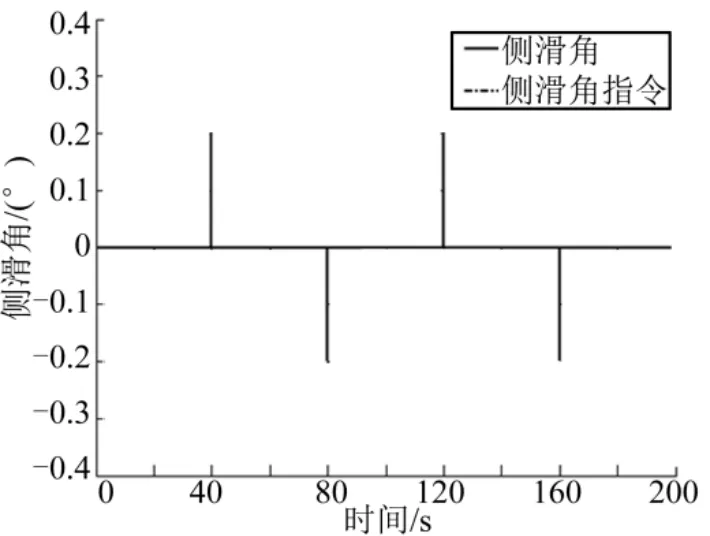
图2 侧滑角与侧滑角指令曲线Fig.2 Curves of Slideslip Angle and Slideslip Angle Command

图3 滚动角与滚动角指令曲线Fig.3 Curves of Roll Angle and Roll Angle Command
从仿真结果可以看出,基于LPV 模型的鲁棒变增益控制器可以在保持闭环系统稳定的同时,实现对指令的跟踪,并且具有足够的精度。拉偏状态下的仿真结果如图4 至图6 所示。由图4 至图6 可以看出,在参数拉偏的情况下,姿态角仍然可以快速平稳地收敛,由此说明LPV 模型的鲁棒变增益控制器具有有较好的鲁棒性。
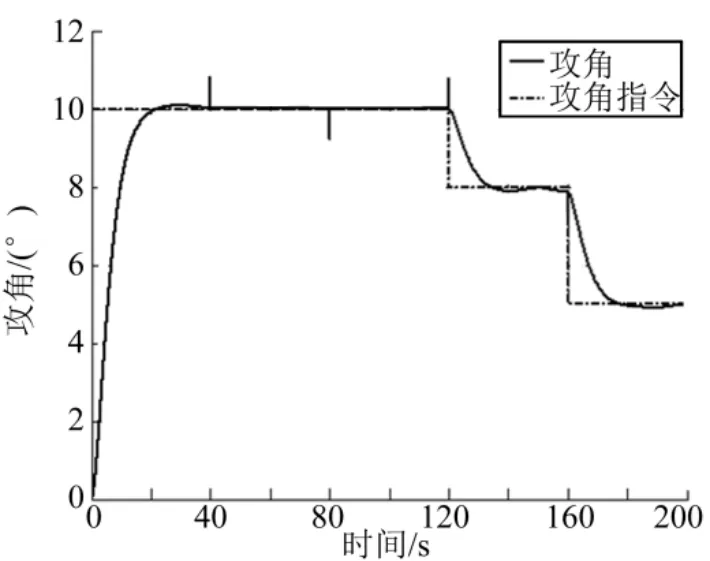
图4 攻角与攻角指令曲线(拉偏)Fig.4 Curves of Angle of Attack (AOA) and AOA Command(deviation)
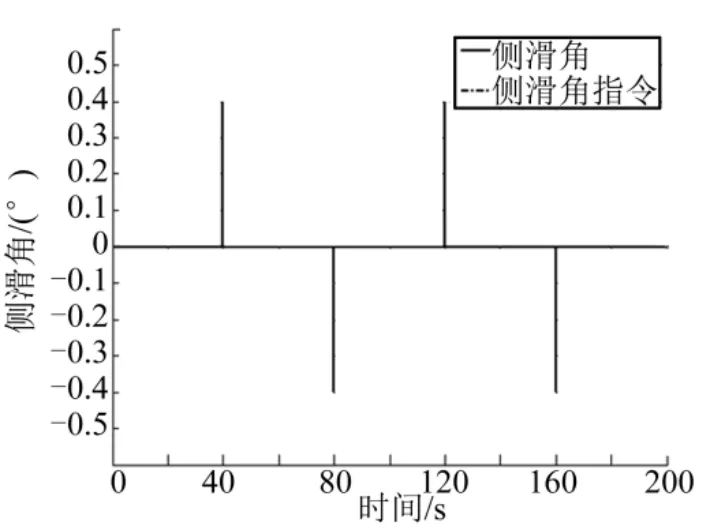
图5 侧滑角与侧滑角指令曲线(拉偏)Fig.5 Curves of Slideslip Angle and Slideslip Angle Command(deviation)

图6 滚动角与滚动角指令曲线(拉偏)Fig.6 Curves of Roll Angle and Roll Angle Command (deviation)
4 结束语
本文针对带有非线性、参数快变、不确定性的高超声速飞行器的姿态控制问题,提出了一种LPV 鲁棒变增益控制方法。首先,建立了参数不确定的LPV 系统模型,进而通过对建模误差和测量误差的分析和有用信息的进一步提取,提高了建模精度;然后,设计了具有自调节法则的鲁棒变增益控制律,使得闭环系统稳定的同时,具有良好的动态性能和稳态性能;最后,通过仿真验证了设计的LPV 鲁棒变增益控制方法的有效性和鲁棒性。
