一种多重影像线特征匹配算法的设计与仿真
2022-08-22 15:37崔戈辉房金谱
计算机仿真 2022年7期
崔戈辉,房金谱
(1. 西安工业大学计算机科学与工程学院,陕西 西安 710021;2. 西安工业大学,陕西 西安 710021)
1 引言
在不同类型的影像中均含有大量有价值的几何和语义信息,影像匹配在三维建模中占据重要的地位,影像匹配是指分析两幅图像中相似特征之间的关联性,即求解不同影像之间的几何关系[1,2]。目前,影像匹配已经逐渐发展成为目标图像识别和配准的重要技术之一。和传统的影像相比,多重影像更加复杂,导致进行多重影像线特征匹配存在更大的难度。
为此,各种多重影像线特征匹配方法相继被提出,例如张平等人[3]通过直线检测算法针对参考图像和搜索图像进行直线特征提取,将提取结果进行编码处理,得到对应的直线对。将直线对设定为匹配基元,通过双重核线约束以及最优相似性原则确定同名直线对,对直线对进行拆分处理,同时结合仿射变换过程中不一致的单直线进行整合,获取最终的匹配结果。陈敏等人[4]优先分析不同直线特征之间的几何关系,构建特征区域和对应的描述符,采用双向匹配策略对图像直线特征进行初始匹配。结合初始匹配结果建立影像基础矩阵,同时借助自适应特征进行二次匹配。在设定的自适应特征区域内,提取影像内容一致的特征区域,获取相似特征描述符,完成特征点自适应匹配。
由于以上两种算法没有对多重影像进行边缘检测,导致匹配结果不理想,匹配效率下降,漏匹配率增加。为此提出一种基于仿射不变性的多重影像线特征匹配算法,经实验测试证明,所提算法能够有效提升匹配效率,降低漏匹配率,获取高精度的匹配结果。
2 多重影像线特征匹配算法
2.1 多重影像边缘检测
对于多重影像{f(x,y)}中的不同像素,需要考虑不同坐标下邻近点灰度的加权和,设定Sobel算子表示为
s(i,j)=|Δxf|+|Δyf|
(1)
式中,s(i,j)代表边缘图像;Δxf和Δyf分别代表不同的卷积算子,详细的表达形式如下
(2)
(3)
针对Sobel算子具有较强的方向性等特点,对已有Sobel算子进行改进,详细的操作步骤为:
优先对图像进行全局阈值分割处理,同时进行边缘提取,即可精准检测到多重影像各个方向的边缘[5,6]。经过以上分析,结合边缘提取以及数学形态学理论和方法,对多重影像进行边缘检测,详细的检测流程如图1所示。

图1 多重影像边缘检测流程图
结合图1,优先对多重影像进行阈值处理,主要使用迭代求全局阈值的方法,详细的操作步骤如下所示:
1)设定阈值为T,选取一个与之对应的初始估计值。
2)通过阈值T对多重影像进行分割。
3)计算亮度值G1和高度值G2,设定范围内像素的平均值。
4)计算一个全新的阈值。
5)重复步骤1)到步骤4),直至满足设定的约束条件。
当得到多重影像的最佳阈值T后,需要对多重影像进行二值化处理,得到经过分割处理后的影像[7,8]。对多重影像进行分割时,会出现将错误背景作为孤立像素的情况。因此,需要将背景中存在的孤立像素全部剔除,然后再进行闭运算。其中,闭运算的基本计算流程为:优先对多重影像进行膨胀;完成膨胀后再对其进行腐蚀,将影像中存在的小裂缝进行拟合,确保目标的位置和形状不发生任何改变。
通过上述分析,能够直接得到一个可以进行目标边缘检测的目标影像。通过Sobel算子实现目标影像的边缘检测,采用A表示。另外一幅多重目标影像需要先对其中一个阈值进行分割,然后再通过Sobel算子进行一次边缘检测,采用B表示。将两幅影像加以相加,即可获取一幅完成边缘检测的多重影像。
2.2 基于仿射不变的多重影像线特征提取
针对目标区域内的不同影像分别采取不同的分割方式进行划分,将梯度方向相同的点统一放置在一个支持区域内,同时提取对应的直线,详细的操作流程如下所示:
1)计算多重影像中各个像元对应的幅值以及梯度方向。
2)将梯度方向对应的值域划分为多个较小的区域,将各个区域进行编号。
3)通过连通成分算法将符号相同的邻接点进行连接,组成直线支持区。
4)提取每一个直线区域所对应的直线。
当得到像元的梯度后,可以通过方向的差异,根据一定的规则将多重影像划分为不同的直线支撑区域。将多重影像直线支持区域内的灰度表面借助平面进行展示。其中,平面中的参数是利用最小二乘法加权拟合获取,而且直线的各个面都是相互垂直的。结合2.1小节获取的边缘检测结果,优先提取边缘点所在的直线支持区,同时将全部像元设定为已知变量,通过计算得到不同边缘点的权值。采用最小二乘计算方法对直线支持区内的全部参数进行拟合,得到直线方程。详细的操作步骤如图2所示。
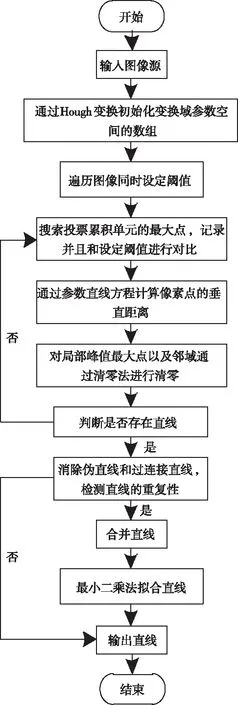
图2 多重影像线特征提取流程图
1)在二值化影像中获取不同坐标点的位置信息,将其存储到对应的二维数据组中。对数组中的全部像素进行遍历处理,得到对应的参数空间矩阵。
2)嵌入清零法的峰值检测:计算多重影像经过Hough变换后矩阵的最大极值点,即局部峰值点。获取该点的取值范围以及坐标位置信息,将其存储到对应的文件夹中。
3)消除伪直线和过连接直线:设定直线连接的最小间隔和检测直线的最小长度,结合两者的取值设定阈值,通过阈值进行伪直线和过连接直线的消除工作。
4)直线合并:由于直线本身具有长度和角度等多种不同的几何属性,所以在进行直线检测的过程中,需要结合阈值对两条直线之间的角度进行设定,当直线满足设定的约束条件,则将其进行合并。
5)直线拟合:当直线完成合并后,通过最小二乘法进行拟合,同时结合仿射不变特性完成多重影像线特征提取[9,10]。
2.3 多重影像线特征匹配
采用SIFT算子对特征区域进行描述,SIFT算子共包含4个步骤,具体如下所示:
1)尺度空间特征检测:
将原始多重影像和高斯函数两者进行卷积操作,形成高斯尺度空间。同时将卷积结果和邻近层次的卷积结果两者相减,获取DOG金字塔D(x,y,σ),具体的计算公式为

(4)
式中,G(x,y,σ)代表特征描述符;I(x,y)代表原始多重影像;L(x,y,σ)代表经过卷积操作后的多重影像;k代表特征描述符的总数。
2)特征点精确定位:
根据局部极值点对全部函数进行拟合,实现亚像素的精准定位,并且消除外界各种干扰因素带来的不良影响。
3)特征点主方向的计算:
设定邻域中心为特征点,以此为依据计算各个梯度方向的像素值。
4)特征描述符的形成:
设定特征点所在的方向为主方向,其中多重影像以特征点为中心进行旋转。设定中心窗口的大小为16×16,将其划分为4个规格相同的小块,经过计算得到对应的累加值,进而构建128维的SIFT特征向量,即特征描述符。
通过Hesssin-Affine和MSER算法对多重影像中的仿射不变特征进行提取,将目标提取区域进行标准化处理,形成全新的椭圆形区域,采用统一的参数形式进行描述。另外,还需要对得到的区域统一进行归一化处理,形成圆形区域。同时借助SIFT对区域的组成结构进行描述,在此基础上,结合欧式距离进行粗匹配,将匹配不成功的匹配点删除[11]。详细的操作步骤如下所示:
优先通过仿射不变量的方式对特征区域进行转换,形成椭圆区域。结合不同规格MSER特征区域内的像素信息建立二阶中心矩阵,同时将该区域调整为椭圆形区域,如公式(5)所示:

(5)
式中,X代表向量;R代表不规则区域;|R|代表不规则区域内相似像素的总数;E代表中心坐标点;T代表椭圆区域内全部像素点数量。
在上述分析的基础上,需要建立标准的椭圆方程,将两种不同形式的特征参数采用标准化机制进行描述,并且转换为标准的椭圆参数模式。另外,还需要将属性不同的特征进行属性统一。
为了对特征区域进行描述,同时保持原有区域内的内容能够顺利进行传递。结合特征点自相关矩阵M,将特征点xL和xR对应的椭圆区域经过归一化处理形成圆形区域,具体的计算式为

(6)
经过归一化处理后,两个特征区域之间的关系为
xL=RxR
(7)
将Hesssin-Affine和MSER获取的椭圆区域经过归一化处理形成圆形区域,优先通过SIFT计算主方向的方式计算获取各个特征点的主方向,并对多重影像根据特征点进行旋转,保持其旋转不变的特性。结合Hesssin-Affine和MSER特征区域的优势,优先采用SIFT描述目标区域内的全部向量,使多重影像具有旋转不变特性,并且对光照以及噪声等具有较好的抑制作用。所以,无论在任何位置都能够进行精准地匹配。
为了提升匹配结果的准确性,需要通过两个不同的阶段实现。第一阶段将提取的全部多重影像特征向量进行对比,获取可信度最高的匹配点;第二阶段分析不同多重影像之间的约束关系,同时设定约束条件,将不满足需求的特征向量剔除,获取高精度的匹配对。详细的操作步骤如下所示:
1)通过距离相似度的初始匹配:
当得到随机两幅多重影像的特征向量后,在多重影像中任意提取一个特征点,同时获取另外一个影像中相似的特征点。假设第一近距离和第二近距离之间的比例小于阈值,则说明两者是匹配的。另外,多重影像线特征匹配率会随着阈值的降低而增加。
2)基于核线约束的特征匹配:
核线约束在计算机视觉中也可以称为极限几何约束,主要采用基础矩阵F描述任意两幅多重影像之间的核线约束关系。
利用RANSANC算法对各个多重影像之间的关系进行分析,进而获取基本矩阵F,结合矩阵完成基于核线约束的匹配。
3 仿真研究
为了验证所提基于仿射不变性的多重影像线特征匹配算法的有效性,选取文献[3]方法和文献[4]方法作为对比方法,进行仿真实验测试。
为了实现多重影像的匹配,需要对各个算法的匹配性能进行测试,实验优先对比三种不同匹配算法的正确匹配对数量,详细的实验结果如表1所示。

表1 不同视角下的正确匹配对数量
分析表1中的实验数据可知,当视角开始增加,各个方法的正确匹配对数量开始呈下降趋势,但是相比另外两种方法,所提方法的正确匹配对数量明显更高一些。
分析各个方法在不同实验次数下的正确匹配率,详细的实验对比结果如图3所示。
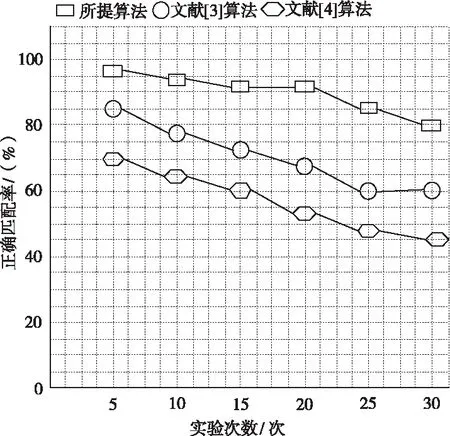
图3 不同算法的正确匹配率仿真测试
分析图3中的实验数据可知,所提算法的匹配结果明显更好,同时具有较高的正确匹配率。
为了更进一步验证所提算法的匹配性能,实验选取一幅多重影像作为测试对象,对各个算法的匹配性能进行测试,详细的实验结果如图4所示。
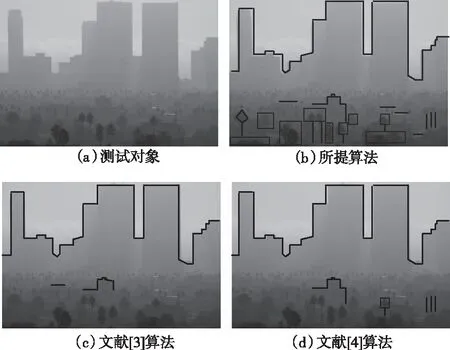
图4 不同算法的匹配结果测试分析
根据图4可知,相比另外两种算法,所提方法能够更加精准提取多重影像的线特征,进而更好地进行线特征匹配,获取满意的匹配结果。
在进行多重影像线特征匹配的过程中,会存在遗漏匹配的情况,以下实验测试将漏匹配率设定为测试指标,详细的实验对比结果如5所示。

图5 不同算法的漏匹配率对比结果
分析图5中的实验数据可知,相比另外两种算法,所提算法的漏匹配率明显更低一些,其漏匹配率始终低于5%。
为了更进一步验证所提算法的有效性,以下测试三种不同算法的匹配效率,详细的实验对比结果如图6所示。
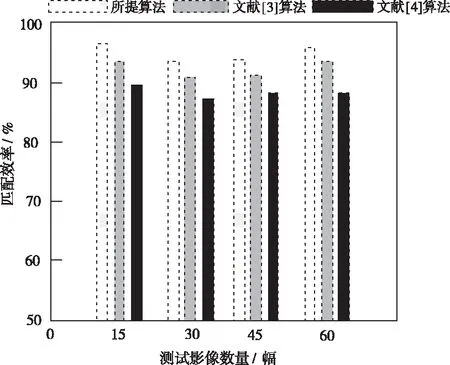
图6 不同算法的匹配效率对比结果
分析图6中的实验数据可知,由于所提算法在进行多重影像线特征匹配之前,对影像进行了边缘检测,并结合边缘检测结果进行特征匹配,能够有效优化特征匹配流程,促使整个算法的匹配效率得到有效提升,明显优于另外两种算法。
4 结束语
多重影像线特征匹配是目前三维重建过程中的难点和热点话题,通过对现有算法的分析和总结,提出一种基于仿射不变性的多重影像线特征匹配算法。实验测试结果表明,所提算法能够有效提升匹配结果的准确性和匹配效率,降低漏匹配率,更好地完成多重影像线特征匹配。
由于研究时间和精力有限,所提算法仍然存在一定的不足,后续将对其展开更加深入地研究。
猜你喜欢
现代电子技术(2022年11期)2022-06-14
建材发展导向(2021年19期)2021-12-06
科技研究(2021年15期)2021-09-10
分析化学(2017年12期)2017-12-25
小学生导刊(低年级)(2017年2期)2017-06-10
小天使·六年级语数英综合(2017年5期)2017-05-27
通信产业报(2016年44期)2017-03-13
新高考·高二数学(2014年7期)2014-09-18
幼儿时代·故事妈妈(2004年4期)2004-03-17
雕塑(1999年2期)1999-06-28