高分辨率城市级实景三维地理场景高效构建技术与应用
2022-08-23 08:29:10朱磊赵慧赵菲杜冲杨金凤
山东国土资源 2022年8期
朱磊,赵慧,赵菲,杜冲,杨金凤
(1.山东省国土测绘院,山东 济南 250102;2.山东省地质科学研究院,山东 济南 250013;3.山东省国土空间生态修复中心,山东 济南 250014)
0 引言
实景三维作为真实、立体、时序化反映人类生产、生活和生态空间的时空信息,是国家重要的新型基础设施。通过“人机兼容、物联感知、泛在服务”实现数字空间与现实空间的实时关联互通,为数字中国提供统一的空间定位框架和分析基础,是数字政府、数字经济重要的战略性数据资源和生产要素。倾斜摄影三维模型具有信息丰富、效果直观真实等优点,是城市级实景三维地理场景的主要表达方式。
受制于像点位移、影像存储速度、安全飞行高度等因素制约,优于0.03m分辨率倾斜摄影一般采用无人机搭载轻小型倾斜相机[1-4]或者直升飞机搭载倾斜航摄仪获取[5-7]。两种作业方式均存在速度慢、影像飞行质量容易超限等问题,影响航摄效率和建模效果。
本文以智慧城市时空大数据平台省级试点沾化倾斜摄影项目为例,提出一种采用高速固定翼飞机搭载多镜头倾斜航摄仪高效获取0.03m分辨率多视影像,并采用全自动建模技术制作倾斜摄影三维模型的技术方案,为高分辨率城市级实景三维地理场景建设提供借鉴。
1 SWDC-Max6Ap150数字倾斜航摄仪
1.1 航摄仪简介
SWDC-Max6Ap150数字倾斜航摄仪集测量型相机、定姿定位系统、陀螺稳定平台、数据存储计算机、航摄管理计算机等设备于一体,配备2个下视镜头和4个侧视镜头,可同时获取下视和侧视影像数据。子相机iXM-RS150F是一款中画幅工业相机,采用背照式CMOS传感器,拥有53.4mm×40mm画幅尺寸和83dB动态范围,即使在低光照条件下,也依然能够提供超高图像质量,分辨率高达14204×10652;配备的RS镜头快门集成于镜头中,采用创新型电荷直接驱动理念,提升了曝光速度,最高可达l/2500s。
航摄仪集成的定姿定位系统POSDO-AF01是一款结构紧凑、一体化设计的GNSS+INS组合导航系统,内置OEM板卡、光纤陀螺和石英加速度计,后处理位置精度优于2cm,水平精度优于0.005°,航向精度优于0.008°,大大提高了系统的可靠性、精确性与动态性。航摄仪集成GSM4000陀螺座驾,配有电动升降台装置,拓宽了航空摄影仪对飞行平台的适应性。
1.2 外视场拼接
1.5亿像素中画幅传感器引入航摄领域之后,极大的提升了航摄效率,但受制于技术瓶颈制约,更大幅面相机近年内难以出现,相机外视场拼接技术较好的解决了这一问题。原理是利用水平像片上重叠部分的同名点,根据旋转平移关系求解两幅影像的相对方位元素,然后将水平影像同时投影到虚拟影像上,流程如图1。其中“内部相对定向”过程是依据子相机影像重叠范围内同名点坐标相等的原理,等同于相对定向中同名射线对对相交的原理[8-9]。相机外视场拼接技术有效提升了相机幅面,提高了航摄效率。
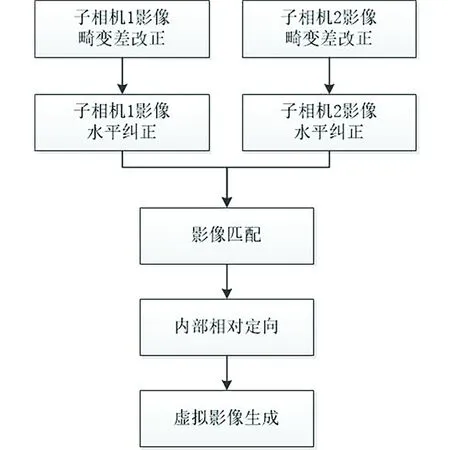
图1 外视场拼接技术流程
SWDC-Max6Ap150下视相机虚拟影像采用两个独立的iXM-RS150F相机影像拼接而成,影像间内部重叠为15%左右,通过外视场拼接技术,下视幅面由14204×10652像元提高到20000×13000像元,比常规5头倾斜相机作业效率提高40%左右。
1.3 航摄仪主要性能参数
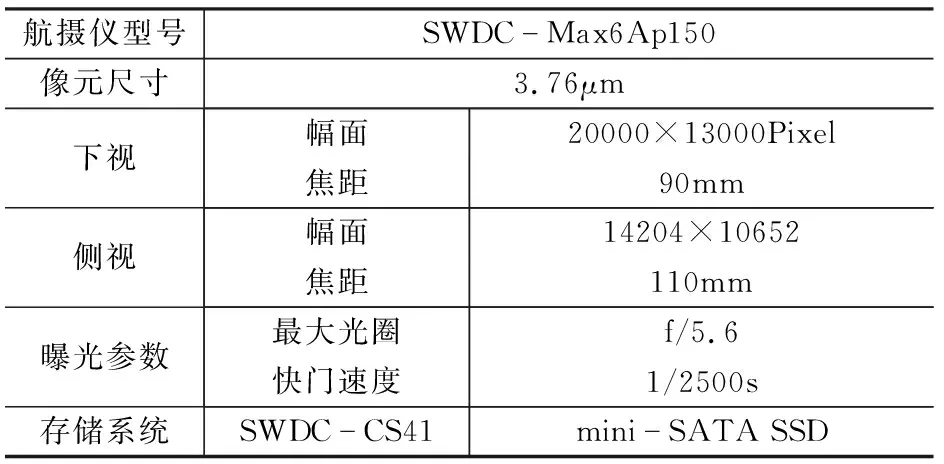
表1 航摄仪主要参数
2 航摄制约因素分析与方案设计
得益于SWDC-Max6Ap150倾斜航摄仪的影像外视场拼接、长焦镜头及快速存储技术,解决了飞行安全高度、像点位移、像片存储速度等因素对高速获取多视影像的制约,使得以高速固定翼飞机为载体获取优于0.03m分辨率倾斜影像成为了现实。
2.1 安全飞行高度
航高由相机下视地面分辨率、镜头焦距、像元尺寸等参数决定,计算公式如下:
式中:H—摄影航高(m);f—镜头焦距(mm);a—像元尺寸(mm);GSD—地面分辨率(m)。
中国民航局相关监管法规规定,“在人口稠密区、集镇或居住区的上空或者任何露天公众集会上空,航空器的高度不得低于在其600m水平半径范围内的最高障碍物以上300m”。当下视地面分辨率为0.03m时,相对航高为718m,大于安全飞行高度。
2.2 像点位移
在航空摄影中,因装载航摄仪的飞机始终处于运动状态,而成像又需时间长度有限的曝光,所以被照物影像与传感器之间存在相对运动,带来成像模糊及拖尾效应,此即像移[10]。GB/T 27920.1-2011《数字航空摄影规范 第1部分:框幅式数字航空摄影》中5.2.3规定,“确保因飞机地速的影响,在曝光瞬间造成的像点位移一般不应大于1个像素,最大不应大于1.5个像素”。
iXM-RS150F子相机无像移补偿模块,当影像地面分辨率设计为0.03m时,按照相机快门速度为1/2500s测算,飞机巡航速度不大于270km/h时,像移不超过1个像素。
2.3 像片存储速度
SWDC-CS41存储系统使用一台存储计算机存储并监控航空影像数据,具有体积小、功耗低、存储容量大、性能稳定等特点。存储介质为mini-SATA接口协议的固态硬盘,读写速度高达500m/s,使得航摄仪最短曝光间隔小于0.9s。
不考虑地形因素影响,航摄基线长度=航摄仪航向幅宽×地面分辨率×(1-航向重叠度)。
按照地面分辨率为0.03m,航向重叠度为75%设计航线时,SWDC-Max6Ap150倾斜航摄仪曝光点间距为97.5m。当飞机巡航速度为270km/h(75m/s)时,曝光间隔为97.5/75=1.3s,大于0.9s的航摄仪最短曝光间隔。
综上,飞机飞行速度小于270km/h,采用SWDC-Max6Ap150获取0.03m分辨倾斜影像,像移小于1个像素,存储速度、飞行高度均满足航摄要求。
3 工程实例
3.1 工程概况
为提升测绘地理信息服务能力和保障水平,促进自然资源管理和治理能力现代化,结合智慧城市建设发展需求,滨州市沾化区决定采用倾斜摄影技术加快推进实景三维沾化建设,范围包括沾化区主城区、经济开发区和高新技术产业园,面积约90km2,模型分辨率为0.03m。
3.2 技术路线
采用Kodiak-100固定翼飞机搭载SWDC-Max6Ap150数字倾斜航摄仪获取实验区0.03m分辨率多视影像数据,经影像预处理、多视影像空三测量、稠密点云构建、三维模型重建等步骤制作倾斜摄影三维模型。
根据实验区范围的特点,划分为3个航摄分区,见图2,航摄设计参数如表2所示。

图2 分区航线敷设示意图
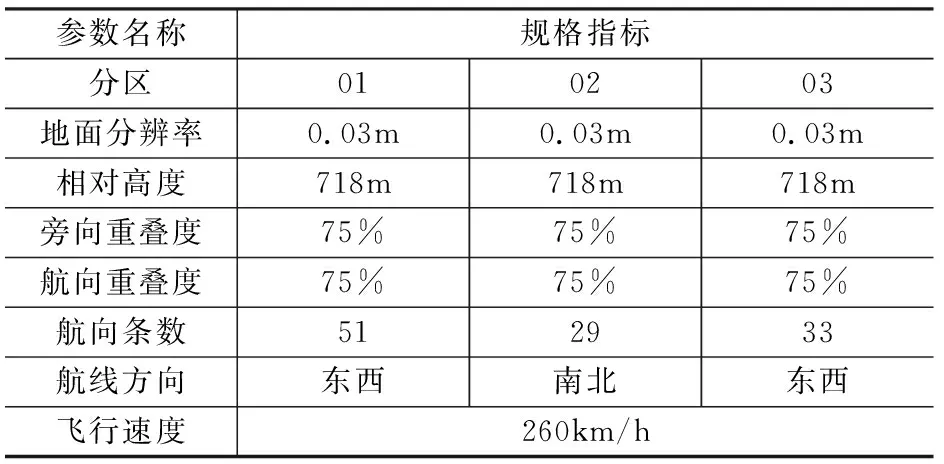
表2 航摄设计参数表
3.3 实施过程
3.3.1 倾斜航空摄影
2020年10月,山东省国土测绘院以滨州大高机场为起降场地,经过5个架次约24 h的飞行,成功获取沾化区城区和工业园区90km2,模型分辨率为0.03m倾斜影像数据。
3.3.2 三维建模
(1)数据预处理
对原始影像进行色彩、亮度和对比度的调整和匀色处理;采用外视场拼接技术生成下视虚拟影像;解算POS数据,引入相机检校文件与像片外方位元素,为空中三角测量做准备。
(2)多视影像空中三角测量
结合地面控制点、倾斜影像匹配结果及影像的内外方位元素,建立连接点和连接线、控制点坐标以及POS数据的多视影像自检校区域网平差的误差方程,进行POS辅助多视影像空中三角解算,得到多视影像的精确内外方位元素[11-12]。
(3)稠密点云构建
利用多视影像及各影像的内、外方位元素进行多视倾斜影像的特征提取和特征匹配。利用多视影像数据及其精确的内、外方位元素进行多视影像密集匹配,得到密集地表三维点云。
(4)三维模型重建
基于已定向的密集三维点云,构建不规则三角网,得到三角网表面模型(白模)),并利用多视影像及其精确的内、外方位元素来确定物方与像方的几何关系,对白模进行自动纹理映射,得到倾斜摄影三维模型。通过手工作业或者机器学习自动化手段,对倾斜摄影三维模型内的漏洞及存在遮挡区域进行补充修饰[13-14]。
3.4 模型效果
沾化实景三维模型总体颜色均匀、层次分明、表达精细,场景协调完整[15],满足了自然资源管理、城市精细化管理等需求(图3)。模型成果在资源调查、确权登记、国土空间规划、自然资源监督监管等自然资源管理中大显身手,有力推进自然资源管理三维化[16-17],也为沾化的城市更新和管理插上了智慧的“翅膀”,为系统、细致、客观认知城市规律,科学、精准谋划城市发展,完善城市治理体系,提高城市治理能力提供了支撑[18-20]。

图3 沾化实景三维模型效果图
3.5 模型精度分析
均匀选择4个精度验证区,采用网络RTK实测226个地面检核点,与实景三维解析同名点进行了精度对比。经检测,模型平面位置中误差为±0.082m,高程中误差为±0.172m,优于1∶500比例尺地形图精度要求。
4 结论与展望
(1)文中对制约高分辨率影像快速获取的像点位移、影像存储速度、安全飞行高度等因素进行了分析,对核心解决方案“外视场拼接”技术进行了阐述,结合SWDC-Max6Ap150数字倾斜航摄仪幅面、焦距、像片存储速度等性能参数,提出并论证了以快速固定翼飞机为载体获取3cm分辨率倾斜影像的技术方案。
(2)以智慧城市时空大数据平台省级试点沾化倾斜航摄为例,采用Kodiak-100固定翼飞机搭载SWDC-Max6Ap150高效数字航摄仪获取了沾化区主城区和工业园区90km2倾斜影像并采用自动化建模技术构建了实景三维模型。采用快速固定翼飞机为载体获取3cm分辨率倾斜影像为国内首次报道。高速固定翼飞机作航摄平台,有效提高了航摄效率,提升了航摄质量和三维建模效果,为构建城市级实景三维地理场景提供了经验和借鉴。
(3)倾斜摄影三维建模具有效率高、成本低、灵活便捷等优势。因倾斜摄影、贴近摄影、激光点云等单一建模技术都存在各自的局限性,随着对三维模型的细腻度、真实度以及精度要求的不断提高,多源数据融合建模将更加有利于宏观、逼真展示城市的形态,是三维建模的未来发展方向,对构建三维城市、孪生城市具有极大的推动作用。
猜你喜欢
江苏安全生产(2022年5期)2022-06-16 07:51:04
中国光学(2021年6期)2021-11-25 07:48:32
华人时刊(2021年23期)2021-03-08 09:27:24
数学物理学报(2019年3期)2019-07-23 01:15:40
中国医疗设备(2019年1期)2019-01-15 12:10:54
家庭影院技术(2018年9期)2018-11-02 05:31:32
自动化学报(2017年5期)2017-05-14 06:20:52
北方音乐(2017年4期)2017-05-04 03:40:09
成都信息工程大学学报(2017年6期)2017-03-16 03:04:32
激光与红外(2015年10期)2015-03-23 06:07:18