
基于模型预测控制算法的NPC三电平逆变器
2022-08-24 06:13钱金跃杨玉锐吴伟健陆佳晨李德猛
农村电气化 2022年8期
钱金跃,杨玉锐,姚 强,崔 寅,陶 琨,吴伟健,陆佳晨,缪 薇,李德猛
(国网浙江省电力有限公司平湖市供电公司,浙江 平湖 314200)
二极管箝位型(Neutral point clamped,NPC)三电平逆变器以其低谐波输出、低开关损耗、低器件耐压水平等优点,被广泛应用于大功率并网控制系统、电力传动系统[1]。但是NPC 型三电平逆变器存在固有缺点,当中点电位平衡,同一桥臂上下两个开关管仅承受一半的直流电压;当中点电位不平衡,同一桥臂上下两个开关管分别承受不同电压,将降低开关管使用寿命,甚至烧毁开关管,并增加交流侧输出电压的谐波含量。因此,如何有效控制中点电位平衡一直是学术界研究热点。
软件控制和硬件改造是控制NPC型三电平逆变器中点电位平衡的两种方法。文献[2]研究了合理分配冗余小矢量控制中点电流流向以实现中点电位平衡,但计算相对复杂,执行时间较长。文献[3]通过额外增加桥臂的硬件方法控制中点电位,但是成本昂贵、占地面积大。文献[4]采用的算法虽然减少计算量,但是器件具有较高的开关频率,忽视了开关损耗。
应用于驱动领域的NPC三电平逆变器较为突出问题为高频共模电压(common-modevoltage,CMV),其在电动机转轴上感应高振幅轴电压并产生轴电流,破坏绝缘、腐蚀电机、缩短寿命[5]。此外,高频漏电流(高频CMV产生)会产生电磁干扰,影响设备正常运行[6]。
综合考虑成本和体积因素,软件控制是首选。近年来,模型预测控制(model predictive control,MPC)被广泛应用于现代电力电子领域[7],其响应速度快,适用于多变量和非线性系统,在许多领域都被证明其优于传统方法。其在NPC型三电平逆变器中点电位的不平衡控制中,主要以离散化系统数学模型为基础,根据历史输出预测未来输出,并结合目标函数滚动筛选最优开关状态的控制算法。
本文提出一种综合考虑中点电位、开关频率和共模电压的模型预测控制算法。首先,建立NPC三电平逆变器的负载电流、中点电位离散化数学预测模型。然后,基于MPC 适用于多变量和非线性系统,构建中点电位、开关频率、CMV的多约束目标函数,滚动筛选最优矢量作用NPC 三电平逆变器,降低共模电压且减少运行时间。最后,在MATLAB/SIMULINK 平台搭建NPC 三电平逆变器仿真模型,并对算法的运行性能进行验证。
1 NPC三电平逆变器
1.1 工作原理
RL负载的NPC三电平逆变器拓扑结构如图1所示,其中每个桥臂包含四个IGBT开关器件和两个箝位二极管。直流侧两个电容中点(记作“O”点)连接两个箝位二极管的中点,其中“O”点为零电位参考点。
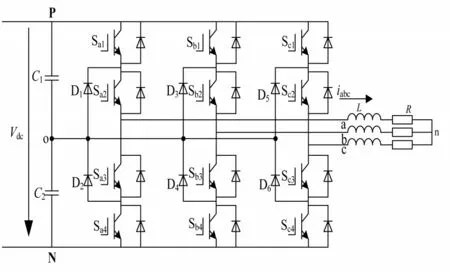
图1 NPC三电平逆变器拓扑结构
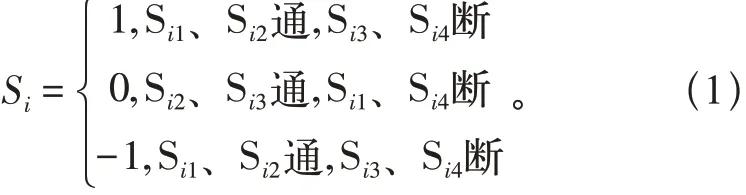
由图1 可知,每相桥臂的开关Sa1和Sa3(Sa2和Sa4)不能同时导通,因此每相桥臂只有三种开关状态,即P、O、N 状态。假设用{1,0,-1}表示上述状态,输出电压用vao表示,“1”代表vao为Vdc/2,“0”代表vao为0,“-1”代表vao为-Vdc/2。定义开关函数如式(1)所示:
式中:i=a,b,c。
为了简述表达每相的三个工作状态与vao的关系,上述分析如表1所示。
表1 每相工作状态与输出电压vao
1.2 数学模型
由图1可知,直流侧两个电容中点“O”为零电位参考点,因此αβ坐标系下的三相输出电压为:

式中:α=ej2π/3;uα,β=uα+ juβ,uα和uβ是αβ坐标系下uα,β的实部与虚部;uan、ubn、ucn是abc 坐标系下三相输出电压,且∈{Vdc/2,0,-Vdc/2}。
同理,αβ坐标系下的三相负载电流为:

式中:α=ej2π/3;iα,β=iα+ jiβ,iα和iβ是αβ坐标系下iα,β的实部与虚部;iα、ib、ic是abc 坐标系下三相负载电流。
因此,连续时域下的NPC型三电平逆变器数学模型为:

式中:R为负载电阻;L为负载电感。
在一个采样周期Ts内,采用一阶欧拉公式(式(6)离散化式(5),可得第(k+ 1)时刻的预测电流,如式(7)所示。
式中:上标“p”为预测值;k为第k个采样周期;iα,β(k)为第k次采样电流。
2 中点电位不平衡及开关频率
2.1 不平衡分析
不对称的三相负载、不同的电容参数、不同空间电压矢量作用下不对称的流出和流入电流都会导致直流侧上下两个分压电容的不平衡。相关文献详细分析了零矢量、小矢量、中矢量和大矢量对中点电位不平衡的影响,并得出结论:中点电位波动的本质是由于小矢量或中矢量作用下产生中点电流io,且io与ia、ib、ic的关系为:

由1.1节可知,中点“O”为零电位参考点,故uo为零电位点。直流侧上下两个分压电容流过的电流方向及中点电流的流向如图4所示,i1表示流过上分压电容电流,i2表示流过下分压电容电流,io表示中点电流,以图中所标方向为正方向。
图2不平衡分析
假设C1=C2=C,则C1承受的电压为vdc1,C2承受的电压为vdc2,则i1和i2可表示为:

在零电位参考点“O”处应用基尔霍夫电流定律,故io可表示为:

将式(7)代入式(10),并应用式(6)离散化,可得:

其中:uo(k)是第k时刻零电位值。
因此,根据式(11)可预测第(k+ 1)时刻的零电位值。
2.2 开关频率分析
降低开关频率通过选择第k- 1时刻和第k时刻开关状态变换最少的空间电压矢量,减少器件频繁投切的次数,延长器件使用寿命。定义从第k- 1时刻到第k时刻的一个周期内开关切换次数为开关频率,可表示为:

其中:Sj(k)(j= a,b,c)表示第k时刻的开关状态,Sj(k-1)表示第(k-1)时刻的开关状态。
2.3 共模电压分析
由表1可知,输出相电压可由开关函数表示为
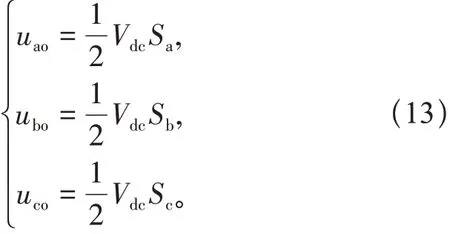
在图1 中,定义“n”和“o”之间的电位差为共模电压(ucom),理想情况下,三相负载电流ia+ib+ic=0,根据基尔霍夫电压定律可将ucom可表示为

将式(13)代入式(14),ucom可表示为

由式(15)可知,ucom由开关状态决定,每个开关状态对应的ucom如表2所示。
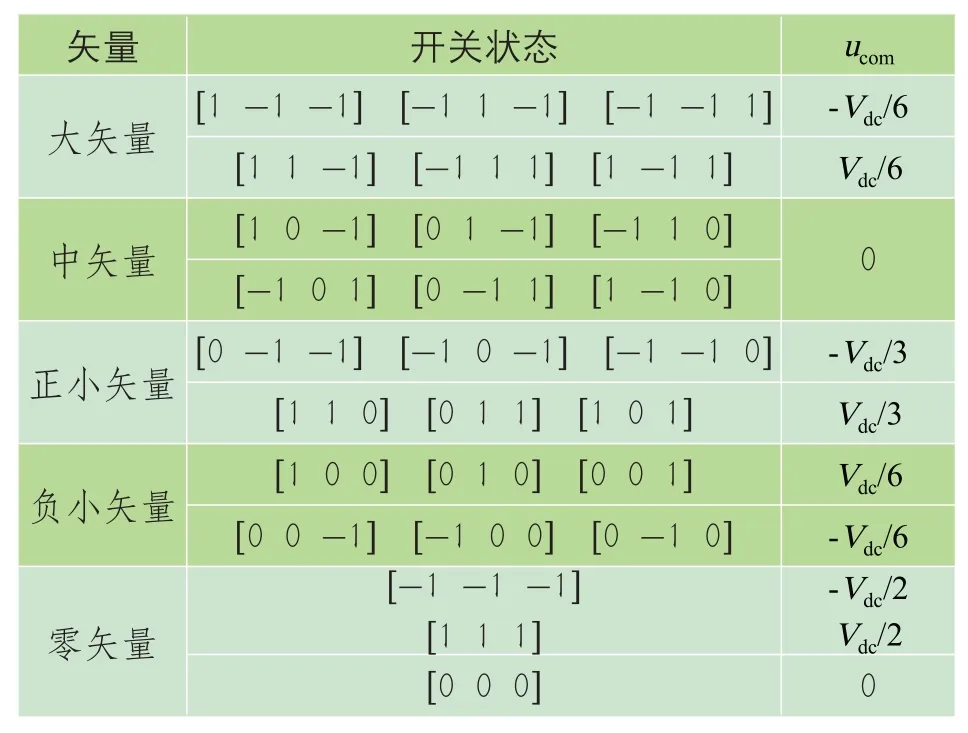
表2 开关状态和共模电压之间的关系
由表2 可知,27 个开关状态共对应7 个不同的ucom,最小值为0,最大值为|Vdc/2|。
3 模型预测控制
3.1 目标函数
MPC算法的灵活性和适用性主要表现为可将多个控制目标、控制变量及约束条件整合在一个目标函数,但是不同的控制目标存在不同的数量级或者优先级,因此需要在目标函数中引入权重因子λ,本文定义中点电位,开关频率以及共模电压的权重因子分别为λ1、λ2和λ3。对于NPC型三电平逆变器,保证中点电平是其正常运行的关键,故λ1≠0,考虑控制优先级顺序(依次为中点电位控制、CMV限制、开关频率),故设置λ1>λ2=λ3>0。
综合上述分析,本文定义目标函数为:

3.2 控制策略
图3为NPC 型三电平逆变器模型预测控制算法结构框图。
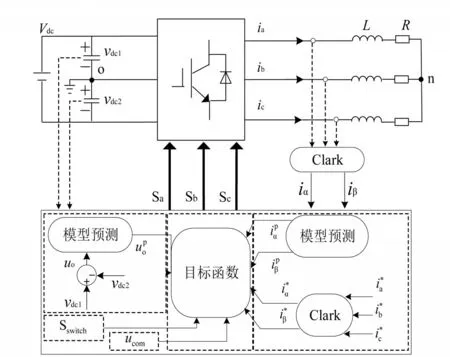
图3 MPC算法结构框图
4 仿真验证
在分析上述工作原理、数学模型、中点电位不平衡、开关频率和共模电压的基础上,结合模型预测控制策略,在MATLAB/SIMULINK 平台搭建基于模型预测控制算法的NPC 三电平逆变器仿真模型,并对算法的运行性能进行验证。仿真参数如表3所示。
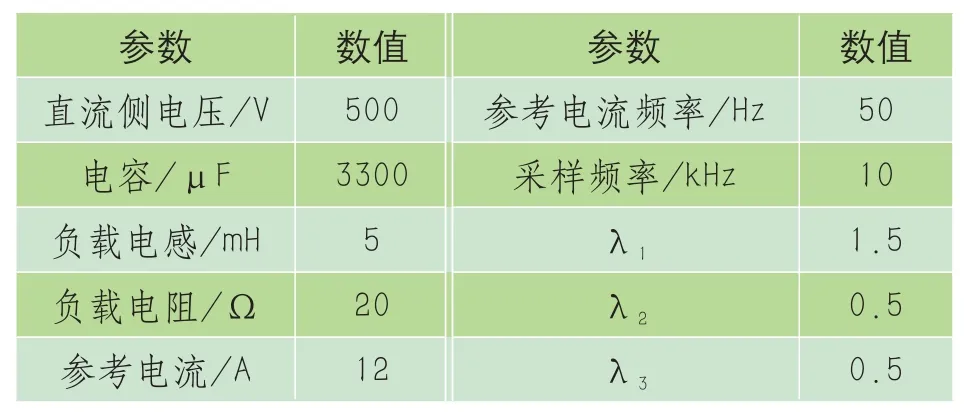
表3 主要参数
基于模型预测控制算法的稳态线电压和中点电位如图4所示,从图中可以看出中点电位稳定在0~5 V。

图4 稳态线电压和中点电位波形图
基于模型预测控制算法的共模电压如图5所示,从图中可以看出该算法限制共模电压幅值范围为|Vdc/6|,且负载电流能快速跟踪参考电流。
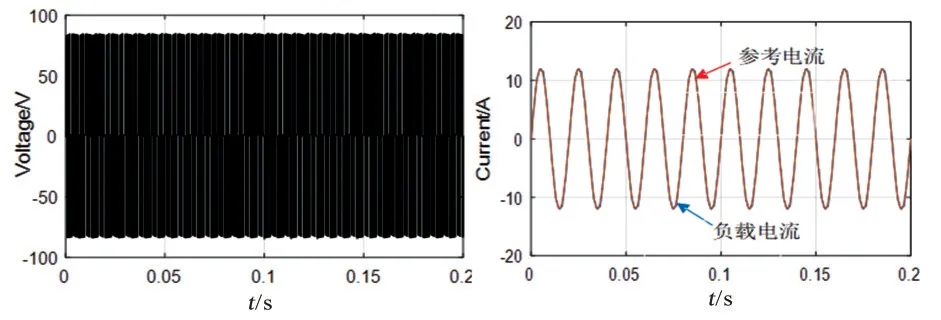
图5 共模电压、负载电流与参考电流的对比图
表4对比SVPWM 与MPC 的运行时间。相比SVPWM,MPC 单个周期的运行时间明显下降,大概节约33%。相同硬件条件下,相比SVPWM,MPC运行效率更高。
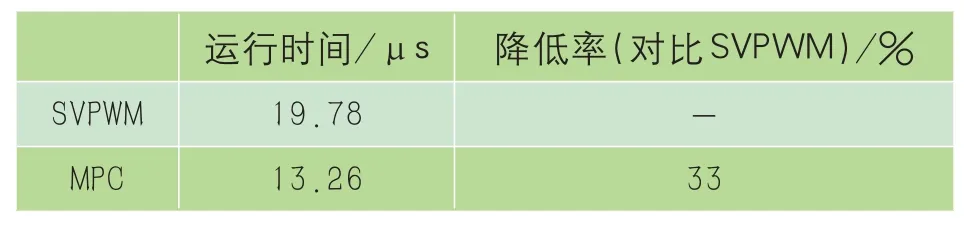
表4 运行时间对比
5 结束语
本文提出一种综合考虑中点电位、开关频率和共模电压的模型预测控制算法。在NPC三电平逆变器的负载电流、中点电位离散化数学预测模型的基础上构建中点电位、开关频率、CMV的多约束目标函数,滚动筛选最优矢量作用NPC 三电平逆变器,实现降低共模电压,并减少运行时间。
猜你喜欢
选煤技术(2022年2期)2022-06-06
电源学报(2022年1期)2022-02-25
铁道机车车辆(2021年3期)2021-07-12
湖北工业大学学报(2021年2期)2021-04-28
科学家(2021年24期)2021-04-25
地震研究(2021年1期)2021-04-13
安徽科技(2021年3期)2021-04-06
日用电器(2020年9期)2020-10-15
北京航空航天大学学报(2017年1期)2017-11-24
电子制作(2017年10期)2017-04-18
