
空间站系统柔性多体动力学建模与仿真
2022-08-22 13:16葛东明罗文成邓润然朱卫红史纪鑫邹元杰
航天器工程 2022年4期
葛东明 罗文成 邓润然 朱卫红 史纪鑫 邹元杰
(北京空间飞行器总体设计部,北京 100094)
空间站是一种可在绕地球近地轨道上长时间运行、支持人类长期工作和生活的航天器,与人造卫星、载人飞船、航天飞机等其他太空飞行航天器相比,空间站具有容积大、载人多、寿命长、综合利用程度高等优点,是人类进入太空的重要基地。中国载人航天工程总设计师周建平介绍,我国的空间站是组合式多舱段结构,基本构型由一个核心舱和两个实验舱组成,运营期间还包括载人飞船和货运飞船,单舱质量达20 t级,系统总质量可达100 t,太阳翼翼展超过60 m[1-2]。由于空间站整站规模十分庞大,无法一次发射,需要在轨建造与组装,且运行期间构型也多次变化[3]。系统级动力学与控制联合仿真是保障方案设计合理性的重要分析手段,其中的空间站转位过程柔性多体动力学模型是仿真分析工作的重要基础[4-6]。
空间站是典型的大惯量、超低频、多体运动的刚柔耦合系统,不仅包含舱体大范围运动和机械臂大角度多体运动,还涉及太阳翼和柔性关节振动,系统非线性动力学交叉耦合效应十分复杂[7-9]。此外,与传统的刚性/半刚性太阳翼不同,核心舱和实验舱均采用挂毯式非线性柔性太阳翼,其展开面积大、惯量占比高,属于低频、非线性、模态密集大型空间柔性结构。柔性部件及其固有的动力学特性导致系统存在严重的欠驱动特征,使得控制高度复杂化,忽略弹性效应假设为刚体模型,将导致定位误差,甚至是控制与结构的耦合风险。空间站在轨操控是一个构型连续变化、姿态运动、机械臂运动和结构振动交叉耦合的时变过程,传统的准静态线性化动力学建模方法已经无法准确描述此动态过程的力学行为。因此,研究空间站柔性多体动力学模型对于总体方案设计、控制系统设计、联合仿真分析、甚至是在轨任务支持都是十分必要的[10-15]。
虽然刚柔耦合多体系统的动力学建模问题在过往几十年中得到了大量的理论和方法研究,且涌现出如ADAMS,SimulationX,SimScape等广泛应用的CAE商业软件,但对于空间站这类复杂航天器多学科、系统级的分析与仿真要求,目前的建模手段由于非线性结构不适用、接口不开放、求解效率低、功能不完备等问题,难以满足要求,主要问题有:①针对核心舱太阳翼结构的非线性特性,商业软件在有限元模型到模态中性文件转化过程中,存在功能不完善或模型不准确等问题;②商业软件由于技术保密,无法给出解析式的动力学模型表达,且如结构阻尼、积分器等关键细节没有详细说明,模型不完全在自主掌控范围内;③由于商业软件所建立的模型是封装形式,无法进行代码输出或代码不可移植,导致与控制等其它系统模型联合仿真效率低下;④目前文献中给出的建模方法,多适用于简单对象或具体对象,且结构体的柔性特性一般按照假设模态处理,无法适用于工程复杂对象的建模问题[16-19]。
针对空间站对快速设计迭代和在轨任务实时仿真的迫切需求,突破商业软件的局限性,基于拉格朗日方程和有限元方法,本文提出了一种空间站系统柔性多体动力学建模方法,模型适用于任意开链式树形拓扑结构。相比于基于全局坐标系描述得到的微分代数方程,所推导的动力学方程为基于独立坐标的常微分方程,且质量矩阵、非线性速度项和雅可比矩阵等均为解析式描述,无论对于仿真计算、动力学分析、还是基于模型的控制设计都是十分适用的。结合空间站舱段转位实际对象,本文所建立的动力学模型保证了与商业柔性多体软件ADAMS同等的仿真精度,且模型程序开源、可移植、通用化,便于与控制系统等模型联合形成仿真系统,为空间站转位过程的系统级多学科集成仿真分析和在轨任务高效仿真预示奠定了模型基础。
1 柔性多体系统建模
1.1 问题描述
空间站在轨建造与运行过程中,需要机械臂等空间机构辅助完成舱段转位、转移航天员、舱外货物搬运等任务,是一个典型的大惯量、超低频、多级驱动的在轨操控过程,如图1所示。
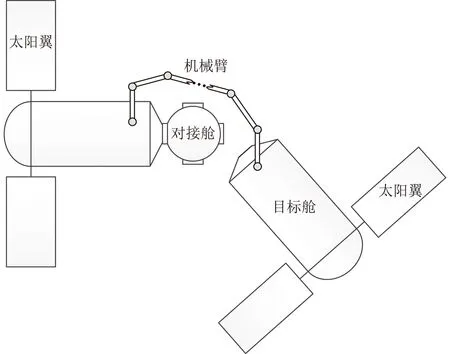
图1 空间站机械臂辅助舱段转位示意图
将空间站在轨操控过程描述为一般性的树形开链式柔性多体力学模型,如图2所示,建立其运动学和动力学方程。系统由本体B0、部件Bi和关节Ji组成,部件之间通过单自由度驱动关节连接,本体为刚体,部件可为刚体或柔性体,关节可为直驱转动副或考虑驱动刚度的转动副。采用惯性系和体参考系描述系统,Σ0是本体B0参考系,Σi是部件Bi参考系,ri是Σi在前一个体Bi-1参考系Σi-1中的位置矢量,不考虑关节的几何尺寸,i=0, 1, …,n。

图2 树形开链式柔性多体系统
1.2 柔性体运动方程
本文考虑的柔性体为线性小变形结构,对于非线性结构,可通过线性化处理为线性结构,针对图2中的第i个部件,其无阻尼自由振动方程为
(1)
式中:mai为质量矩阵;kai为刚度矩阵;xai为节点位移响应。
采用子结构Craig-Bampon模态法[20],将部件Bi的节点位移变换到混合坐标空间内描述如下。
xai=Φai,cξai+Φai,nηai
(2)

利用式(2)对式(1)坐标变换,得
(3)
式中:Mai为质量阵;Lai为刚柔耦合系数阵;Kai为刚度阵。
机械臂关节是由电机和减速器组成的驱动机构,将其模化为电机转子+弹簧系,如图4所示,其中电机转子为刚体,描述关节的质量特性,弹簧系描述减速器的驱动刚度,其运动方程为
(4)
式中:ξti,1代表刚体位移;ξti,2代表弹性变形位移;Mti是关节质量阵;Kti是驱动刚度阵。
1.3 系统运动学方程
根据系统的拓扑结构和约束关系,建立系统的运动学方程。对于前后连接的两个体Bk-1和Bk,其连接关系式为
(5)
(6)
式中:qk为关节转动角度;βk为转动轴选择阵;Sk-1为体Bk相对于体Bk-1的位置安装阵;Ck-1(qk)为参考系Σk-1到参考系Σk的转换矩阵,默认关节Jk的参考系与体Bk的参考系Σk方向一致,k=1, 2, …,n。
定义中间变量
Rk(qk)=Ck-1(qk)Sk-1
(7)
整理式(6),得
(8)
令
(9)
(10)
Φk,k=βk
(11)
(12)
Ξk,k-1=Ck-1(qk)
(13)
(14)
进一步整理式(8),得
(15)
1.4 系统动力学方程
利用第二类拉格朗日方程,建立系统动力学方程。根据1.1节各体的运动方程,系统的动能和势能表达式为
(16)

(17)
由递归式的牛顿-欧拉法描述的动力学方程一般为微分代数方程,不便于动力学分析和控制设计。本文采用第二类拉格朗日方程,其可以获得基于独立坐标的解析式常微分方程。
由系统动能描述(16)和势能描述(17),利用经典形式的第二类拉格朗日方程推导部件自由度,利用准坐标形式的拉格朗日方程推导基座自由度,最终获得系统动力学方程如下。
(18)
K=diag(Kt1,…,Ktn,…,Ka1,ξ,…,Kan,ξ,…,
Ka1,η,…,Kan,η)
(19)

2 应用实例
2.1 系统动力学分析及仿真验证
针对空间站核心舱,双太阳翼和七自由度机械臂组成的在轨系统,将核心舱舱体作为刚体考虑,两侧太阳翼和机械臂臂杆作为柔性体考虑、同时考虑机械臂关节的电机驱动刚度,下面采用商业柔性多体软件ADAMS验证所给出的建模方法的正确性。
由于ADAMS对非线性太阳翼有限元模型无法生成准确的模态中性文件,为保证模型输入条件一致性,此处采用线性太阳翼模型,所建立的ADAMS对比验证模型如图5所示。对核心舱舱体和机械臂各关节施加一定的作用力,图6~图8给出了本文的柔性多体动力学建模方法与商业软件ADAMS模型的仿真结果对比曲线,其中黑色实线为采用本文动力学方程的仿真结果,蓝色虚线为ADAMS模型的仿真结果,其中,图6为核心舱姿态角速度对比曲线,图7为机械臂关节角响应对比曲线,图8为机械臂关节约束力矩对比曲线可以看出,核心舱姿态角速度和机械臂关节角仿真曲线完全吻合(图6和图7),机械臂关节约束力矩具有较高的一致性(图8),对比分析结果说明了本文给出的柔性多体动力学建模方法的正确性和合理性,所给出的动力学方程可以作为空间站动力学与控制系统仿真的基础模型。
图5 核心舱在轨操作柔性多体动力学ADAMS模型
图6 核心舱姿态角速度响应对比结果
图7 机械臂关节角响应对比结果
图8 机械臂关节1约束力矩对比结果
2.2 动力学与控制联合仿真
为了验证本文方法所建立的系统动力学模型可以用于与控制系统的联合仿真,将柔性多体动力学方程与机械臂控制模型连接形成闭环系统,如图9所示。给定机械臂的期望关节角,图10给出了闭环控制仿真条件下的机械臂对给定关节角命令的跟踪曲线。可以看出,在闭环控制联合仿真条件下,机械臂实现了对期望关节角轨迹的稳定跟踪,动力学模型能够保证对系统动力学行为的稳定求解。
图9 基于数学模型的动力学与控制仿真框图
图10 机械臂关节角响应对比结果
由此可见,与基于商业软件建立动力学与控制联合仿真平台不同,采用本文给出的动力学建模方法,可以实现对空间站动力学与控制的系统级全数学建模。由于模型完全自主开放,特别是采用C语言编程实现后,可将模型求解效率大幅提升,甚至是实时仿真,由此带来的高效率计算求解、大规模打靶仿真等显著优势,有力支持了核心舱太阳翼动力学参数辨识试验冲击条件分析、在轨转位试验仿真预示等任务。
2.3 核心舱太阳翼在轨辨识超实时仿真计算
由于空间站规模庞大,受限于地面试验条件限制,空间站系统级动力学试验难以开展。因此,开展核心舱太阳翼在轨动力学参数辨识试验,搞清挂毯式太阳翼在轨动力学机理及各类动力学参数,对于我国空间站建造具有重要意义。
对于辨识激励条件设计而言,除保证能够充分激励起太阳翼的结构振动并获取有效的测量数据外,还需重点关注本体冲击条件下太阳翼柔性阵面振动、以及太阳翼主伸展机构和空间机械臂根部所承受的载荷受力情况。为充分保障试验条件的有效性和合理性,需要完成上百种激励条件的仿真分析,还要具备现场试验条件临时调整激励条件的快速分析能力,对动力学仿真分析计算效率提出了严峻挑战。
利用本文所给出的动力学建模方法,建立基于自研软件的太阳翼在轨辨识激励条件仿真分析模型,实现了超实时计算效率,将商业软件3 h计算开销提升到2 min,计算效率提升2个数量级(图11),圆满完成了9大类、近400种工况的动力学仿真分析任务,全程支持在轨辨识试验。
图11 核心舱太阳翼在轨辨识激励仿真分析效率对比
3 结束语
针对现有基于商业软件的动力学建模与联合仿真方法存在的仿真效率低、模型不开放、功能不完备等问题,本文从基本理论与方法出发,提出了航天器通用柔性多体动力学建模方法,实现了核心技术自主可控,既适用于大型空间组合体柔性动力学分析,也适用于具有多级运动特征的航天器动力学、控制与联合仿真,为小天体采样探测、在轨服务等具有空间操控类航天器的系统级动力学与控制高效仿真分析任务奠定了技术基础。
猜你喜欢
军事文摘(2022年18期)2022-10-14
空气动力学学报(2022年4期)2022-08-23
建材发展导向(2022年14期)2022-08-19
军事文摘(2022年12期)2022-07-13
航天制造技术(2022年2期)2022-05-17
小天使·三年级语数英综合(2022年4期)2022-04-28
现代企业(2021年11期)2021-12-08
智富时代(2018年1期)2018-03-26
智富时代(2018年1期)2018-03-26
中学生理科应试(2017年7期)2017-08-09
