
空间引力波探测航天器关键技术分析
2022-08-22 13:16胡越欣张立华高永魏然谭定银段会宗王丽娇
航天器工程 2022年4期
胡越欣 张立华 高永 魏然 谭定银 段会宗 王丽娇
(1 航天东方红卫星有限公司,北京 100094)(2 北京控制工程研究所,北京 100094)(3 北京空间飞行器总体设计部,北京 100094)(4 华中科技大学 物理学院,武汉 430074)(5 中山大学 天琴中心,广东珠海 519082)
2016年,美国激光干涉引力波天文台(LIGO)地面引力波探测实验宣布首次探测到引力波,人类进入利用引力波来探测宇宙的全新时期。LIGO通过在地面建设大型激光干涉仪探测引力波,每条激光臂长4 km,主要用于探测太阳质量大小的恒星级黑洞并合产生的10 Hz~1 kHz频段引力波[1]。更低频的由百万太阳质量级别的超大质量黑洞产生的毫赫兹附近频段的引力波,则需要臂长为10万千米级别的激光干涉仪进行探测。这时,只能将整个探测器放置到太空中,进行空间引力波探测。因此,空间引力波探测具有比地面探测更丰富的波源和更远的探测距离,其科学研究前景巨大。
空间引力波探测的前景伴随着空前的技术挑战。空间引力波探测对各方面技术指标的极高要求,需要解决一系列新问题,主要包括以下几个方面。首先,空间引力波探测利用若干个参考物体(称为检验质量)的自由落体运动来勾画出背景时空的曲率特征。因此,空间引力波探测要求各个检验质量只在引力的影响下运动。在真实的试验环境中,任何一个物体都不可能只受引力的影响,因此必须将其他非引力因素的干扰消减或补偿到可接受的范围内。其次,空间引力波探测中检验质量被放置到十几万到上百万千米的间距上,再利用激光测量两者间距离的变化。激光光束经过长距离传播,再加上航天器之间的相对运动所产生的效应,光束的特性会发生相应的变化,如光功率衰减、激光频率漂移、波前畸变等。这类变化的效应在其他试验中通常可以被忽略掉,但是对于空间引力波探测而言,则需要充分加以考虑。再次,典型的空间引力波探测方案都要求采用3个以上航天器并保持高精度的编队。在这个过程中,既要保证航天器间激光链路的精确指向,又必须抑制不等臂长干涉测量所引入的测量噪声。因此,需要航天器平台轨道与姿态控制、无拖曳控制、器间光束指向测控等几个方面之间的高度协调配合,实现对3个(或更多个)航天器的几十个动力学自由度的自主协同控制。最后,为了配合高精度惯性基准、高精度器间激光干涉测量,以及高精度大型航天器编队的实现,航天器平台本身需要具体苛刻的性能特性和高精度控制能力,比如需要具备极强的温度控制能力和热稳定性、磁环境控制能力和极低的结构噪声等。
空间引力波探测的核心技术是在建立高精度空间惯性基准平台上进行高精度的器间激光干涉测量,也就是建立超静超稳的高精度空间惯性基准和实现高精度激光干涉测量。本文针对实现高精度空间惯性基准平台与高精度激光干涉测量所需的航天器关键技术进行研究,并对天琴一号在轨完成的关键技术实现指标进行了介绍,最后给出了关键技术发展建议。
1 空间引力波探测航天器计划
在国际空间引力波探测领域,空间引力波探测计划主要包络欧洲激光干涉仪空间天线(LISA)计划[2-3],日本分赫兹干涉引力波天文台(DECIGO)计划[4],中国天琴计划[5]和太极计划[6]。空间引力波探测任务均采用3个航天器构成三角形编队,航天器之间保持一定的距离,根据测量波段的选择,航天器间的距离从几千千米到上亿千米不等,通过高精度惯性传感器测量作为非保守力敏感器,微牛级变推力器作为执行机构实现无拖曳控制消除非保守力带来的干扰因素,并通过高精度的激光干涉测距技术实现空间引力波信号的探测。测量频段通常在0.1 mHz~1.0 Hz,惯性敏感器的测量精度达到1×10-15m/(s2·Hz1/2),航天器间激光测距精度在数十万千米到数百万千米距离上达到10-12mHz1/2量级[7]。
在LISA计划中,2034年将发射3个完全相同的无拖曳控制航天器组成编队,每个航天器各自按类地球轨道绕太阳飞行。3个航天器两两间距离约为250万千米,落后地球约为20°,航天器组成的平面与黄道面夹角约为60°。3个航天器组成3个非独立的夹角约为60°的迈科尔逊干涉仪,用来测量航天器间由引力波引起的距离变化。每个航天器同时装载2个检验质量,作为3个迈科尔逊干涉仪的端点及无拖曳航天器所需的惯性传感器。LISA主要探测0.1 mHz~1.0 Hz频段内的引力波[8],示意见图1。

图1 空间引力波探测LISA计划
日本在2001年提出了空间引力波探测DECIGO任务概念。其主要目标是探测中频引力波(0.1~10.0 Hz),填补LISA与地面引力波探测装置之间的频率空白。DECIGO包含3个干涉臂,每个干涉臂长1000 km,镜面直径1 m。DECIGO与LISA等空间引力波探测方案的重大区别是采用F-P腔模式的激光干涉臂[4]。DECIGO原计划2020年中期发射,目前有较大延后,没有进一步明确的发射时间表。
中国天琴计划预计于2035年发射3颗相同的卫星构成一个等边三角形编队,每颗卫星内部包含完全悬浮起来的参考物体。卫星将进行高精度无拖曳控制,以抵消太阳风或太阳光压等造成的细微非引力扰动,从而保证参考物体只在引力的作用下运动。高精度的激光干涉测量技术将被用来记录参考物体之间的细微距离变化,用于获得有关引力波的信息。天琴计划的3颗卫星将在以地球为中心、高度约10万千米的轨道上运行[9],示意见图2。
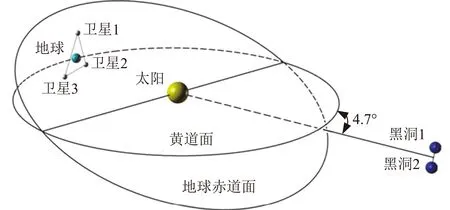
图2 空间引力波探测天琴计划
中国太极计划,在轨道构型、臂长选取等各个方面都与欧洲LISA非常接近。
通过对国内外空间引力波探测计划的研究,高精度的激光干涉测距是获取空间引力波信号的基本手段,航天器的内部检验质量在空间中沿测地线运动是空间引力波探测的基本条件。为了实现这个目标,需要为激光测距提供一个超静超稳的航天器平台,控制检验质量受到的外界干扰水平并保证激光干涉测距与惯性传感器测量的超高精度。
2 关键技术分析
2.1 航天器各关键技术分析与指标分解
为了实现空间引力波探测,航天器研制还有许多技术难点需要解决,主要体现在以下4个方面。
(1)构建一个超静航天器平台,可以保证航天器内部的检验质量在近纯引力的影响下运动,将其他非引力因素和干扰抑制或补偿到一个可以接受的范围,这样可以通过若干个检验质量的自由落地运动勾画出背景时空的曲率特征。
(2)通过激光干涉测量技术实现几十万至几百万千米间精确测量出2个检验质量的微小位移变化,要求航天器平台提供一个超稳的测量平台,确保激光干涉测量系统测量出的微小位移变化确实由引力波引起。
(3)保证3个航天器构成并保持高精度的编队或星座,实现高精度的轨道测量、确定和控制。为此,需要实现高精度的航天器姿态控制和无拖曳控制技术,并与高精度的器间光束指向控制等诸多方面协调配合,实现多自由度条件下对航天器的自主协同控制。
(4)实现高精度惯性基准、高精度器间激光干涉测量及高精度编队飞行,需要超稳航天器平台具备超强的温控能力与热稳定性,超低的结构噪声和超高的机构稳定性,另外,在磁稳定性上也有极高的要求。
通过以上分析,要实现空间引力波探测,航天器平台需要达到以下指标:①航天器激光干涉测距方向的无拖曳控制要使检验质量处的加速度噪声水平控制在10-15m/(s2·Hz1/2)量级;②航天器关键部位热稳定度需要达到10-6K/Hz1/2量级;③航天器间指向控制精度达到10 nrad;④航天器内部检验质量处磁场控制达到10 μT;⑤航天器自引力控制要达到1 nm/s2。目前,国内外已有的航天器平台与上述指标相比,基本存在1个甚至几个数量级的差距,本文从顶层出发将上述技术指标拆解为航天器平台需要深入研究和攻关的各项关键技术,具体如下。
(1)无拖曳与姿态控制技术。无拖曳技术是实现空间引力波探测的关键技术,需要精确测量出非保守力并基于自适应、智能等控制方法利用微牛级可变推力系统消除非保守力对航天器的影响,检验质量处的加速度噪声水平控制在10-15m/(s2·Hz1/2)量级,使3个航天器激光干涉臂相互对准精度达到10 nrad水平。
(2)连续可调微推进技术。作为完成无拖曳与姿态控制的执行机构,航天器在轨会受到太阳光压等环境干扰力的影响,这些干扰力都是微牛级的,并且具有连续变化的特点,为了达到检验质量处的加速度噪声水平控制在10-15m/(s2·Hz1/2)量级,完成空间引力波探测的连续可调推进需要达到0.1 μN的分辨率和噪声控制。
(3)超稳定材料与结构技术。要使3个航天器激光干涉臂相互对准精度达到10 nrad,在完成高精度航天器姿态控制的前提下,必须要求航天器拥有良好的机构稳定性,使由于结构形变引入的指向偏差满足空间引力波探测要求。
(4)超稳定温度控制技术。高精度激光干涉测量系统与惯性测量敏感器的测量精度对稳定性要求极高,按照空间引力波探测需求,光学平台等关键部位的温度稳定控制水平要达到10-6K/Hz1/2量级,必须发展新的热控方法与手段解决超高精度控制问题。高精度热控问题是一个系统性问题,要从轨道选择、机构布局、工作模式设计等方面统筹考虑,保证内外热流的稳定性。
(5)航天器质心及自引力控制技术。航天器自身的引力作用会增加检验质量测量频段的加速度噪声,因此要以检验质量为中心进行自引力精细设计,保证检验质量尽可能地靠近航天器的质心,同时增加质心调节手段完善在轨质心标定技术,确保自引力引入的加速度噪声满足空间引力波探测需求。
目前,许多科研机构对空间引力波探测航天器关键技术在各个领域进行技术攻关,天琴计划采取分步走的措施进行渐进式的攻关,具有代表意义。
2.2 天琴一号关键技术验证
空间引力波探测技术难度大,许多关键技术指标离现实还有巨大差距,因此需要进行分步走的策略完成关键技术攻关。天琴计划中的第1颗技术试验卫星天琴一号作为验证空间引力波探测技术的试验卫星,在2019年12月20日成功发射,其主要目标是构建一个高精度惯性基准并对空间引力波探测的相关关键技术进行验证,具体包括:①无拖曳控制技术;②高精度惯性测量技术;③微牛级连续可调微推进技术;④高稳定温度控制技术;⑤高稳定质心控制技术。
天琴一号卫星包括平台和试验载荷两大部分,见图3。其中:平台由结构与机构、热控、控制、能源、测控、星务组成;试验载荷包括惯性传感器系统、激光干涉测量系统、高精度测控温系统、微牛级变推力系统和无拖曳控制系统5个部分。

图3 天琴一号卫星组成
天琴一号卫星配置1台高精度惯性传感器作为卫星受到非保守力的测量敏感器,安装1台连续可调微牛级推力器抵消卫星受到的非保守力,通过无拖曳控制器使卫星实现无拖曳控制,无拖曳控制包含加速度无拖曳控制与位移无拖曳控制模式。高精度温控组件对关键载荷进行高精度温控,保证关键载荷的工作稳定性。另外,在轨通过高精度惯性传感器输出数据进行高精度的质心检测。各关键技术指标与实现情况见表1。
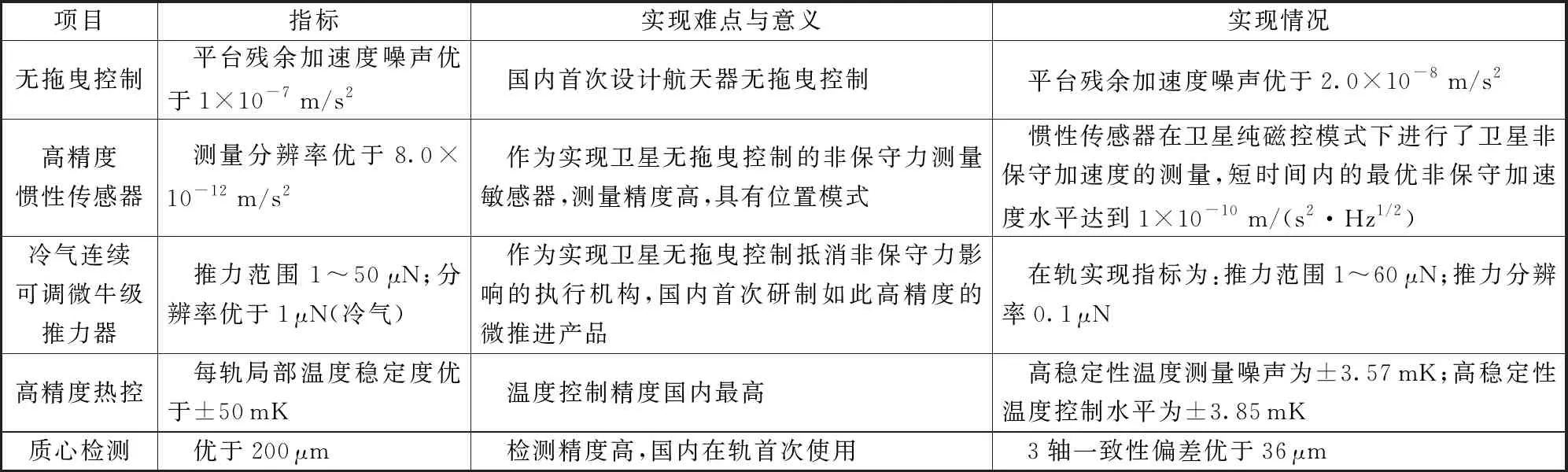
表1 关键技术指标与实现情况
3 关键技术发展建议
为了满足未来空间引力波探测任务的需求,航天器平台重点应从位移模式的无拖曳控制、微牛级连续可调微推进技术等技术重点攻关,航天器载荷从质心检测、高精度惯性测量技术等技术突破提高。
3.1 位移模式无拖曳控制
虽然天琴一号卫星获得了国内第1个位移模式无拖曳控制收敛结果,但也存在多组位移模式无拖曳控制在轨试验发散的情况。分析这些发散现象,可以判定无拖曳推进最大推力不足,而且该无拖曳控制自由度与检验质量另外5个静电悬浮控制自由度存在耦合,因此无拖曳控制对象的实际模型十分复杂。另外,惯性传感器检验质量块负刚度系数在轨实际数值较大,导致最大推力不足。由此可见,从目前我国位移模式无拖曳技术水平到满足空间引力波探测科学卫星研制,还有很长的路要走。
ESA在2015年发射并在轨试验成功的LISA探路者(Pathfinder)卫星由刚性卫星及其内部2个参考质量组成,共有18个运动自由度。其中:参考质量1,2具有x1,y1,z1,θ1,y2,z2共6个自由度进行无拖曳控制,并且平动自由度x1与转动自由度θ1耦合在一起构成多输入多输出(MIMO)系统[10-11]。LISA、天琴和太极引力波探测科学任务航天器,按目前规划均由1个刚性环形舱体与其环内Y形激光干涉仪组成,在Y形激光干涉仪上部2个叉臂内笼框中分别悬浮1个长方体检验质量。叉臂顶端各安装1台激光望远镜,并且其中1台望远镜具有垂直于激光干涉仪平面的1个转动自由度。因此,单个航天器共有19个自由度。后续位移模式无拖曳技术研究具体包括:①高精度航天器控制对象建模技术;②位移模式无拖曳与姿态指向控制技术;③位移模式无拖曳控制效果评估技术;④无拖曳控制系统模型参数辨识技术;⑤无拖曳系统转入科学测量模式序列优化设计技术;⑥无拖曳控制数值与物理仿真技术。
3.2 微牛级连续可调微推进技术
未来引力波探测需要更高的推力精度、更低的推力噪声,以及更宽的推力范围,因此需要对微牛级变推力冷气推力器、射频离子推力器、场效应推力器及会切型霍尔推力器在未来空间引力波探测领域应用的可行性进行分析、论证。
(1)冷气微推力器。它主要包括气瓶、减压模块、推力器模块和控制电路模块。气瓶中充高压气体,选择氮气作为推进剂。减压模块把高压气体减压到推力器的工作压力。推力器模块根据控制指令设置的推力,调节带喷嘴的比例阀的喷嘴喉部面积,达到相应的质量流量,产生相应大小的推力。为维持某设定好的推力,可根据质量流量传感器实时测量气体质量流量,微调带喷嘴的比例阀的喉部面积,使气体质量流量在极小的范围内波动,实现推力的闭环控制。微牛级冷气变推力推进系统的推力范围较宽,可达0.1~1000.0 μN,但是比冲较低,仅30~60 s,适用于对太阳光压等量级较小的非保守力进行补偿[12]。
(2)射频离子推力器。它主要基于射频感性耦合等离子自持放电。质量流量控制器可实现高精度气体工质流量控制,气体工质流经推力器中的气体分配器进入放电室。当射频电流加载到射频天线时,在放电室内部会形成电磁场,电子在电场中获得能量与中性原子碰撞,使其发生电离,形成射频等离子体自持放电。放电室中的离子由离子光学系统加速引出,产生推力。此外,中和器发射电子流,中和推力器的离子束流,使射频离子推进系统保持电中性[13]。
(3)场效应推力器。它与胶体推力器工作原理相同,在毛细力和强电场的电场力作用下,液体工质在发射极表面形成泰勒锥并产生场致离子发射效应,可以得到较高的比冲。2种推力器不同点在于工质不同,场效应推力器的工质为液态金属,而胶体推力器的工质为离子液体,胶体推力器优点是发射极可以采用多孔材料,降低加工工艺难度,但需要增加微泵驱动液体工质。2种推力器的寿命都受限于发射极,对于长期空间任务首先需要攻克发射极材料腐蚀难题[13-14]。
(4)会切型霍尔推力器。会切型霍尔推力器的特点在于放电通道形状为圆柱形,磁场是由通道外极性相反的多级环形永磁体形成的会切型磁场。其余部件与传统霍尔推力器类似,在通道上游设置阳极和气体分配器,推力器外侧下游安装阴极。在推力器工作过程中,阴极释放的电子受到电场影响进入推力器内部被磁力线捕获,在磁镜效应的作用下电子在通道内部磁尖端处往复螺旋运动,在此过程中部分电子会与通道内的工质气体发生碰撞并电离形成新的离子和电子,发生雪崩电离。电子经过多次传导后到达阳极形成放电回路,离子则在电场作用下加速喷出形成推力[15]。
3.3 高稳定温度控制技术
高精度温度控制是传热过程控制,系统热设计的合理性制约着控温效果;而高精度温度测量是实现高精度控温的前提和基础。自主控制策略与合理热设计配合,才能实现精密控温。因此,一个高精度控温系统的性能取决于系统多级热控和高精度测控温技术。
对于系统热控设计,主要采用偏低温、多级隔热和分级主动控温加热设计,在通过多级隔热尽量减小热扰动的前提下,使用主动控温技术对热扰动进行抑制。LISA的光学平台通过多级隔热技术,将外热流的影响降低至输入热流的0.06‰[16-17]。
对于测控温技术,当前使用的电子学测温技术由于电路噪声、敏感器噪声等一系列测温链路噪声存在,几乎不可能实现10-6K/Hz1/2量级的直接温度测量。基于电子学测量系统的测温技术,一般是在自身极限测量能力的基础上进行数值运算,以消除基底噪声,此类方法噪声水平可以达到3×10-5K/Hz1/2。由于直接测量无法达到引力波探测要求的1×10-6K/Hz1/2的热噪声测量要求,通常的做法是对安装界面至检验质量之间的导热路径做进一步热分析,通过数值分析确定最终检验质量的热噪声水平。
基于天琴一号,在后续的超低噪声热控技术发展中,主要的工作方向为:①基于负温度系数(NTC)测温系统的超低热噪声测量系统;②基于比例-积分-微分(PID)控制算法的稳流输出控温系统;③基于多种隔热材料耦合的多级隔热系统;④大热流变化及复杂整星工作模式的热流衰减超低噪声控制系统;⑤超低频超低热噪声地面半物理仿真平台;⑥基于傅立叶变换的温度频谱分析及超低噪声评价准则。
3.4 质心检测
2021年年底中国发射的科学探测卫星,对质心检测与修正的指标要求与美国重力校正和气候实验(GRACE)卫星一致,即:①在轨3轴质心标定精度优于50 μm;②在轨3轴质心偏差小于100 μm。科学探测卫星初步测试结果表明,质心检测与修正任务均达到指标要求。后续随着姿态敏感器与惯性测量敏感器测量精度的进一步提高,研制高精度质心调节机构,质心检测与修正技术有望进一步提高。
3.5 高精度惯性测量技术
静电加速度计相比其他类型的加速度计,具有精度高、结构对称、体积小,以及能够实现6个自由度同时测量的特点。从20世纪70年代以来,高精度静电加速度计在重力卫星、引力波探测等空间项目中得到成功应用验证,已成为航天领域重要的载荷之一。目前,国际上已发射的3颗重力卫星中星载加速度计均采用法国宇航材料研究局(ONERA)研制的静电加速度计[18-20],其静电分辨率从10-8m/(s2·Hz1/2)量级提高到10-12m/(s2·Hz1/2)量级。天琴一号卫星实现了设计分辨率达10-12m/(s2·Hz1/2)量级的惯性传感器在轨验证,未来面向空间引力波探测计划的科学需求,其惯性传感器的分辨率需求更是达到10-15m/(s2·Hz1/2)量级[21-22]。更高的技术指标要求,需要深入开展更高精度惯性传感器的技术攻关,包括高精度探头研制、高精度位移传感器技术、电荷测量与电荷管理技术,以及高精度的地面测试技术等研究。
4 结束语
空间引力波探测对航天器提出了更高的指标要求,也带来了巨大的技术挑战。欧美与中国等在空间引力波探测领域均获得了巨大的进步,例如欧洲的LISA Pathfinder技术验证任务圆满成功,中国的天琴一号卫星各项关键技术在轨成功验证。随着中国天琴二号卫星的立项与启动研制,将继续开展各项关键技术的研究与在轨验证工作,尽早实现中国空间引力波探测的目标。
猜你喜欢
国际太空(2022年7期)2022-08-16
科学家(2022年3期)2022-04-11
国际太空(2022年2期)2022-03-15
航天器工程(2022年1期)2022-02-21
载人航天(2021年5期)2021-11-20
科学与财富(2021年34期)2021-05-10
百科探秘·航空航天(2020年12期)2020-01-22
智富时代(2018年8期)2018-09-28
智富时代(2018年8期)2018-09-28
科学之谜(2018年6期)2018-09-14
